一种机械压力机机身结构优化设计方法
1.本技术涉及机械领域,尤其涉及一种机械压力机机身结构优化设计方法。
背景技术:
2.机械压力机是用于实现锻造和冲压过程的最重要的机床类别之一,近年来对高精度部件的需求使伺服机械压机的成形精度成为巨大的挑战。
3.在工作过程中,成型载荷最终被施加到作为压力机的主要承重部件的机架上使其变形,而机架的变形会影响到零部件的成形的精度。因此,机架的高刚度是满足高精度成形的前提条件。压力机机架结构的传统设计过程严重依赖与设计人员的设计经验,即使所设计的机架刚度满足要求,但依然导致机架的尺寸大,材料利用率低;若设计人员依据先进的结构设计方法,如拓扑优化等,所设计出的复杂结构难以实现加工制造。
4.因此,如何利用先进设计方法设计出满足机械压力机机架高刚度、轻量化的同时满足可制造性是当前亟需解决的技术问题。
技术实现要素:
5.本技术的目的之一在于提供一种机械压力机机身结构优化设计方法,旨在改善现有的机械压力机机架的设计效果差的问题。
6.本技术的技术方案是:
7.一种机械压力机机身结构优化设计方法,包括以下步骤:
8.s1,提取机械压力机机架的原始三维模型,对所述机架的原始三维模型的微小结构进行清理;
9.s2,对所述机械压力机的连杆结构进行静力学分析,获得所述连杆结构与所述机架铰接处的所述机架上的受力值;
10.s3,将所述机架上的受力值作为受力边界条件,对所述机架进行有限元静力学分析获得所述机架的变形参数;
11.s4,对所述机架的原始三维模型进行填充处理以建立优化空间,将所述机架的变形参数作为约束条件建立所述机架的拓扑优化模型,并对所述机架的拓扑优化模型进行拓扑优化;
12.s5,根据所述机架的拓扑优化结果,提取所述机架的各个局部阶梯结构特征;通过凸样条曲线判别方法、凹样条曲线判别方法以及直线判别方法,并结合凸形填充方法、凹形填充方法、直线填充方法以及直角填充方法对所述机架进行填充设计。
13.作为本技术的一种技术方案,在步骤s1中,包括以下步骤:
14.将用于生产制造的所述机械压力机机架的原始三维模型从装配体中提取出来,去掉所述机架上的每块钢板上的所述微小结构,所述微小结构包括小圆孔结构和倒角结构。
15.作为本技术的一种技术方案,在步骤s2中,包括以下步骤:
16.将所述连杆结构中的传动杆系单独提取出来,建立所述传动杆系中的传动杆件的
下死点的静力学平衡方程;将静力学平衡方程中的最大公称力、杆杆夹角作为已知条件,求解所述连杆结构与所述机架铰接处所述机架上的受力值。
17.作为本技术的一种技术方案,在步骤s3中,包括以下步骤:
18.将所述机架的原始三维模型导入有限元软件中并进行网格划分,并将步骤s2中求解得到的受力值作为静力学分析的受力边界条件来建立所述机架的有限元模型,计算提取特征点的位移参数;所述特征点的位移参数包括所述机架上铰接点在垂直方向上的位移值、所述机架上与滑块相接触的导轨在水平方向的位移值、下基座在垂直方向上的位移值。
19.作为本技术的一种技术方案,在步骤s4中,包括以下步骤:
20.将由多块钢板焊接而成的所述机架进行重新建模,得到一个整体的所述机架三维模型;将整体的所述机架三维模型中的空腔部分填充与所述机架相同的材料,并将步骤s3中提取出的特征点位移参数作为约束条件、以单元密度作为变量、以最体积百分比作为目标函数,建立所述机架的拓扑优化模型;所述机架的拓扑优化模型的表达方程式如下:
21.设计变量:ρ
e
,0≤ρ
min
≤ρ
e
≤1
22.优化目标:
23.约束条件:k
e
=(ρ
e
)
p
k024.d
1z
≤d
1z
,d
2z
≤d
2z
,d
3x
≤d
3x
,d
4x
≤d
4x
;
25.其中,ρ
e
是单元e的相对密度,ρ
min
是单元相对密度的最小值,δ代表体积分数,v是优化前的所述机架的体积,v0分别优化后的所述机架体积,n代表总的单元数,v
e
代表第e个单元体积,k
e
和k0分别代表第e个单元刚度和原始材料刚度,p为惩罚因子,d
1z
为所述机架上铰接点在垂直方向上的最大位移值,d
2z
为所述机架上铰接点在垂直方向上的最大位移值,d
3x
为所述机架上与所述滑块相接触的左部分导轨在水平方向的位移值,d
4x
为所述机架上与所述滑块相接触的右部分导轨在水平方向的值。
26.作为本技术的一种技术方案,在步骤s5中,所述局部阶梯结构为在所述机架拓扑优化过程中由于单个单元或多个单元被连续去除而在所述机架拓扑优化结果中出现的由保留的连续单元组成的呈阶梯形状的结构,且所述局部阶梯结构的特征包括所述局部阶梯结构的整体外形尺寸、组成所述局部阶梯结构的各个小阶梯结构的外形尺寸。
27.作为本技术的一种技术方案,在步骤s5中,包括以下步骤:
28.提取收敛后的拓扑优化的所述机架三维模型,根据所述机架的机身上各个所述局部阶梯结构特征,通过所述凸样条曲线判别方法、所述凹样条曲线判别方法以及所述直线判别方法,并结合所述凸形填充方法、所述凹形填充方法、所述直线填充方法以及所述直角填充方法对所述机架进行填充设计;其中:
