头戴式显示设备及其定位装置的制作方法
1.本发明涉及一种头戴式显示设备及其定位装置,且特别涉及一种可因应使用者体型以进行校正的头戴式显示设备及其定位装置。
背景技术:
2.随着电子科技的进步,可呈现立体显示效果的头戴式显装置成为一种主流。
3.为了提升用户的体验感,电子系统中可提供外部装置(例如手把)以配合头戴式显装置来进行交互式操作。其中外部装置可发送超音波信号,而头戴式显装置上则配置多个传感器以接收外部装置所发送的超音波信号,据以进行三角定位运算以针对外部装置的位置进行定位。
4.在公知技术领域中,当头戴式显示设备上的传感器的至少其中之一的位置发生改变时,其所执行的三角定位运算将可能产生误差,进而无法正确的针对外部装置的位置进行定位。这样一来,使用者在进行交互式操作,可能产生手眼不协调的状况。
技术实现要素:
5.本发明是针对一种适用于头戴式显示装置的定位装置,可因应使用者的体型,来校正定位的结果。
6.根据本发明的实施例,定位装置适用于头戴式显示设备。定位装置包括第一传感器、第二传感器、第三传感器、第一枢纽传感器以及控制器。第一传感器以及一第二传感器设置在头戴式显示设备的本体部的第一区域中,其中第一传感器以及第二传感器具有固定的相对位置。第三传感器设置在头戴式显示设备的第一可挠性部件上。第一枢纽传感器设置在头戴式显示设备上用以连接本体部以及第一可挠性部件的第一连接部上,其中第一枢纽传感器用以感测第一可挠性部件的第一移动状态。控制器耦接第一枢纽传感器、第一传感器、第二传感器以及第三传感器,用以计算第一传感器、第二传感器以及第三传感器的第一相对位置信息,并根据第一移动状态以校正第一相对位置信息。
7.根据本发明的实施例,头戴式显示设备包括本体部、第一可挠性部件、第一连接部以及定位装置。第一连接部用以连接本体部与第一可挠性部件。定位装置包括第一传感器、第二传感器、第三传感器、第一枢纽传感器以及控制器。第一传感器以及第二传感器设置在头戴式显示设备的本体部的第一区域中,其中第一传感器以及第二传感器具有固定的相对位置。第三传感器设置在第一可挠性部件上。第一枢纽传感器设置在第一连接部上,用以感测第一可挠性部件的第一移动状态。控制器耦接第一枢纽传感器、第一传感器、第二传感器以及第三传感器,用以计算第一传感器、第二传感器以及第三传感器的第一相对位置信息,并根据第一移动状态以校正第一相对位置信息。
8.根据上述,本发明通过在头戴式显示设备中,用以连接的可挠性部件以及本体部间的连接部上设置枢纽传感器。使枢纽传感器感测可挠性部件的移动状态,并通过可挠性部件的移动状态来针对第一传感器、第二传感器以及第三传感器的相对位置进行校正。如
此一来,在当可挠性部件因不同使用者的配戴而生不同的移动信息时,定位装置可有效的针对第一传感器、第二传感器以及第三传感器的相对位置进行校正。当定位装置针对外部装置的位置进行侦测时,可有效维持侦测结果的正确度。
附图说明
9.包含附图以便进一步理解本发明,且附图并入本说明书中并构成本说明书的一部分。附图说明本发明的实施例,并与描述一起用于解释本发明的原理。
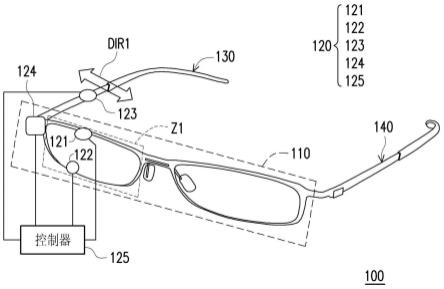
10.图1为本发明一实施例的头戴式显示设备的示意图;
11.图2a至图2c为本发明实施例中,可挠性部件的移动状态的侦测动作的一实施方式的示意图;
12.图3a至图3c为本发明实施例中,可挠性部件的移动状态的侦测动作的另一实施方式的示意图;
13.图4为本发明另一实施例的头戴式显示设备的示意图;
14.图5为本发明实施例的头戴式显示设备的定位动作的流程图。
15.附图标号说明
16.100、400:头戴式显示设备;
17.110、410:本体部;
18.120、420:定位装置;
19.121~123、421~423、426~428:传感器;
