一种低副瓣光相控阵快速设计方法与流程
1.本发明涉及一种低副瓣光相控阵快速设计方法,属于光天线阵列的优化设计方法技术领域。
背景技术:
2.光相控阵是工作在光频段的通过控制进入各个光天线单元的光的相位实现波束扫描的阵列。近年来,随着设计方法和工艺水平的进步,光相控阵正在成为人们研究的一个热点。相比于传统光束机械式扫描模式,光相控阵具有以下优势:(1)扫描速度快。全电控光束扫描与现有机械伺服扫描相比,具有扫描速度快的优势。(2)体积小、重量轻。光相控阵能够将激光光源、功率分配网络、移相器以及光天线阵列等核心器件高度集成到同一个芯片上,能够显著降低终端的体积和重量。因而,光相控阵在激光通信、激光雷达等领域具有广阔的应用前景。
3.目前国内外很多学者将研究聚焦在光相控阵的扫描速度、扫描范围以及波束宽度上,针对光相控阵低副瓣的研究相对较少,并且所设计的光相控阵普遍存在副瓣电平高的问题,难以满足实际的商业化应用。
4.专利光相控阵列、激光雷达及光功率分配方法(cn202010453091.x)在光相控阵的每条通道上加入检测控制模块,根据检测控制模块对各子通道光功率的检测结果,分配各个通道的光功率,解决了相控阵列功率分配不均衡。该发明涉及到幅度和相位的控制,但是没涉及到阵元间距分布的优化设计。专利一种基于铌酸锂薄膜的电光相控阵激光雷达(cn201910053528.8)基于铌酸锂材料的电光效应,改变波导模式间的相位差以实现对出射光角度的调控,这种电光相控阵具有扫描快速,便于扩展,结构紧凑等优点。该发明不涉及阵元间距分布的优化设计。专利宽范围扫描的宽带激光相控阵系统(cn201810558205.x)利用等离子体激元天线设计了一个宽带的等间距激光相控阵系统,该发明采用等间距分布,不涉及阵元间距分布的优化设计。专利一种基于热光开关和硅光相控阵的单波长多线扫描系统(cn201810240144.2)采用级联热光开关实现对不同光相控阵模块的选择和切换,器件上实现采用不同光栅周期的耦合光栅阵列辐射,最终效果上实现对波束仰角的控制,在另一维通过调控相位实现波束控制,该发明不涉及阵元间距分布的优化设计。专利一种有源光相控阵光子集成芯片及其制备方法(cn201611027155.x)通过控制多个激光器的相位实现波束的扫描,该发明仅涉及相位的控制,没涉及到阵列分布的优化设计。专利一种消偏振的激光相控阵波束扫描系统及方法(cn201610826779.1)利用液晶光相控阵设计了一个消偏振的波束扫描系统,该发明通过调控相位实现扫描,没涉及阵元分布和激励幅度的优化设计。专利一种激光相控阵多波束形成系统及方法(cn201610735859.6)通过精确控制液晶光相控阵的幅度和相位调制的方式,实现随机指向,该发明不涉及到阵元间距分布的优化设计。专利基于光相控阵实现激光束一维偏转与束散角缩放的方法(cn201510237952.x)通过液晶光相控阵给激光束调制一个同时具有线性分量和非线性分量的相位面,实现波束的偏转和发散角缩放,降低了系统的复杂性和功耗,增加了系统的灵活性,操作简便,该发明
涉及相位的设计,不涉及到阵元间距分布的优化设计。专利可动态连接的高功率光纤激光相控阵高速信息发射装置(cn201410160325.6)利用光纤放大器对每一路进行高功率放大,再相干合成,提高了通信距离,该发明不涉及到阵元间距分布的优化设计。专利双电控扫描激光相控阵雷达(cn201310721989.0)采用二维液晶调相器作为发射光束扫描装置,用二维微镜阵列作为视场扫描装置,实现瞬时发射视场和瞬时接收视场的匹配,该发明不涉及到阵元分布的优化设计。专利高速电光相控阵三维激光光束扫描器(cn200310122621.9)通过电控调节铌酸锂晶体阵列的相位实现波束扫描,这种阵列扫描速度快、精度高、没有机械运动、结构简单,该发明不涉及到阵元分布的优化设计。