29.在所述凸形填充方法中,凸样条曲线拟合判别条件为:
[0030][0031]
其中,a1为所述局部阶梯结构中第一个阶梯上的最高点在三维空间中的横坐标,a2为所述局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为所述局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为所述局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为所述局部阶梯结构中的第三个阶梯上最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0032]
凸样条曲线拟合是在已有样条曲线拟合的三维软件中进行,拟合完成后再设计所述机架的机身上各个所述局部阶梯结构的轮廓曲线,根据轮廓曲线对所述机架的机身上各个所述局部阶梯结构进行填充建模;
[0033]
在所述凹形填充方法中,凹样条曲线拟合判别条件为:
[0034][0035]
其中,a1为所述局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为所述局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为所述局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为所述局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为所述局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0036]
凹样条曲线拟合是在已有样条曲线拟合的三维软件中进行,拟合完成后再设计所述机架的机身上各个所述局部阶梯结构的轮廓曲线,根据轮廓曲线对所述机架的机身上各个所述局部阶梯结构进行填充建模;
[0037]
在所述直线填充方法中,一次直线拟合判别条件为:
[0038][0039]
其中,a1为所述局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为所述局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为所述局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为所述局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为所述局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0040]
一次直线拟合是在已有样条曲线拟合的三维软件中进行,拟合完成后再设计所述机架的机身上各个所述局部阶梯结构的轮廓曲线,根据轮廓曲线对所述机架的机身上各个所述局部阶梯结构进行填充建模;
[0041]
在所述直角填充方法中,直角形状拟合判别条件为:满足以下任一判别条件:
[0042]
或
[0043]
或
[0044][0045]
其中,a1为所述局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为所述局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为所述局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为所述局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为所述局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0046]
直角形状拟合是在已有样条曲线拟合的三维软件中进行,拟合完成后再设计所述机架的机身上各个所述局部阶梯结构的轮廓曲线,根据轮廓曲线对所述机架的机身上各个所述局部阶梯结构进行填充建模;当所有的所述局部阶梯结构填充完成后,最终获得填充后的所述机架的整体结构。
[0047]
