单相机跨视野测距平台标定方法、测距方法和系统与流程
1.本发明涉及机器视觉技术领域,具体涉及一种测距平台标定方法、测距方法和系统。
背景技术:
2.随着制造业的发展,利用机器视觉技术进行工件测量、产品检测成为提高生产效率和产品质量的重要手段。目前,对于测量单个相机视野内的小尺寸工件已有成熟的解决方案,而对于测量大尺寸工件,要么采用单个大视野相机,要么采用多个小视野相机,这都会增加测量系统的成本并降低测量的精度。因此,采用单相机跨视野测量大尺寸工件成为一种实际需求。但由于工件处于单个相机不同视野内,工件的测距端点位于不同的图像中,通过技术手段精确获得测距端点的世界坐标成为解决问题的关键。
技术实现要素:
3.针对目前实际生产需要,本发明提供一种单相机跨视野测距平台标定方法、测距方法和系统。
4.本发明公开一种单相机跨视野测距平台标定方法,采用如下步骤:步骤1、使用一块标定板,放置在平台上,标定板大小要能够覆盖测距平台的测距范围。移动平台,分别将标定板上的多个圆点(如12个圆点,本发明仅以12个圆点为例进行说明)大致对准相机光心,每对准一个点就控制相机拍摄一张图像;步骤2、分别测出12张图像中离相机光心最近的圆点圆心的像素坐标,并分别记录每张图像对应的平台坐标;步骤3、选择标定板左上角的圆点图像作为参考图像,根据标定板上圆点的圆心距,分别计算出另外11张图像中心点相对参考图像中心点的像素坐标;步骤4、根据12组图像中心点像素坐标及其对应的平台坐标,求解变换矩阵(标定矩阵)。
5.本发明公开的一种单相机跨视野测距平台测距方法,采用如下步骤:步骤1、根据测距需要,移动平台,使要测距的其中一个端点进入相机视野中心附近,控制相机拍摄一张图像,测出该端点与图像中心点的图像坐标偏差并记录平台坐标值,根据偏差值,使用变换矩阵(标定矩阵)求出测距端点对应的平台坐标值;步骤2、用步骤5所述方法,获取另一个端点对应的平台坐标;步骤3、根据两端点对应的平台坐标,即可求出两端点间的距离,实现测距要求;本发明公开的一种机器视觉测距系统,包括:标定板:大小要能够覆盖测距平台的测距范围,其上分布3行4列大小相同的12个圆点,要求圆点的行间距相等,列间距也相等;测距平台:所述测距平台用于承载工件,下方设有光源系统;相机:所述相机为小视野单相机,设于所述测距平台上方,所述相机与所述计算机
连接,用于获取标定板图像和工件图像;计算机:所述计算机根据所述相机拍摄的标定板图像,获得平台在跨视野移动时相机光心的像素坐标及对应的测距平台坐标,然后求取相机光心的像素坐标与平台坐标的映射关系,通过此映射关系,计算出工件测距端点像素坐标对应的测距平台坐标,进而计算得到工件测距端点间的距离。
6.本发明实现了单相机、跨视野机器视觉,将具有多个视野范围的平台统一标定,获得一个统一的标定矩阵,从而通过一个相机能同时进行多个分散的区域的取图测量,实现了大区域内大距离的测量,避免了一个相机大视野情况下测量误差大及像素浪费的问题,也避免了多相机小视野的成本问题。本发明结构简单,使用方便,成本低廉,具有很好的应用价值。
附图说明
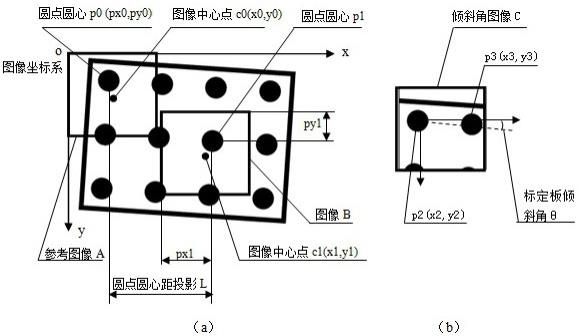
7.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:图1为实施例一中标定板、相机、平台相对位置示意图;图2为实施例一中圆点图像及图像坐标系示意图;图3为实施例二中测距方法示意图;图4为实施例三中机器视觉测距系统的结构简图。
具体实施方式
8.实施例一本实施例公开一种单相机跨视野测距平台标定方法。如图1所示是标定板、相机、平台三者相对位置示意图,按照“右手法则”建立世界坐标系xoy。其中,相机是固定不动的,标定板放置在平台上,随平台一起沿x方向和y方向移动。
9.本实施例提供的一种单相机跨视野测距平台标定方法包括如下步骤:步骤1、准备1副有多个圆点(如12个圆点,本发明仅以12个圆点为例进行说明)的标定板,标定板大小要能够覆盖测距平台的测距范围,相邻圆点圆心列间距为c,相邻圆点圆心行间距为r。列间距c或行间距r应小于相机视野,便于本实施例步骤6计算标定板倾斜角。标定板可使用第三方提供的标准标定板,也可按照如下步骤和要求进行制作:(1)准备一张打印纸,打印纸的大小要能够覆盖测距平台的测距范围;(2)如图1所示,在打印纸上打印12个半径相同的实心圆点,12个圆点以3行4列的方式排列。圆点的行间距相等,都为r,列间距也相等,都为c,行间距r和列间距c可以相等,也可以不相等;(3)为了保证标定的精度,要求圆点的圆度误差、圆点间距误差在一定的范围内;(4)打印出来后,测量打印纸上圆点的行间距r和列间距c并记录;步骤2、将标定板放置在平台上,大致摆正,处于平台中央位置;步骤3、平台复位后移动平台,依次将标定板上的12个圆点大致对准相机光心,每对准一个圆点就控制相机拍摄一张图像;步骤4、如图2(a)所示,选择标定板左上角的圆点图像a作为参考图像建立像素坐
