垂直起降可重复使用运载器试验样机快速弹道迭代计算法的制作方法
1.本发明属于飞行器弹道设计技术领域,具体为一种垂直起降可重复使用运载器试验样机快速弹道迭代计算法。
背景技术:
2.采用垂直起降技术的火箭与传统一次性火箭相比,最大的区别在于能否回收火箭一子级。随着商业航天发展,市场对低成本火箭的需求十分迫切,使用高可靠、低成本、可重复使用的火箭实现商业发射任务已成为未来发展趋势。但是直接开展可重复使用火箭研制技术难度大、风险高,需先开展垂直起降关键技术攻关与技术验证。为此设计的一种垂直起降可重复使用运载器试验样机用于垂直起降关键技术攻关与技术验证,因传统的弹道迭代算法收敛慢、初值敏感性高,不能满足试验样机的使用要求,需要对弹道进行适应性设计。
技术实现要素:
3.为了满足垂直起降可重复使用运载器试验样机用于垂直起降关键技术攻关与技术验证,本发明提供了一种垂直起降可重复使用运载器试验样机快速弹道迭代计算法,包括以下步骤:
4.s1、确定约束量要求及精度要求;
5.s2、确定待迭代的各控制量;
6.s3、给控制量赋初值;
7.s4、根据约束量与控制量之间的关系,确定修正系数;
8.s5、根据修正系数,计算修正量,进行弹道迭代计算;
9.s6、获得满足精度要求的弹道。
10.进一步地,所述步骤s1的具体内容为:
11.所述约束要求包括着陆点高度、速度、射程、落点方位角的要求,其中,末端高度约束要求为0m,精度要求为0.001m
‑
0.1m(最优选0.01m);末端速度要求为0m/s,精度要求为0.001m/s
‑
0.1m/s(最优选0.01m/s);射程精度要求为0.01m
‑
1m(最优选0.1m);落点方位角精度要求为0.01
°‑1°
(最优选0.1
°
)。
12.所述步骤s2的具体内容为:
13.确定待迭代的控制量,首先将弹道分为加速上升段、第一调推段、减速上升段、加速下降段、第二调推段、减速下降段,其中减速返回段结束高度hh为控制量之一,hh用于控制落点高度使其满足落点高度精度要求;随后对弹道全程的姿态角进行设计,其中表征俯仰角的特征量为控制量之一(用来控制射程),用于控制落点射程使其满足射程精度要求;射向角a0为第三个控制变量,a0用于控制落点方位角使其满足落点方位角精度要求,射向角定义为发射瞄准方向与发射点正北方向的夹角,落点方位角定义落点相对发射点的方向与发射点正北方向的夹角;
14.所述步骤s3的具体内容为:
15.给控制变量赋初值,所述初值可以使弹道迭代计算快速收敛;
16.所述步骤s4的具体内容为:
17.确定修正系数时,射向角与落点方位角、加速下降段结束高度与着陆高度单位相同且有较为明显的单调(单调递增或单调递减)关系,修正系数定为1;射程与的修正系数按照如下方式计算:每算完一条弹道,记录射程l与值,则修正系数为
18.进一步地,所述步骤s2中,
19.所述加速上升段的结束判断条件为发射系y向速度达到特定值vy1,该值的设定与弹道顶点高度相关:此段结束时刻为t1;
20.所述第一调推段的时长tm1与发动机调整推力的性能以及推力调整量相关;此段结束时刻为t2;
21.所述减速上升段结束判断条件为y向速度为0;此段结束时刻为t3:
22.所述加速下降段结束判断条件为高度达到控制量hh;此段结束时刻为t4;
23.所述第二调推段的时长tm2与发动机调整推力的性能以及推力调整量相关;此段结束时刻为t5;
24.所述减速下降段结束判断条件为y向速度为0,此段结束时刻为t6。
25.各段结束的时刻按时间顺序为t1、t2、t3、t4、t5、t6。
26.进一步地,所述步骤s5中进行弹道迭代计算时确定待迭代的各控制量时,不用各飞行段的时间作为控制量,而是分成六段飞行段分别用不同的更方便计算的物理量来做为控制量(六段的判断量更适合本弹道)的:加速上升段、第一调推段、减速上升段、加速下降段、第二调推段、减速下降段,各个段推力不同,各个段俯仰角不同,在初始时就确定了ao射向角但在整个过程中进行坐标系变换进行计算;在加速下降段将加速下降段结束的高度作为控制量hh。
