减速器齿轮非线性振动分析方法、计算机设备及存储介质
1.本发明涉及机械传动技术领域,特别涉及减速器齿轮非线性振动分析方法、计算机设备及存储介质。
背景技术:
2.减速器是纯电动汽车中必不可少的传动部件,在减速器中齿轮振动会引起强度、耐久性、可靠性和噪声问题,是汽车传动系统中的重要关注问题。纯电动汽车动力传递过程中产生的齿轮动态啮合力是这些系统噪声的主要来源。此外,减速器的振动特性对纯电动车的低噪,舒适性和效率都有很大影响。因此,在设计减速器时需对齿轮传动系统的振动进行分析。
3.而现有对于齿轮传动系统通常采用线性振动来进行分析,没有考虑非线性参数。简单的线性动力学模型对复杂的齿轮系统非线性特性的解释能力不足,不能准确的分析出规则振动、非周期运动和混沌运动等复杂现象,从而导致减速器齿轮系统的数据支撑不够准确,影响减速器齿轮系统的工作效果。
4.可见,现有技术还有待改进和提高。
技术实现要素:
5.鉴于上述现有技术的不足之处,本发明的目的在于提供一种减速器齿轮非线性振动分析方法,通过建立齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程对齿轮系统的非线性特性进行分析,获得齿轮系统的非线性振动结果,从而提高齿轮系统非线性振动分析的准确性,为减速器齿轮系统的设计提供准确的数据支持,增强减速器齿轮系统的工作效果。
6.为了达到上述目的,本发明采取了以下技术方案:
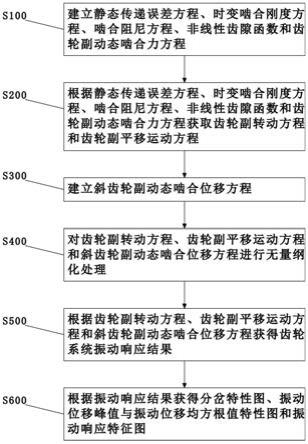
7.一种减速器齿轮非线性振动分析方法,具体包括以下步骤:
8.建立静态传递误差方程、时变啮合刚度方程、啮合阻尼方程、非线性齿隙函数和齿轮副动态啮合力方程;
9.根据静态传递误差方程、时变啮合刚度方程、啮合阻尼方程、非线性齿隙函数和齿轮副动态啮合力方程获取齿轮副转动方程和齿轮副平移运动方程;
10.建立斜齿轮副动态啮合位移方程;
11.根据齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程获得齿轮系统振动响应结果;
12.根据振动响应结果获得分岔特性图、振动位移峰值与振动位移均方根值特性图和振动响应特征图。
13.所述的减速器齿轮非线性振动分析方法中,所述建立斜齿轮副动态啮合位移方程之后还包括步骤:
14.对齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程进行无量
纲化处理。
15.所述的减速器齿轮非线性振动分析方法中,所述根据齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程获得齿轮系统振动响应结果,具体包括:
16.通过matlab软件对齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程进行求解,获得齿轮系统振动响应结果。
17.所述的减速器齿轮非线性振动分析方法中,所述静态传递误差方程表示为:
18.e
j
(t)=e
0j
+e
hj
sin(ω
hj
t+φ
hj
)
19.其中e
0j
,e
hj
和φ
hj
分别为恒定幅值、幅值和相位角;
20.其中齿轮副的激励啮合频率ω
hj
表示为:
[0021][0022]
其中ω
pj
和z
pj
分别为齿轮的转速和齿数;
[0023]
所述时变啮合刚度方程表示为:
[0024]
k
mj
(t)=k
oj
+a
kj
sin(ω
hj
t+φ
kj
)
[0025]
其中k
oj
为啮合刚度的平均值,a
kj
为刚度波动幅值,φ
kj
为相位角;
[0026]
所述啮合阻尼方程表示为:
[0027][0028]
其中r为基圆半径,i为齿轮转动惯量,p表示主动齿轮,g表示从动齿轮;
[0029]
所述非线性齿隙函数表示为:
[0030][0031]
其中s
j
为啮合齿轮副的半齿侧间隙,x
mj
为啮合点处的相对振动位移;
[0032]