20.124、424、429:枢纽传感器;
21.125、425:控制器;
22.130、140、430、440:可挠性部件;
23.a1、a2:夹角;
24.c1:连接部;
25.dir1:方向;
26.ra:参考轴;
27.s1:弹性物件;
28.s510~s540:定位动作的步骤。
具体实施方式
29.现将详细地参考本发明的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同元件符号在图式和描述中用来表示相同或相似部分。
30.请参照图1,图1为本发明一实施例的头戴式显示设备的示意图。头戴式显示设备100为三维显示设备,并可呈现虚拟现实(virtual reality,vr)、扩增实境(augmented reality,ar)或混合实境(mixed reality,mr)的显示效果。本实施例中,头戴式显示设备100具有本体部110、可挠性部件130以及140以及定位装置120。在本实施例中,本体部110可具有第一眼显示器以及第二眼显示器。可挠性部件130以及140则分别通过第一连接部以及第二连接部,以分别耦接至第一眼显示器以及第二眼显示器。其中头戴式显示设备100可以设置为眼镜的型态,可挠性部件130以及140则可以为两个镜脚。
31.在另一方面,定位装置120包括传感器121~123、枢纽(hinge)传感器124以及控制器125。传感器121以及122设置在本体部110中的第一区域z1中。例如,传感器121以及122可分别设置在本体部110中的第一眼显示器的上方以及下方的两个不同的位置上。其中传感器121以及传感器122具有固定的相对位置。另外,传感器123则可设置在可挠性部件130上。其中传感器121、传感器122以及传感器123可以连接成一个三角形。另外,枢纽传感器124设置在用以连接可挠性部件130以及本体部110间的连接部上,并用以侦测可挠性部件130的移动状态。
32.此外,控制器125耦接至传感器121~123以及枢纽传感器124。在初始状态下,控制器125可根据传感器121~123的默认位置来获得传感器121~123间的相对位置信息。在实际的使用时,用户所持有外部装置(手把)可发送出无线信号,定位装置125中的传感器121~123则可分别接收上述的无线信号,并根据所接收到的无线信号的强度,来分别获得外部装置与传感器121~123间的距离信息。接着,控制器125可以根据上述的距离信息以执行三角定位运算,并获得外部装置的位置信息。
33.在本实施例中,在使用者配戴头戴式显示设备100时,作为镜脚的可挠性部件130可能因为使用者的头型及/或使用者的头的尺寸大小不相同,而产生在方向dir1上的移动。这个可挠性部件130在方向dir1上的移动,会使得传感器123的位置,与原先默认的位置产生差异。在此,枢纽传感器124可侦测可挠性部130的移动状态。控制器125则可根据挠性部130的移动状态来重新计算传感器121~123间的相对位置关系。如此一来,根据传感器121~123校正后的传感器121~123间的相对位置关系,定位装置120可维持外部装置的定位动作的准确度,并维持头戴式显示设备100的表现度。
34.在本实施例中,传感器121~123可以为超音波接收器,用以接收外部装置所发送的为超音波信号的无线信号。在本发明其他实施例中,外部装置也可发送其他种类的无线信号,传感器121~123则可以为相对应的无线信号接收器,没有一定的限制。