27.进一步地,无需设计控制量用于满足着陆点三个方向速度要求,将减速下降段的结束判断条件设置为发射系y向速度为0,通过俯仰角和偏航角ψ设计,令返回段火箭推力方向与速度方向相反,可使着陆时发射系x向、z向速度回0,由于滚转角不影响三自由度弹道计算,所以全程滚转角为0。
28.进一步地,所述姿态角包括俯仰角和偏航角ψ,具体设计内容为:
29.在加速上升段:俯仰角为90
°
、偏航角为0
°
;
30.在第一调推段:俯仰角从90
°
匀速过渡至偏航角为0
°
;
31.在减速上升段:俯仰角为偏航角为0
°
;
32.在加速下降段、第二调推段、减速下降段:俯仰角从匀速过渡至为保持箭体姿态稳定,角速率不宜过大,随后俯仰角保持飞行,计算弹道倾角θ和弹道偏角σ,当记录下该时刻从该时刻起,令返回段俯仰角程序如下式所示:
[0033][0034]
加速下降段和第二调推段偏航角为0
°
,减速下降段计算弹道偏角σ,令偏航角ψ=
‑
σ;
[0035][0036]
具体地,在减速下降段,如果临近着陆速度过低,计算出的弹道倾角和弹道偏角可能出现较大跳变,处理方式为当速度小于0.1m/s的一瞬间,记录下当前姿态角ψ
f
,从该瞬间之后,令俯仰角和偏航角冻结在ψ
f
,直至y向速度达到0m/s。
[0037]
具体地,所述步骤s3中给控制变量赋初值,当约束量确定时,由于射向角与落点方位角定义方向一致、起始基准一致,所以将射向角初值定为与目标落点方位角azi0相等;减速返回段结束高度初值必定处于起飞点海拔高度h0和弹道顶点h
m
海拔高度之间,令hh=x
h
(h
m
‑
h0),其中x
h
∈(0,1),由于减速下降段结束的判断条件为y向速度为0m/s,如果x
h
太小,可能出现减速下降段结束时高度为负值的问题,此时无法求解有意义的大气参数,所以x
h
的取值区间定在(0.5,1.0)之间;特征量的初值取值范围为(0
°
,90
°
),可根据射程l(即图2中的l)要求进行选取,姿态角过大可能导致迭代发散的问题,较小的初值有利于迭代收敛。
[0038]
总体而言,通过本发明所构思的以上技术方案能够取得下列有益效果:
[0039]
1、本方法设置三个控制变量迭代求解满足着陆点位置要求的弹道,控制变量包括:射向、表征姿态角程序的特征量、减速返回段结束高度hh,位置要求包括:落点方位角、射程、终端高度。速度要求无需设置控制变量,通过姿态角设计实现x向和z向速度回零,将着每条弹道计算的结束点条件设置为发射系y向速度为零,在每次迭代过程中计算的弹道均能满足终端速度约束要求。该方法显著减少控制变量,加快迭代速度,可以解决传统迭代算法中收敛慢、初值敏感性高的问题。
[0040]
2、本方法设计的弹道满足垂直起降可重复使用运载器试验样机用于垂直起降关键技术攻关与技术验证的要求,简单可靠,为垂直起降可重复使用运载器的研制节约成本节约时间做出重要贡献。
附图说明
[0041]
图1为本发明弹道计算法的发射系示意图,坐标原点o1与发射点固连,x轴在发射平面内,指向发射瞄准方向,y轴垂直于发射点水平面指向天向,z轴与x,y轴构成右手直角坐标系;a0为射向角;o点为地球本身的坐标系原点;
[0042]
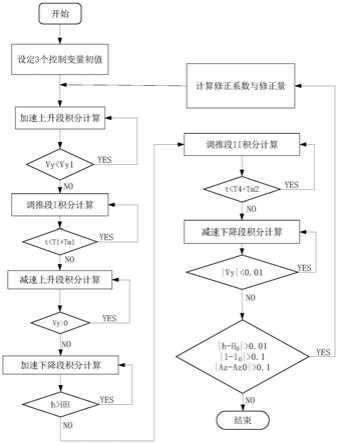
图2为本发明弹道计算法的流程示意图,图中的t为从起飞时刻开始的时间变量;h为从起飞时刻开始的弹道高度变量,随t变化而变化;vy
‑
发射系y向速度,vy1
‑
加速上升段结束发射系y向速度判断条件,hh
‑
加速下降段结束高度判断条件,h
‑
海拔高度,h0‑
落点海拔高度要求,l
‑
射程,l0‑
射程约束要求,az
‑
落点方位角,az0
‑
落点方位角约束要求;
[0043]
图3为垂直起降可重复使用运载器试验样机按本发明的弹道计算法设计的弹道飞行剖面图,图中调推段i即第一调推段,调推段ii即第二调推段。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0045]
本发明实施例提供一种垂直起降可重复使用运载器试验样机快速弹道迭代计算法,如图1所示,首先定义发射系:坐标原点o1与发射点固连,x轴在发射平面内,指向发射瞄准方向,y轴垂直于发射点水平面指向天向,z轴与x,y轴构成右手直角坐标系。