5.非专利文献硅基非周期光相控阵天线的优化设计(optical letter,vol.46,no.4,2021,pp801
‑
804)利用基于机器学习的遗传算法优化阵元间距降低副瓣,并研究阵列制作误差对副瓣的影响,本文献涉及到优化阵元间距分布,但是不涉及激励分布的优化设计。非专利文献基于多层si3n4/sio2平台的非周期三维光相控阵优化(applied optics,vol.60,no.3,2021,pp484
‑
491)设计了一个基于si3n4/sio2平台的非周期三维光相控阵,基于机器学习的遗传算法优化阵元间距,并研究了光源误差对光相控阵性能的影响,本文献不涉及激励幅度和相位分布的优化设计。非专利文献基于粒子群算法的低副瓣宽角扫描光相控阵设计(asia communications and photonics conference,2020,ppm4a.138)利用粒子群优化算法通过两步分阶段优化阵元间距和相位实现降副瓣和宽角扫描,本文献不涉及激励幅度的优化设计。非专利文献用于稀疏光相控阵优化的多智能体遗传算法(asia communications and photonics conference,2019,ppm4a.286)在每次迭代中通过粗略优化和精确优化两个阶段优化阵元分布,提升了寻优的能力,本文献涉及阵元间距分布优化,不涉及激励幅度和相位的优化设计。非专利文献在误差存在下的非周期光相控阵波束扫描(optics express,vol.26,no.15,2018,pp19154
‑
19170)利用类似模式搜索算法优化阵元间距实现光相控阵的低副瓣设计,并研究误差对副瓣电平的影响,本文献不涉及激励幅度和相位的优化设计。非专利文献优化阵元间距分布抑制栅瓣的光相控阵(optics communications,vol.419,2018,pp47
‑
52)利用遗传算法优化阵元间距实现光相控阵的低副瓣设计,本文献不涉及激励幅度和相位的设计。
6.在国内外的报道中,未见到利用粒子群
‑
凸优化混合算法通过两步分别优化阵元间距和激励分布实现光相控阵的低副瓣宽角扫描的相关设计。
技术实现要素:
7.本发明解决的技术问题是:针对目前现有技术中,传统针对光相控阵低副瓣的研究相对较少、光相控阵普遍存在副瓣电平高且满足实际的商业化应用的问题,提出了一种低副瓣光相控阵快速设计方法。
8.本发明解决上述技术问题是通过如下技术方案予以实现的:
9.一种低副瓣光相控阵快速设计方法,步骤如下:
10.(1)建立天线阵列模型,天线阵列模型包括n个阵元,获取光相控阵的远场方向图表达式;
11.(2)根据步骤(1)所得光相控阵的远场方向图表达式,对光相控阵的阵元位置进行优化,并通过粒子群优化算法进行优化;
12.(3)在阵元位置优化确定的基础上,根据求解激励幅度及相位所需优化模型,获取最优二阶锥规划形式优化模型,通过凸优化算法进行优化,计算激励幅度并求解相位分布;
13.(4)根据优化后的光相控阵、激励幅度及相位分布情况,完成低副瓣宽角扫描的光相控阵设计。
14.所述步骤(1)中,光相控阵的远场方向图表达式具体为:
[0015][0016][0017]
式中,a
n
为第n个光天线单元的激励,d
m
为第m+1个阵元与第m个阵元的间距,x
n
为第n个阵元的位置。
[0018]
所述步骤(2)中,对光相控阵的阵元位置进行优化所需优化模型具体为:
[0019][0020]
式中,sll为副瓣电平,d
min
为最小的阵元间距约束,d
max
为最大的阵元间距约束,激励设置为常数。
[0021]
通过粒子群算法进行优化的具体步骤为:
[0022]
(2
‑