所述齿轮副动态啮合力方程表示为:
[0033][0034][0035]
其中f
mj
为啮合齿面间的法向载荷,f
pix
,f
piy
,f
piz
,f
gix
,f
giy
,f
giz
分别为啮合力在各坐标轴方向上的分力,α
nj
,β
j
分别为法向压力角和螺旋角。
[0036]
所述的减速器齿轮非线性振动分析方法中,所述齿轮副转动方程表示为:
[0037][0038]
其中t
d
和t
l
分别为输入扭矩和负载扭矩,k1和c1中间轴刚度和中间轴阻尼;
[0039]
所述齿轮副平移运动方程表示为:
[0040][0041]
其中m
pj
,m
gj
,i
pj
,i
gj
(j=1,2)分别为一级和二级齿轮副中主动轮和从动轮的等效质量和转动惯量;c
nj
,k
nj
(n=x,y,z;j=1,2,3,4)为各齿轮副在传动过程中各主动轮和从动轮受到的轴承支撑在各轴方向上的等效刚度和阻尼。所述的减速器齿轮非线性振动分析方法中,一级齿轮副等效质量m
g1
和二级齿轮副等效质量m
g2
分别表示为:
[0042][0043]
所述的减速器齿轮非线性振动分析方法中,所述斜齿轮副动态啮合位移方程包括一级斜齿轮副动态啮合位移方程和二级斜齿轮副啮合位移方程。
[0044]
所述的减速器齿轮非线性振动分析方法中,所述一级斜齿轮副动态啮合位移方程表示为:
[0045][0046]
其中α
t1
,β1,r
bp1
,r
bg1
,分别为一级传动中齿轮的端面压力角、螺旋角、主动轮的基圆半径和从动轮的基圆半径,为一级传动的静态传递误差;
[0047]
所述二级斜齿轮副动态啮合位移方程表示为:
[0048][0049]
其中α
t2
,β2,r
bp2
,r
bg2
,分别为二级传动中齿轮的端面压力角、螺旋角、主动轮的基圆半径和从动轮的基圆半径,为二级传动的静态传递误差。
[0050]
本技术还提供一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的减速器齿轮非线性振动分析方法。
[0051]
本技术还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如上所述的减速器齿轮非线性振动分析方法。
[0052]
有益效果:
[0053]
本发明提供了一种减速器齿轮非线性振动分析方法,通过建立齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程对齿轮系统的非线性特性进行分析,并根据分岔特性图、振动位移峰值与振动位移均方根值特性图和振动响应特征图分析齿轮系统非线性振动结果,从而提高齿轮系统非线性振动分析的准确性,为减速器齿轮系统的设计提供准确的数据支持,增强减速器齿轮系统的工作效果。
附图说明
[0054]
图1为本发明提供的减速器齿轮非线性振动分析方法的控制流程图;
[0055]
图2为本发明提供的减速器齿轮非线性振动分析方法中步骤s500的控制流程图。
具体实施方式
[0056]
本发明提供了减速器齿轮非线性振动分析方法、计算机设备及存储介质,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明的保护范围。
[0057]
在本发明的描述中,需要理解的是,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0058]
请参阅图1,本发明提供了一种减速器齿轮非线性振动分析方法,具体包括以下步骤:
[0059]
s100、建立静态传递误差方程、时变啮合刚度方程、啮合阻尼方程、非线性齿隙函数和齿轮副动态啮合力方程;增加静态传递误差、时变啮合刚度、啮合阻尼、非线性齿轮间隙和齿轮副动态啮合力作为非线性振动分析的因素,通过对静态传递误差、时变啮合刚度、啮合阻尼、非线性齿轮间隙和齿轮副动态啮合力在齿轮系统动态过程中的变化进行分析,从而得到齿轮系统的非线性振动情况,提高了分岔特性和混沌运动的预测结果准确性,为减速器齿轮系统的设计提供准确的数据支持,增强减速器齿轮系统的工作效果。