[0046]
射向角:射向角为发射瞄准方向与发射点正北方向的夹角,从y轴看顺时针为正。
[0047]
落点方位角:落点相对发射点的方向与发射点正北方向的夹角,从y轴看顺时针为正。
[0048]
如图2所示,本发明的试验样机快速弹道迭代计算法,包括以下步骤:
[0049]
步骤s1、确定约束量要求及精度要求;
[0050]
所述步骤s1的具体内容为:
[0051]
所述约束要求包括着陆点高度、速度、射程、落点方位角的要求,其中,末端高度约束要求为0m,精度要求为0.001m
‑
0.1m,优选为0.01m;末端速度要求为0m/s,精度要求为0.001m/s
‑
0.1m/s,优选为0.01m/s;射程精度要求为0.01m
‑
1m,优选为0.1m;落点方位角精度要求为0.01
°‑1°
,优选为0.1
°
。
[0052]
步骤s2、确定待迭代的各控制量;
[0053]
所述步骤s2的具体内容为:
[0054]
确定待迭代的控制量,首先将弹道分为加速上升段、第一调推段、减速上升段、加速下降段、第二调推段、减速下降段,其中减速返回段结束高度hh为控制量之一,hh用于控制落点高度使其满足落点高度精度要求;随后对弹道全程的姿态角进行设计,其中表征俯仰角的特征量为控制量之一,用于控制落点射程使其满足射程精度要求;射向角a0为第三个控制变量,a0用于控制落点方位角使其满足落点方位角精度要求,射向角定义为发射瞄准方向与发射点正北方向的夹角,落点方位角定义落点相对发射点的方向与发射点正北方向的夹角;
[0055]
在实际应用中,所述步骤s2中,
[0056]
所述加速上升段的结束判断条件为发射系y向速度达到特定值vy1,该值的设定与弹道顶点高度相关:此段结束时刻为t1(即图2中的t1);vy1和弹道顶点高度是单调递增的关系。
[0057]
所述第一调推段的时长tm1与发动机调整推力的性能以及推力调整量相关;此段结束时刻为t2;例如,发动机调整推力的性能如果为调整10%的推力需要1s的时间(设发动机额定推力(满推力)为p,发动机每秒可调节10%p),推力调整量由70%调整到50%,调整量为20%,那么时长tm1需要2
×
1s=2s;
[0058]
所述减速上升段结束判断条件为y向速度为0;此段结束时刻为t3;
[0059]
所述加速下降段结束判断条件为高度达到控制量hh;此段结束时刻为t4(即图2中的t4);
[0060]
所述第二调推段的时长tm2与发动机调整推力的性能以及推力调整量相关;此段结束时刻为t5;例如:设发动机额定推力(满推力)为p,发动机每秒可调节10%p,假如从70%p调整至50%p,则需要2s。
[0061]
所述减速下降段结束判断条件为y向速度为0,此段结束时刻为t6。
[0062]
各段结束的时刻按时间顺序为t1(即图2中的t1)、t2、t3、t4(即图2中的t4)、t5、t6。
[0063]
步骤s3、给控制量赋初值;
[0064]
所述步骤s3的具体内容为:
[0065]
给控制变量赋初值,所述初值可以使弹道迭代计算快速收敛;
[0066]
在实际应用中,具体地,所述步骤s3中给控制变量赋初值,当约束量(约束量包括射程,落点方位角,着陆速度为0其中垂直速度回零即为0(判断着陆标准)、侧向速度也回零即为0,高度为0)确定时,由于射向角与落点方位角定义方向一致、起始基准一致,所以将射向角初值定为与目标落点方位角azi0相等;减速返回段结束高度初值必定处于起飞点海拔高度h0和弹道顶点h
m
海拔高度之间,令hh=x
h
(h
m
‑
h0),其中x
h
∈(0,1),由于减速下降段结束的判断条件为y向速度为0m/s,如果x
h
太小,可能出现减速下降段结束时高度为负值的问题,此时无法求解有意义的大气参数,所以x
h
的取值区间定在(0.5,1.0)之间;特征量的初值取值范围为(0
°
,90
°
),可根据射程l(即图2中的l,l0是射程约束要求)要求进行选取,例如:对于50m射程可以取姿态角过大可能导致迭代发散的问题,较小的初值有利于迭代收敛。
[0067]