1)根据光相控阵任务需求进行初始化,具体为:设置搜索空间及速度区间,并设置种群规模和迭代次数;
[0023]
(2
‑
2)通过适应度函数对副瓣电平进行适应度评估;
[0024]
(2
‑
3)确定光相控阵粒子群中的个体极值与全局极值;
[0025]
(2
‑
4)对光相控阵粒子群中粒子速度与位置进行更新;
[0026]
(2
‑
5)根据预设约束条件,对更新后的各粒子位置及速度进行判断,若满足预设约束条件则进入步骤(2
‑
6),若不满足约束条件,则利用均匀分布随机产生一个满足预设约束条件的数值取代不满足预设约束条件的数值之后进入步骤(2
‑
6);
[0027]
(2
‑
6)重复步骤(2
‑
2)至步骤(2
‑
5),直至达到迭代次数,进入步骤(2
‑
7);
[0028]
(2
‑
7)获取光相控阵阵元分布,设激励幅度为1,根据激励相位分布表达式确定不同扫描状态下的远场方向图完成粒子群算法优化。
[0029]
所述步骤(2
‑
4)中,光相控阵粒子群中粒子速度与位置的更新公式为:
[0030][0031][0032]
式中,v为粒子的速度,x为粒子的位置,下标i为粒子序号,上标j为迭代次数,rand()为介于(0,1)之间的随机数,c1、c2为学习因子,ω为惯性因子,pbest
i
为个体极值,gbest
i
为全局极值。
[0033]
所述步骤(2
‑
7)中,不同扫描状态下的相位分布表达式具体为:
[0034][0035]
式中,θ
s
为指定的扫描角。
[0036]
求解激励幅度及相位所需优化模型具体为:
[0037][0038]
式中,为描述空间相位差的导向矢量,w=[w1,w1,
…
,w
n
]
t
为待优化便利,c为决定激励的动态范围的常数。
[0039]
在阵元位置分布确定的基础上,激励幅度和相位分布优化问题满足二阶锥规划形式,具体为:
[0040][0041]
式中,x∈r
n
为优化的变量,b∈r
n
,c
i
∈r
n
,d
i
∈r
n
,f∈c
h
×
n
,g∈c
h
×1。
[0042]
本发明与现有技术相比的优点在于:
[0043]
本发明提供的一种低副瓣光相控阵快速设计方法,基于粒子群
‑
凸优化混合算法通过两步分阶段优化阵元间距和激励分布实现光相控阵的低副瓣宽角扫描设计,可快速优化得到不同扫描角下激励分布,设计得到低副瓣宽角扫描光相控阵,可以广泛应用于激光通信、激光雷达系统中的光相控阵的设计,优化效果好、优化快速,可以快速实现低副瓣宽角扫描光相控阵的优化设计。
附图说明
[0044]
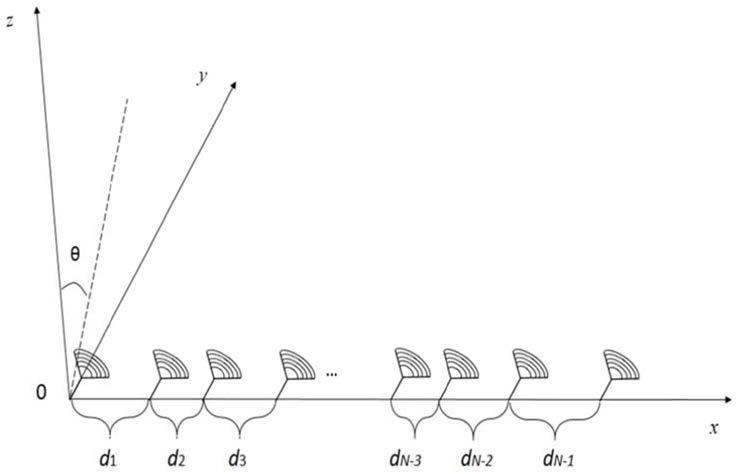
图1为发明提供的一维光相控阵模型示意图;
[0045]
图2为发明提供的优化阵元间距分布后远场方向图;
[0046]
图3为发明提供的进一步优化激励分布后扫描远场方向图;
具体实施方式
[0047]
一种低副瓣光相控阵快速设计方法,可以快速实现低副瓣宽角扫描光相控阵的优化设计,能够基于粒子群
‑
凸优化混合算法通过两步分阶段优化阵元间距和激励分布实现光相控阵的低副瓣宽角扫描设计,具有优化效果好、优化设计快速等优点,可广泛应用于激光通信、激光雷达等系统中低副瓣宽角扫描光相控阵领域,设计方法具体步骤如下:
[0048]
(1)建立天线阵列模型,天线阵列模型包括n个阵元,获取光相控阵的远场方向图表达式;
[0049]
其中,光相控阵的远场方向图表达式具体为:
[0050][0051][0052]
式中,a
n
为第n个光天线单元的激励,d
m
为第m+1个阵元与第m个阵元的间距,x
n
为第n个阵元的位置;
[0053]
(2)根据步骤(1)所得光相控阵的远场方向图表达式,对光相控阵的阵元位置进行优化,并通过粒子群优化算法进行优化;
[0054]