作为本技术的一种技术方案,在步骤s5中,所述凸形填充方法为通过三维建模软件并依据所述局部阶梯结构的外形尺寸进行样条曲线构建时,所述局部阶梯结构上有多个连续状的小阶梯,当第一个小阶梯上的最高点与最后一个小阶梯上的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点均在这条直线之上时,即可判断需拟合出的样条曲线为凸样条曲线,然后将所述局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的样条曲线,将得到的所述样条曲线与所述局部阶梯结构的初始轮廓线连接起来,便得到最终轮廓线,再在三维建模软件中将所述最终轮廓线中缺乏材料的部分沿着垂直于所述最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构;所述凹形填充方法为通过三维建模软件并依据所述局部阶梯结构的外形尺寸进行样条曲线构建时,所述局部阶梯结构上有多个连续状的小阶梯,当第一个小阶梯的最高点与最后一个小阶梯上的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点在这条直线之下时,即可判断需拟合出的样条曲线为凹样条曲线,然后将所述局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的样条曲线,将得到的样条曲线与所述局部阶梯结构轮廓连接起来,得到最终轮廓线,再在三维建模软件中将所述最终轮廓线中缺乏材料的部分沿着垂直于所述最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构;所述直线填充方法为通过三维建模软件并依据所述局部阶梯结构的外形尺寸进行样条曲线构建时,所述局部阶梯结构上有多个
连续状的小阶梯,当第一个小阶梯的最高点与最后一个小阶梯的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点处于这条直线上时,即可判断需拟合的线段为一条直线,然后将所述局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的直线,将得到的直线与所述局部阶梯结构轮廓连接起来,得到最终轮廓线,再在三维软件中将所述最终轮廓线中缺乏材料的部分沿着垂直于所述最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构;所述直角填充方法为满足所述凸样条曲线判别方法、凹样条曲线判别方法或者直线判别方法时,将所述局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的凸样条曲线、凹样条曲线或者直线,将得到的凸样条曲线、凹样条曲线或者直线与所述局部阶梯结构轮廓连接起来,得到基体轮廓线,再在三维软件中将所述基体轮廓线中缺乏材料的部分沿着垂直于所述基体轮廓线的方向进行拉伸填充,进而得到填充之后的局部结构基体,根据所述局部结构基体的长宽高来构建长宽草图或长高草图或者宽高草图;所述长宽草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以所述封闭图形为拉伸轮廓在三维软件中拉伸所述局部结构基体的高度;所述长高草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以所述封闭图形为拉伸轮廓在三维软件中拉伸所述局部结构基体的宽度;所述宽高草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以所述封闭图形为拉伸轮廓在三维软件中拉伸所述局部结构基体的长度;进而得到填充之后的最终局部结构。
[0048]
本技术的有益效果:
[0049]
本技术的机械压力机机身结构优化设计方法中,其通过建立拓扑优化后局部结构的填充设计准则,可以实现机架的良好制造性与高刚度设计,满足低成本制造与高精度要求,同时由于本方法直接实现机架的刚度设计,可以减小后续尺寸优化和形状优化设计周期,可广泛应用于压力机机身结构的优化设计。
附图说明
[0050]
为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0051]
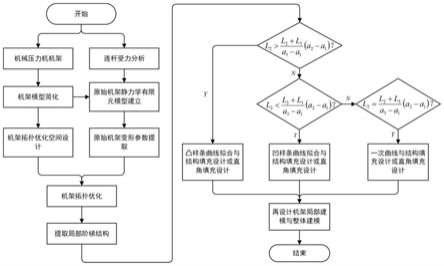
图1为本技术实施例提供的机械压力机机身结构优化设计方法流程示意图;
[0052]
图2为本技术实施例提供的机架的原始三维模型示意图;
[0053]
图3为本技术实施例提供的重新建模后的机架三维模型示意图;
[0054]
图4为本技术实施例提供的填充后的机架三维模型示意图;
[0055]
图5为本技术实施例提供的连杆结构受力分析示意图;
[0056]
图6为本技术实施例提供的拓扑优化后的机架三维模型示意图;
[0057]
图7为本技术实施例提供的凸形填充方法示意图;
[0058]
图8为本技术实施例提供的凹形填充方法示意图;
[0059]
图9为本技术实施例提供的直线填充方法示意图;
[0060]
图10为本技术实施例提供的直角填充方法示意图;
[0061]
图11为本技术实施例提供的拓扑优化后的机架经过填充之后的三维模型示意图;
[0062]
图12为本技术实施例提供的简化后的阶梯结构及坐标示意图。
[0063]
图标:1
‑
机架;2
‑
滑块;3
‑
下基座;4
‑
下死点。
具体实施方式
[0064]