[0060]
s200、根据静态传递误差方程、时变啮合刚度方程、啮合阻尼方程、非线性齿隙函
数和齿轮副动态啮合力方程获取齿轮副转动方程和齿轮副平移运动方程;通过静态传递误差方程、时变啮合刚度方程、啮合阻尼方程、非线性齿隙函数和齿轮副动态啮合力方程进行推导,从而得到齿轮副转动方程和齿轮副平移运动方程,并且根据齿轮副转动方程和齿轮副平移运动方程反映齿轮系统的动态结果。
[0061]
s300、建立斜齿轮副动态啮合位移方程;通过调节齿轮系统的端面压力角、螺旋角、主动轮的基圆半径、从动轮的基圆半径和静态传递误差预测出齿轮系统的振动响应,从而结合步骤s200的动态结果分析齿轮的非线性振动特性。
[0062]
s500、根据齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程获得齿轮系统振动响应结果。
[0063]
s600、根据振动响应结果获得分岔特性图、振动位移峰值与振动位移均方根值特性图和振动响应特征图;根据振动响应结果可得到齿轮系统在某工作转速下的分岔特性图、振动位移峰值与振动位移均方根值特性图和振动响应特征图,进而得到分岔特性、振动位移峰值图、振动位移均方根值和振动响应特征的结果;在某些实施方式中,根据分岔特性图可获取在某一转速下齿轮系统所产生的动态啮合位移的取值范围,所说在对减速器齿轮系统进行设计时,可以依据该动态啮合位移的取值范围进行调整。在某些实施方式中,根据振动位移峰值与振动位移均方根值特性图获取振动位移的均方根值和峰峰值,从而判断齿轮是否产生波动和跳变现象,即说明减速器齿轮系统在简述或加速过程中经过这一相应转速时会产生较大的振动。在某些实施方式中,所述振动相应特征图包括振动位移幅值图、振动响应历程图和振动响应图与poincar
é
截面图,通过振动位移幅值图获取齿轮系统的主振幅各个阶次的振幅,通过振动响应历程图获取齿轮系统在某一转速下的振动位移变化,通过振动响应图与poincar
é
截面图可判断齿轮系统的运动稳定性,进而根据主振幅各个阶次的振幅、振动位移变化和运动稳定性获知齿轮系统在该转速下的运动类型,并判断是否产生混动运动。
[0064]
进一步地,所述步骤s300建立斜齿轮副动态啮合位移方程之后还包括步骤:
[0065]
s400、对齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程进行无量纲化处理;通过无量纲化处理保证齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程减少方程的变量数,从而提高的求解准确性。
[0066]
在某些实施方式中,假设斜齿轮副系统中的力学模型的扭转固有频率为ω
nj
,则表示为:
[0067][0068]
其中k
mj
为每级齿轮副啮合刚度均值,m
ej
为每级齿轮副的等效啮合质量
[0069]
每级齿轮副的等效啮合质量m
ej
表示为:
[0070][0071]
时间变量t进行无量纲变化为:
[0072]
τ=ω
n
t
[0073]
各齿轮的各轴方向上的振动位移进行无量纲化:
[0074][0075][0076]
静态传递误差无量纲化为:
[0077][0078]
所述一级斜齿轮副动态啮合位移方程和所述二级斜齿轮副动态啮合位移方程无量纲化后分别表示为:
[0079][0080][0081]
进一步地,所述步骤s500根据齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程获得齿轮系统振动响应结果,具体包括:
[0082]
s510、通过matlab软件对齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程进行求解,获得齿轮系统振动响应结果;matlab软件通过龙格