其中,对光相控阵的阵元位置进行优化所需优化模型具体为:
[0055][0056]
式中,sll为副瓣电平,d
min
为最小的阵元间距约束,d
max
为最大的阵元间距约束,激励设置为常数;
[0057]
通过粒子群算法进行优化的具体步骤为:
[0058]
(2
‑
1)根据光相控阵任务需求进行初始化,具体为:设置搜索空间及速度区间,并设置种群规模和迭代次数;
[0059]
(2
‑
2)通过适应度函数对副瓣电平进行适应度评估;
[0060]
(2
‑
3)确定光相控阵粒子群中的个体极值与全局极值;
[0061]
(2
‑
4)对光相控阵粒子群中粒子速度与位置进行更新;
[0062]
具体的,光相控阵粒子群中粒子速度与位置的更新公式为:
[0063][0064][0065]
式中,v为粒子的速度,x为粒子的位置,下标i为粒子序号,上标j为迭代次数,rand()为介于(0,1)之间的随机数,c1、c2为学习因子,ω为惯性因子,pbest
i
为个体极值,gbest
i
为全局极值;
[0066]
(2
‑
5)根据预设约束条件,对更新后的粒子位置及速度进行判断,若满足预设约束条件则进入步骤(2
‑
6),若不满足约束条件,则利用均匀分布随机产生一个满足约束的数值取代不满足约束的数值之后进入步骤(2
‑
6);
[0067]
(2
‑
6)重复步骤(2
‑
2)至步骤(2
‑
5),直至达到迭代次数,进入步骤(2
‑
7);
[0068]
(2
‑
7)获取光相控阵阵元分布,设激励幅度为1,根据激励相位分布表达式确定不同扫描状态下的远场方向图,完成粒子群算法优化;
[0069]
具体的,不同扫描状态下的相位分布表达式具体为:
[0070][0071]
式中,θ
s
为指定的扫描角;
[0072]
(3)在阵元位置优化确定的基础上,根据求解激励幅度和相位分布所需优化模型,
获取二阶锥规划形式优化模型,计算激励幅度并求解相位分布;
[0073]
其中,求解激励幅度和相位所需优化模型具体为:
[0074][0075]
式中,为描述空间相位差的导向矢量,w=[w1,w1,
…
,w
n
]
t
为待优化便利,c为决定激励的动态范围的常数;
[0076]
二阶锥规划形式优化模型具体为:
[0077][0078]
式中,x∈r
n
为优化的变量,b∈r
n
,c
i
∈r
n
,d
i
∈r
n
,f∈c
h
×
n
,g∈c
h
×1;
[0079]
(4)优化激励幅度和相位的模型属于二阶锥规划形式,证明优化激励幅度和相位是一个凸优化问题,通过采用凸优化算法进行快速求解得到激励幅度和相位分布。
[0080]
(5)根据优化后的光相控阵、激励幅度及相位分布情况,完成低副瓣宽角扫描的光相控阵设计。
[0081]
下面结合具体实施例进行进一步说明:
[0082]
本发明基于粒子群
‑
凸优化混合算法进行低副瓣光相控阵的设计。优化设计过程分为两步,具体优化的过程如下:首先利用粒子群优化算法求解光相控阵的阵元位置分布;在得到阵元间距分布的基础上,进一步利用凸优化算法快速求解光相控阵在不同扫描状态下的激励幅度和相位分布,提出利用粒子群优化算法求解最优的阵元间距分布,在得到阵元间距的基础上,提出采用凸优化算法优化不同扫描状态下的最优激励分布,本发明的设计方法对于阵元的数量没有限制,具有普遍适用性。
[0083]
本发明的设计方法具体步骤如下:
[0084]
基于粒子群
‑
凸优化混合算法通过两步分阶段优化阵元间距和激励分布实现光相控阵的低副瓣宽角扫描设计。首先建立天线阵列模型。设定天线阵列由n个阵元组成,光相控阵的远场方向图表达式为
[0085][0086][0087]
其中,a
n
是第n个光天线单元的激励,d
m
是第m+1个阵元与第m个阵元的间距,x
n
是第n个阵元的位置;