为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和展示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
[0065]
因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0066]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0067]
在本技术的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0068]
此外,在本技术中,除非另有明确的规定和限定,第一特征在第二特征之上或之下可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征之上、上方和上面包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征之下、下方和下面包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0069]
此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
[0070]
在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
[0071]
实施例:
[0072]
请参照图1,配合参照图2至图12,本技术提供一种机械压力机机身结构优化设计方法,其结合2500kn机械伺服压力机机架1进行设计实例说明;该设计方法主要包括以下步骤:
[0073]
s1,提取机械压力机机架1的原始三维模型,对机架1的原始三维模型的微小结构进行清理;
[0074]
s2,对机械压力机的连杆结构进行静力学分析,获得连杆结构与机架1铰接处的机架1上的受力值;
[0075]
s3,将机架1上的受力值作为受力边界条件,对机架1进行有限元静力学分析获得机架1的变形参数;
[0076]
s4,对机架1的原始三维模型进行填充处理以建立优化空间,将机架1的变形参数作为约束条件建立机架1的拓扑优化模型,并对机架1的拓扑优化模型进行拓扑优化;
[0077]
s5,根据机架1的拓扑优化结果,提取机架1的各个局部阶梯结构特征;通过凸样条曲线判别方法、凹样条曲线判别方法以及直线判别方法,并结合凸形填充方法、凹形填充方法、直线填充方法以及直角填充方法对机架1进行填充设计。
[0078]
进一步地,在步骤s1中,将用于生产制造的机械压力机机架1 的原始三维模型从装配体中提取出来,去掉机架1上的每块钢板上的微小结构,该微小结构包括小圆孔结构、倒角结构等特征。
[0079]
例如,如图2至图4所示,将用于生产制造的机械压力机(其公称压力为2500kn)机架1(其长宽高为3420mm
×
3420mm
×
4405mm) 的三维模型从装配体中提取出来,该机架1由多块厚钢板组成,去掉每块厚钢板上的小圆孔、倒角、油路孔等不影响机架1整体结构尺寸与性能的微小结构,按照机架1尺寸1:1建立机架1整体模型。
[0080]
同时,在步骤s2中,将连杆结构中的传动杆系单独提取出来,建立传动杆系中的传动杆件的下死点4的静力学平衡方程;将静力学平衡方程中的最大公称力、杆杆夹角作为已知条件,求解连杆结构与机架1铰接处机架1上的受力值。
[0081]
例如,如图5所示,首先将连杆结构的传动杆系单独提取出来,其设置于下基座3上。其中,ab为上肘杆,bc为连杆,bd为下肘杆,上肘杆ab、连杆bc、下肘杆bd三者在铰链b处铰接,上肘杆ab的一端与机架1铰接在a处,下肘杆bd的一端与滑块2铰接在d处,连杆bc的一端与螺杆上的滑块铰接在c处,滑块2与机架1接触并在机架1的内部可滑动。建立传动杆件下死点4的静力学平衡方程,将最大公称力、杆杆夹角等作为已知条件求解连杆与机架 1铰接处机架1上的受力大小,如表1所示。
[0082]
表1各个分力的大小(kn)
[0083]
分力f
m
f
ax
f
ay
f
cy
大小2500296103045
[0084]
需要说明的是,在表1中,f
m
代表公称力的大小,f
ax
代表机架 1上铰链a承受的水平方向的力大小,f
ay
代表机架1上铰链a承受的垂直方向的力大小,f
cy
代表机架1上顶部承受的垂直方向的力大小。
[0085]
进一步地,在步骤s3中,将机架1的原始三维模型导入有限元软件中并进行网格划分,并将步骤s2中求解得到的受力值作为静力学分析的受力边界条件来建立机架1的有限元模型,经过计算提取特征点的位移参数,其中,特征点的位移参数包括机架1上铰接点在垂直方向上的位移值、机架1上与滑块2相接触的导轨在水平方向的位移值、下基座3在垂直方向上的位移值;从而得到例如图5中的铰链 a点在竖直方向的位移为0.3745mm,得到机架1与滑块2的接触部分在x轴方向的位移大小为0.1179mm。