在实际应用中,无需设计控制量用于满足着陆点三个方向速度要求,将减速下降段的结束判断条件设置为发射系y向速度为0,通过俯仰角和偏航角ψ设计,令返回段火箭推力方向与速度方向相反,可使着陆时发射系x向、z向速度回0,由于滚转角不影响三自由度弹道计算,所以全程滚转角为0。
[0068]
所述姿态角包括俯仰角和偏航角ψ,具体设计内容为:
[0069]
在加速上升段:俯仰角为90
°
、偏航角为0
°
;
[0070]
在第一调推段:俯仰角从90
°
匀速过渡至偏航角为0
°
;
[0071]
在减速上升段:俯仰角为偏航角为0
°
;
[0072]
在加速下降段、第二调推段、减速下降段:俯仰角从匀速过渡至为保持箭体姿态稳定,角速率不宜过大,随后俯仰角保持飞行,计算弹道倾角θ和弹道偏角σ,当记录下该时刻从该时刻起,令返回段俯仰角程序如下式所示:
[0073][0074]
加速下降段和第二调推段偏航角为0
°
,减速下降段计算弹道偏角σ,令偏航角ψ=
‑
σ;
[0075][0076]
vx、vy、vz为发射系x、y、z向速度,v发射系速速,a没有意义,a与sin一起用,是反三角函数arcsin的意思。
[0077]
具体地,减速下降段,如果临近着陆速度过低,计算出的弹道倾角和弹道偏角可能出现较大跳变,处理方式为当速度小于0.1m/s的一瞬间,记录下当前姿态角ψ
f
,从该瞬间之后,令俯仰角和偏航角冻结在ψ
f
,直至y向速度达到0m/s。
[0078]
步骤s4、根据约束量与控制量之间的关系,确定修正系数;
[0079]
所述步骤s4的具体内容为:
[0080]
确定修正系数时,射向角与落点方位角、加速下降段结束高度与着陆高度单位相同且有较为明显的单调(单调递增或单调递减)关系,修正系数定为1;射程与的修正系数按照如下方式计算:每算完一条弹道,记录射程l与值,则修正系数为
[0081]
基本规则是火箭往哪边发射就往哪边返回着陆,落点方位角随着射向增加而单调递增。由于弹道顶点高度一定,加速下降段结束高度越高,则加速下降段结束时刻发射系y向速度vy越小,而调推段时长不变,则减速下降段开始时刻vy也越小,减速下降段从较小速度减速至速度为0,则该段起始的高度差也越小,则着陆时刻(发射系y向速度为o)的高度就越高,着陆高度随着加速下降段结束高度的增加而单调递增。
[0082]
步骤s5、根据修正系数,计算修正量,进行弹道迭代计算;
[0083]
具体地,所述步骤s5中进行弹道迭代计算时确定待迭代的各控制量时,不用各飞行段的时间作为控制量,而是分成六段飞行段分别用不同的更方便计算的物理量来做为控制量的:加速上升段、第一调推段、减速上升段、加速下降段、第二调推段、减速下降段,这六个段中的各个段推力不同,各个段的俯仰角不同,在初始时就确定了ao射向角但在整个过程中进行坐标系变换进行计算;在加速下降段将加速下降段结束的高度作为控制量hh。
[0084]
步骤s6、获得满足精度要求的弹道。
[0085]
如图2所示,具体地,弹道计算流程如下:
[0086]
首先给三个控制变量赋初值,随后开始加速上升段积分计算,直至发射系y向速度vy达到vy1,加速上升段结束,结束时刻为t1,程序进入第一调推段积分计算,当第一调推段时长达到tm1后,第一调推段结束,结束时刻为t2,程序进入减速上升段,当发射系y向速度为0,此时达到弹道顶点,减速上升段结束,结束时刻为t3,随后进入加速下降段积分计算,当高度h小于等于hh瞬间,加速下降段结束,结束时刻为t4,程序进入第二调推段积分计算,当第二调推段时长等于tm2时,第二调推段结束,结束时刻为t5,程序进入减速下降段积分
计算,当发射系y向速度vy的绝对值小于0.01m/s时,弹道积分计算结束,结束时刻t6。随后进行迭代计算,首先判断结束时刻t6时刻,三个约束量是否均满足精度要求,只要存在一个约束量不满足要求,就对所有控制量进行修正计算,并以此控制量重新进行上述弹道积分计算,当且仅当三个约束量同时满足精度要求,跳出迭代,获得满足精度要求的解。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1