[0088]
根据上述建立的模型开展优化设计,具体的优化设计过程如下:
[0089]
第一步是对光相控阵的阵元位置进行优化,该最优化问题的数学模型可以表示
为:
[0090][0091]
其中,sll是副瓣电平,d
min
是最小的阵元间距约束,d
max
是最大的阵元间距约束,激励设置为常数。
[0092]
为了获取最优的阵元间距分布,采用粒子群优化算法,具体的优化步骤如下:
[0093]
(1)初始化。首先根据实际需要设置搜索空间和速度区间,并设置种群规模和迭代次数。
[0094]
(2)适应度函数的计算。为了衡量这些粒子在解决问题上的好坏,需要进行适应度评估,这里将副瓣电平用于适应度评估。
[0095]
(3)个体极值与全局极值。个体极值是每个粒子历史上最优的位置信息;从这些个体极值中找到的最优解就是全局极值。
[0096]
(4)更新粒子速度和位置的公式。更新公式为:
[0097][0098]
其中,v是粒子的速度,x是粒子的位置,下标i粒子序号,上标j是迭代次数,rand()是介于(0,1)之间的随机数,c1和c2是学习因子,ω称为惯性因子,pbest
i
是个体极值,gbest
i
是全局极值。
[0099]
粒子的位置和速度更新完成后,需要对粒子的位置和速度是否超出约束条件进行判断,针对越界问题利用均匀分布随机产生一个满足约束的数值。
[0100]
(5)终止条件。达到了最大的迭代次数。
[0101]
在得到阵元分布的基础上,假设激励幅度均为1,激励相位分布满足下式可以得到不同扫描状态下的远场方向图。
[0102][0103]
其中,θ
s
是指定的扫描角。
[0104]
通过粒子群优化算法优化阵元间距分布可以有效抑制栅瓣,降低在不扫描状态下的副瓣电平,但随着扫描角度的增大,按照上式的相位分布得到扫描状态下的远场方向图中的副瓣电平也会随之增大。因此需进一步优化不同扫描状态下的激励分布才能得到更低的副瓣电平。
[0105]
第二步是求解激励幅度和相位分布。在阵元位置确定的基础上,该最优化问题的数学模型可以表示为:
[0106]
[0107]
其中是描述空间相位差的导向矢量,w=[w1,w1,
…
,w
n
]
t
是需要优化的变量。c是一个常数,决定着激励的动态范围。
[0108]
研究人员已经证明了能写成二阶锥规划形式的优化问题是凸优化问题,二阶锥规划的形式如下:
[0109][0110]
其中x∈r
n
是优化的变量,b∈r
n
,c
i
∈r
n
,d
i
∈r
n
,f∈c
h
×
n
,g∈c
h
×1。
[0111]
在阵元位置分布确定的基础上,激励幅度和相位分布求解问题可以转化成二阶锥规划的形式,因此求解最优激励分布的问题是凸优化问题,这里采用凸优化算法进行快速求解。
[0112]
通过以上两步分阶段优化阵元间距和激励分布,可以快速得到低副瓣宽角扫描的光相控阵。
[0113]
具体的,如图1所示,为光相控阵模型的示意图。天线阵列由n个阵元组成,光相控阵的远场方向图表达式为
[0114][0115][0116]
其中a
n
是第n个光天线单元的激励,d
m
是第m+1个阵元与第m个阵元的间距,x
n
是第n个阵元的位置。
[0117]
根据上述建立的模型开展优化设计,具体的优化设计过程如下:
[0118]
首先第一步对光相控阵的阵元位置进行优化,该最优化问题的数学模型可以表示为:
[0119][0120]
其中,sll是副瓣电平,d
min
是最小的阵元间距约束,d
max
是最大的阵元间距约束,在优化中将阵元间距范围设置为0.8λ
‑
3λ,激励设置为a
n
=1,阵元规模设置为1024。
[0121]
为了获取最优的阵元间距分布,采用粒子群优化算法,具体的优化步骤如下:
[0122]