[0086]
需要说明的是,在步骤s4中,将原始由多块厚钢板焊接而成的空腔壳体机架1进行重新建模,得到一个整体的机架1三维模型;将整体的机架1三维模型中的空腔部分填充满与机架1相同的材料,且不改变机架1上装配部分的尺寸及形状;并将步骤s3中提取出的特征点位移参数作为主要的约束条件、以单元密度作为变量、以最体积百分比作为目标函数,建立机架1的拓扑优化模型;机架1的拓扑优化模型的表达方程式如下:
[0087]
设计变量:ρ
e
,0≤ρ
min
≤ρ
e
≤1
[0088]
优化目标:
[0089]
约束条件:k
e
=(ρ
e
)
p
k0[0090]
d
1z
≤d
1z
,d
2z
≤d
2z
,d
3x
≤d
3x
,d
4x
≤d
4x
;
[0091]
其中,ρ
e
是单元e的相对密度,ρ
min
是单元相对密度的最小值,δ代表体积分数,v是优化前的机架1的体积,v0分别优化后的机架1的体积,n代表总的单元数,v
e
代表第e个单元体积,k
e
和k0分别代表第e个单元刚度和原始材料刚度,p为惩罚因子,d
1z
为机架1 上铰接点在垂直方向上的最大位移值,d
2z
为机架1上铰接点在垂直方向上的最大位移值,d
3x
为机架1上与滑块2相接触的左部分导轨在水平方向的位移值,d
4x
为机架1上与滑块2相接触的右部分导轨在水平方向的值。
[0092]
需要说明的是,在步骤s5中,局部阶梯结构为在机架1拓扑优化过程中由于单个单元或多个单元被连续去除而在机架1拓扑优化结果中出现的由保留的连续单元组成的呈阶梯形状的结构,且局部阶梯结构的特征包括局部阶梯结构的整体外形尺寸、组成局部阶梯结构的各个小阶梯结构的外形尺寸。
[0093]
同时,在步骤s5中,如图6至图12,提取收敛后的拓扑优化的机架1三维模型,根据机架1的机身上各个局部阶梯结构特征,通过凸样条曲线判别方法、凹样条曲线判别方法以及直线判别方法,并结合凸形填充方法、凹形填充方法、直线填充方法以及直角填充方法对机架1进行填充设计;其理想化的阶梯结构及坐标如图12所示;其中:
[0094]
在凸形填充方法中,凸样条曲线拟合判别条件为:
[0095][0096]
其中,a1为局部阶梯结构中第一个阶梯上的最高点在三维空间中的横坐标,a2为局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为局部阶梯结构中的第三个阶梯上最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0097]
凸样条曲线拟合是直接在已有样条曲线拟合的三维软件中进行,拟合完成后再设
计机架1的机身上各个局部阶梯结构的轮廓曲线,根据轮廓曲线对机架1的机身上各个局部阶梯结构进行填充建模;
[0098]
在凹形填充方法中,凹样条曲线拟合判别条件为:
[0099][0100]
其中,a1为局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0101]
凹样条曲线拟合是直接在已有样条曲线拟合的三维软件中进行,拟合完成后再设计机架1的机身上各个局部阶梯结构的轮廓曲线,根据轮廓曲线对机架1的机身上各个局部阶梯结构进行填充建模;
[0102]
在直线填充方法中,一次直线拟合判别条件为:
[0103][0104]
其中,a1为局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为局部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0105]
一次直线拟合是直接在已有样条曲线拟合的三维软件中进行,拟合完成后再设计机架1的机身上各个局部阶梯结构的轮廓曲线,根据轮廓曲线对机架1的机身上各个局部阶梯结构进行填充建模;
[0106]
在直角填充方法中,直角形状拟合判别条件为:满足以下任一判别条件:
[0107]
或
[0108]
或
[0109][0110]
其中,a1为局部阶梯结构中的第一个阶梯上最高点在三维空间中的横坐标,a2为局
部阶梯结构中的与第一个阶梯相邻接的第二个阶梯上的最高点的横坐标,a3为局部阶梯结构中的与第二个阶梯相邻接的第三个阶梯上的最高点在三维空间中的横坐标;l2为局部阶梯结构中的第二个阶梯上的最高点相对于第一个阶梯上的最高点在三维空间中的纵坐标,l3为局部阶梯结构中的第三个阶梯的最高点相对于第二个阶梯上的最高点在三维空间中的纵坐标;
[0111]
直角形状拟合是直接在已有样条曲线拟合的三维软件中进行,拟合完成后再设计机架1的机身上各个局部阶梯结构的轮廓曲线,根据轮廓曲线对机架1的机身上各个局部阶梯结构进行填充建模;当所有的局部阶梯结构填充完成后,最终获得填充后的机架1的整体结构。
[0112]