标系xoy,坐标系原点定在图像左上角;步骤5、分别测出12张图像中离图像中心最近的圆点圆心在本图像中的像素坐标(px,py),并分别记录每张图像对应的平台坐标(x,y);步骤6、移动平台,任选标定板上相邻两圆点置于相机视野内,控制相机拍摄一张图像c,如图2(b)所示;步骤7、根据标定板上圆点的圆心距及标定板相对相机的倾斜角,分别计算出另外11张图像的中心点在图像坐标系xoy中的像素坐标。以图2所示左上角圆点图像a和第2行第3列圆点图像b为例,求解图像b中心点像素坐标的计算公式推导过程如下:(1)如图2(b)所示,测得圆点圆心p2在c图像的像素坐标为(x2,y2),圆点圆心p3在c图像的像素坐标为(x3,y3),则:标定板对相机的倾斜角θ = arctg((y2
‑
y1)/(x2
‑
x1))(2)如图2(a)所示,可测得左上角圆点图像(参考图像)的中心点c0的像素坐标为(x0,y0),圆点圆心p0的像素坐标为(px0,py0),第2行第3列圆点图像圆点圆心p1到图像左边距的长为px1个像素,到图像上边距的长为py1个像素。已知图像的分辨率为rc,圆点的列间距为c,行间距为r,则:圆点圆心p0到圆点圆心p1间的距离距离d在图像坐标系x方向的投影lx = d﹒cosθ距离d在图像坐标系y方向的投影ly = d﹒sinθ图像b中心点c1的x方向像素坐标x1 = x0 + ( lx + px0
ꢀ‑ꢀ
px1 )图像b中心点c1的y方向像素坐标y1 = y0 + ( ly + py0
ꢀ‑ꢀ
py1 )步骤8、用与步骤7同样方法可计算得到每个圆点图像中心点的像素坐标。这样,就可得到12组图像中心点像素坐标及其对应的平台坐标;步骤9、根据上述得到的12组坐标,采用最小二乘法,用多项式拟合出变换矩阵(标定矩阵)。图像中心点像素坐标(x,y)与平台坐标(x,y)之间的变换关系为: =r
ꢀꢀ
+ m其中,r为一旋转矩阵,m为一平移矩阵。上式可展开为:
ꢀꢀ
=和
ꢀꢀ
=其中,a、b、c、d、e和f即为要求的系数,这6个系数组成变换矩阵(标定矩阵)。6个未知数,24个方程,这是一个超定方程,应用最小二乘法,求得最优解,从而得到变换矩阵(标定矩阵)t,即得到系数a、b、c、d、e和f。
10.实施例二本实施例提供一种单相机跨视野测距平台测距方法,包括:步骤1、如图3所示,工件ab放置在平台上,端点a和端点b间的距离超出了相机一个
视野范围。为了测出a、b间的距离,移动平台,使要测距的a端点进入相机视野中心附近,控制相机拍摄一张图像;步骤2、测出a端点与图像中心点c1的像素坐标偏差δx1和δy1,记录此时的平台坐标值(x1,y1)。根据偏差值δx1和δy1,使用变换矩阵(标定矩阵)t求出测距端点a对应的平台坐标值(x1+δx1,y1+δy1),其中:δx1 = a﹒δx1 + b﹒δy1,δy1 = c﹒δx1 + d﹒δy1步骤3、用同样方法,获取另一个端点b对应的平台坐标值(x2+δx2,y2+δy2);步骤4、根据端点a和端点b对应的平台坐标,即可求出两端点间的距离d,实现测距要求,如下:。
11.实施例三如图4所示,其为本实施例中机器视觉测距系统的结构简图。本实施例公开的一种机器视觉测距系统,包括标定板、测距平台、相机、计算机、plc、伺服驱动系统等。标定板用于标定图像像素坐标与平台坐标的映射关系,其大小要能够覆盖测距平台的测距范围。标定板可使用第三方提供的标准标定板,也可根据测距平台的大小进行定制。测距平台用于承载工件。相机设于测距平台上方,与计算机连接,用于获取标定板图像和工件图像。计算机采用配置多串口、多网口的工控机。标定时,计算机根据相机拍摄的标定板图像,获得平台在跨视野移动时相机光心的像素坐标及对应的测距平台坐标,然后求取相机光心的像素坐标与平台坐标的映射关系。测距时,计算机使用标定矩阵,计算出工件测距端点像素坐标对应的测距平台坐标,进而计算得到工件测距端点间的距离。plc根据计算机发出的移动测距平台的请求信号,控制伺服系统驱动测距平台移动到指定位置。
12.以上所述仅为本发明的实施方式而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理内所作的任何修改、等同、替换、改进等,均应包括在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1