(1)初始化。这里将种群规模设置为150,迭代次数设置为3000。
[0123]
(2)适应度函数的计算。为了衡量这些粒子在解决问题上的好坏,需要进行适应度评估,这里将副瓣电平用于适应度评估。
[0124]
(3)个体极值与全局极值。个体极值是每个粒子历史上最优的位置信息;从这些个体极值中找到的最优解就是全局极值。
[0125]
(4)更新粒子速度和位置的公式。更新公式为:
[0126][0127]
其中,v是粒子的速度,x是粒子的位置,下标i粒子序号,上标j是迭代次数,rand()是介于(0,1)之间的随机数,学习因子c1和c2设置为2,惯性因子ω设置为0.9
‑
j0.5/3000,pbest
i
是个体极值,gbest
i
是全局极值。
[0128]
粒子的位置和速度更新完成后,需要对粒子的位置和速度是否超出约束条件进行判断,针对越界问题利用均匀分布随机产生一个满足约束的数值。
[0129]
(5)终止条件。达到了最大的迭代次数3000次就终止。
[0130]
在得到阵元分布的基础上,假设激励幅度均为1,当激励相位分布满足下式,可以得到不同扫描状态下的方向图。
[0131][0132]
其中,θ
s
是指定的扫描角。
[0133]
如图2所示,是通过优化阵元间距分布得到的1024阵元阵列的远场方向图,图2(a)是利用粒子群算法优化阵元间距得到的不扫描状态下的远场方向图,即在扫描角为θ
s
=0
°
时的阵列远场方向图,图2(b)是在不优化激励幅度和相位时,根据不同扫描状态下的远场方向图公式计算得到在20
°
扫描角下各个阵元的初始相位,最终获得的20
°
扫描角下的远场方向图。从图2可以看出,通过粒子群优化算法优化阵元间距分布可以有效降低不扫描状态下的副瓣,但是在其它的扫描角度副瓣电平明显抬升,因此需进一步优化不同扫描状态下的激励分布,才有可能进一步降低副瓣电平。
[0134]
接下来第二步是求解激励幅度和相位分布。在阵元位置确定的基础上,该最优化问题的数学模型可以表示为:
[0135][0136]
其中是描述空间相位差的导向矢量,w=[w1,w1,
…
,w
n
]
t
是需要优化的变量,c设置为5,这里采用凸优化算法进行快速求解。
[0137]
如图3所示,是在得到阵元分布的基础上进一步优化激励分布得到的扫描远场方向图。图3(a)是利用凸优化算法优化激励分布得到的扫描远场方向图,图3(b)是利用粒子群算法优化激励分布得到的扫描远场方向图。从图中可以看出利用凸优化算法进一步优化不同扫描角下的激励分布,实现了
±
60
°
的扫描范围,并且副瓣电平低于
‑
24.65db。相比于采用粒子群算法优化激励分布,副瓣降低了大约6db。粒子群优化算法是一种随机搜索算法,每次迭代需要计算150次目标函数(假设种群数量选取为150),并进行多次迭代更新,而我们所求解问题已证明为凸优化问题,利用凸优化问题的局部最优点即为全局最优点和强对偶性特性,在采用凸优化方法求解的优化过程中,通过引入拉格朗日乘子,将原问题转化
为拉格朗日函数求极值问题,沿着次梯度下降方向迭代寻优,通过公式推导与迭代寻优相结合的方法,相比于粒子群算法求解更加快速。
[0138]
从图2和图3的优化结果可知,利用此混合算法通过两步分阶段优化阵元间距和激励分布,可以快速得到低副瓣宽角扫描的光相控阵。
[0139]
本发明具有优化快速、优化效果好等优点,可广泛应用于激光通信、激光雷达等系统中低副瓣宽角扫描光相控阵的设计。
[0140]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0141]
本发明说明书中未作详细描述的内容属于本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1