‑
库塔法和ode
‑
45函数对齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程进行求解,从而提高求解精度。
[0083]
进一步地,所述静态传递误差方程表示为:
[0084]
e
j
(t)=e
0j
+e
hj
sin(ω
hj
t+φ
hj
)
[0085]
其中e
0j
,e
hj
和φ
hj
分别为恒定幅值、幅值和相位角;
[0086]
其中齿轮副的激励啮合频率ω
hj
表示为:
[0087][0088]
其中ω
pj
和z
pj
分别为齿轮的转速和齿数;
[0089]
所述时变啮合刚度方程表示为:
[0090]
k
mj
(t)=k
oj
+a
kj
sin(ω
hj
t+φ
kj
)
[0091]
其中k
oj
为啮合刚度的平均值,a
kj
为刚度波动幅值,φ
kj
为相位角;
[0092]
所述啮合阻尼方程表示为:
[0093][0094]
其中r为基圆半径,i为齿轮转动惯量,p表示主动齿轮,g表示从动齿轮;
[0095]
所述非线性齿隙函数表示为:
[0096][0097]
其中s
j
为啮合齿轮副的半齿侧间隙,x
mj
为啮合点处的相对振动位移;
[0098]
所述齿轮副动态啮合力方程表示为:
[0099][0100][0101]
其中f
mj
为啮合齿面间的法向载荷,f
pix
,f
piy
,f
piz
,f
gix
,f
giy
,f
giz
分别为啮合力在各坐标轴方向上的分力,α
nj
,β
j
分别为法向压力角和螺旋角。
[0102]
进一步地,所述齿轮副转动方程表示为:
[0103][0104]
其中t
d
和t
l
分别为输入扭矩和负载扭矩,k1和c1中间轴刚度和中间轴阻尼;
[0105]
所述齿轮副平移运动方程表示为:
[0106][0107]
其中m
pj
,m
gj
,i
pj
,i
gj
(j=1,2)分别为一级和二级齿轮副中主动轮和从动轮的等效质量和转动惯量;c
nj
,k
nj
(n=x,y,z;j=1,2,3,4)为各齿轮副在传动过程中各主动轮和从动轮受到的轴承支撑在各轴方向上的等效刚度和阻尼。进一步地,一级齿轮副等效质量m
g1
和二级齿轮副等效质量m
g2
分别表示为:
[0108][0109]
进一步地,所述斜齿轮副动态啮合位移方程包括一级斜齿轮副动态啮合位移方程和二级斜齿轮副啮合位移方程。
[0110]
进一步地,所述一级斜齿轮副动态啮合位移方程表示为:
[0111][0112]
其中α
t1
,β1,r
bp1
,r
bg1
,分别为一级传动中齿轮的端面压力角、螺旋角、主动轮的基圆半径和从动轮的基圆半径,为一级传动的静态传递误差;
[0113]
所述二级斜齿轮副动态啮合位移方程表示为:
[0114][0115]
其中α
t2
,β2,r
bp2
,r
bg2
,分别为二级传动中齿轮的端面压力角、螺旋角、主动轮的基圆半径和从动轮的基圆半径,为二级传动的静态传递误差。
[0116]
综上所述,通过建立齿轮副转动方程、齿轮副平移运动方程和斜齿轮副动态啮合位移方程对齿轮系统的非线性特性进行分析,并根据分岔特性图、振动位移峰值与振动位移均方根值特性图和振动响应特征图分析齿轮系统非线性振动结果,从而提高齿轮系统非线性振动分析的准确性,为减速器齿轮系统的设计提供准确的数据支持,增强减速器齿轮
系统的工作效果。
[0117]
本技术还提供一种计算机设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的减速器齿轮非线性振动分析方法。
[0118]
本技术还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序当被处理器执行时使所述处理器执行如上所述的减速器齿轮非线性振动分析方法。
[0119]
可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1