进一步地,需要说明的是,在步骤s5中,如图7中所示,凸形填充方法为通过三维建模软件并依据局部阶梯结构的外形尺寸进行样条曲线构建时,局部阶梯结构上有多个连续状的小阶梯,当第一个小阶梯上的最高点与最后一个小阶梯上的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点均在这条直线之上时,即可判断需拟合出的样条曲线为凸样条曲线,然后将局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的样条曲线,将得到的样条曲线与局部阶梯结构的初始轮廓线连接起来,便得到最终轮廓线,再在三维建模软件中将最终轮廓线中缺乏材料的部分沿着垂直于最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构。
[0113]
如图8中所示,凹形填充方法为通过三维建模软件并依据局部阶梯结构的外形尺寸进行样条曲线构建时,局部阶梯结构上有多个连续状的小阶梯,当第一个小阶梯的最高点与最后一个小阶梯上的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点在这条直线之下时,即可判断需拟合出的样条曲线为凹样条曲线,然后将局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的样条曲线,将得到的样条曲线与局部阶梯结构轮廓连接起来,得到最终轮廓线,再在三维建模软件中将最终轮廓线中缺乏材料的部分沿着垂直于最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构。
[0114]
如图9中所示,直线填充方法为通过三维建模软件并依据局部阶梯结构的外形尺寸进行样条曲线构建时,局部阶梯结构上有多个连续状的小阶梯,当第一个小阶梯的最高点与最后一个小阶梯的最高点连接为一条直线后,若处于二者之间的中间阶梯上的最高点处于这条直线上时,即可判断需拟合的线段为一条直线,然后将局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的直线,将得到的直线与局部阶梯结构轮廓连接起来,得到最终轮廓线,再在三维软件中将最终轮廓线中缺乏材料的部分沿着垂直于最终轮廓线的方向进行拉伸填充,进而得到填充之后的最终局部结构。
[0115]
如图10中所示,直角填充方法为满足凸样条曲线判别方法、凹样条曲线判别方法或者直线判别方法时,采用直角填充方法对局部阶梯结构进行填充设计来得到长方体结构,长方体结构保留了局部阶梯结构的最大外形尺寸,即该局部阶梯结构的长宽高,进而根据局部阶梯结构的外形尺寸采用同比例建模的方法得到具有相同长宽高的所述长方体结
构,长方体结构被填充的部分为长方体的体积减去原凸形填充后、凹形填充后或直线填充后所得到的体积。
[0116]
具体来说,直角填充方法即是将局部阶梯结构上的第一个阶梯上的最高点、中间依次连续相邻接的多个阶梯上的最高点以及最后一个阶梯上的最高点运用三维软件中的样条曲线功能将这多个点连接起来得到所需的凸样条曲线、凹样条曲线或者直线,将得到的凸样条曲线、凹样条曲线或者直线与局部阶梯结构轮廓连接起来,得到基体轮廓线,再在三维软件中将基体轮廓线中缺乏材料的部分沿着垂直于基体轮廓线的方向进行拉伸填充,进而得到填充之后的局部结构基体,根据局部结构基体的长宽高来构建长宽草图或长高草图或者宽高草图;长宽草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以封闭图形为拉伸轮廓在三维软件中拉伸局部结构基体的高度;长高草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以封闭图形为拉伸轮廓在三维软件中拉伸局部结构基体的宽度;宽高草图与所构建的凸样条曲线、凹样条曲线或者直线围成封闭图形,以封闭图形为拉伸轮廓在三维软件中拉伸局部结构基体的长度;进而得到填充之后的最终局部结构。
[0117]
因此,按照以上三种判别条件和四种填充方式,设计得到了如图 12中的再设计机架1,相比于直接拓扑优化的机架1,再设计机架1 由多块光滑的厚钢板组成。经过试验测量和重量测量,再设计机架1 最大位移(约为95um)相对于原始机架1的最大位移(约为160um) 减小约40%,再设计机架1的重量(约为208.3g)相对于原始机架 1的最大位移(约为153.3g)减小约26.4%。
[0118]
综上可知,本技术的机械压力机机身结构优化设计方法中,其通过建立拓扑优化后局部结构的填充设计准则,可以实现机架1的良好制造性与高刚度设计,满足低成本制造与高精度要求,同时由于本方法直接实现机架1的刚度设计,可以减小后续尺寸优化和形状优化设计周期,可广泛应用于压力机机身结构的优化设计。
[0119]
以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1