35.本实施例中的控制器125可以通过有线的方式与传感器121~123以及枢纽传感器124进行耦接。控制器125可以为具运算能力的处理器。或者,控制器125可以是通过硬件描述语言(hardware description language,hdl)或是其他任意本领域普通技术人员所熟知的数字电路的设计方式来进行设计,并通过现场可编程逻辑门阵列(field programmable gate array,fpga)、复杂可编程逻辑装置(complex programmable logic device,cpld)或是特殊应用集成电路(application-specific integrated circuit,asic)的方式来实现的硬件电路。
36.以下请同步参照图1以及图2a至图2c,其中图2a至图2c为本发明实施例中,可挠性部件的移动状态的侦测动作的一实施方式的示意图。在图2a中,本体部110通过连接部c1以与可挠性部件130相互连接。连接部c1可以是一个旋转轴,并与枢纽传感器124相互耦接。连接部c1可具有一参考轴ra,在图2a中,在初始状态下,连接部c1的参考轴ra与可挠性部件130的法线向量相互平行(夹角为0度)。
37.在图2b中,当可挠性部件130产生外扩的移动时,连接部c1可产生旋转,并使参考轴ra与在初始状态下的可挠性部件130的法线向量产生一夹角a1(其中夹角a1大于0度)。此时,枢纽传感器124可根据夹角a1来获得连接部c1的转动角度。控制器125则可根据连接部c1的转动角度来计算出传感器123的移动状态。
38.举例来说明,控制器125可根据传感器123在可挠性部件130上的位置以及夹角a1来计算出传感器123的移动状态。
39.在图2c中,当可挠性部件130产生内缩的移动时,连接部c1同样可产生旋转,并使参考轴ra与在初始状态下的可挠性部件130的法线向量产生一夹角a2(其中夹角a2小于0度)。此时,枢纽传感器124可根据夹角a2来获得连接部c1的转动角度。控制器125则可根据连接部c1的转动角度以及传感器123在可挠性部件130上的位置来计算出传感器123的移动状态。
40.以下请同步参照图1以及图3a至图3c,其中图3a至图3c为本发明实施例中,可挠性部件的移动状态的侦测动作的另一实施方式的示意图。在图3a中,本体部110通过连接部c1以与可挠性部件130相互连接。连接部c1具有弹性物件s1,并通过弹性物件s1与枢纽传感器124相互耦接。在图3a中,在初始状态下,连接部c1的弹性物件s1具有一初始状态。
41.在图3b中,当可挠性部件130产生外扩的移动时,弹性物件s1可对应被拉长,并产生一第一形变状态。此时,枢纽传感器124可根据第一形变状态来获得连接部c1的转动角度,并根据传感器123在连接部c1的转动角度以及传感器123在可挠性部件130上的位置来计算出传感器123的移动状态。
42.在图3c中,当可挠性部件130产生内缩的移动时,弹性物件s1可对应被压缩,并产生一第二形变状态。此时,枢纽传感器124可根据第二形变状态来获得连接部c1的转动角度。控制器125则可根据连接部c1的转动角度以及传感器123在可挠性部件130上的位置来计算出传感器123的移动状态。
43.以下请参照图4,图4为本发明另一实施例的头戴式显示设备的示意图。本实施例中,头戴式显示设备400具有本体部410、可挠性部件430以及440以及定位装置420。在本实施例中,本体部410可具有第一眼显示器以及第二眼显示器。可挠性部件430以及440则分别通过第一连接部以及第二连接部,以分别耦接至第一眼显示器以及第二眼显示器。其中头戴式显示设备400可以设置为眼镜的型态,可挠性部件430以及440则可以为两个镜脚。
44.在另一方面,定位装置420包括传感器421~423、426~428、枢纽(hinge)传感器424、429以及控制器425。传感器421以及422设置在本体部410中的第一区域中。例如,传感器421以及422可分别设置在本体部410中的第一眼显示器的上方以及下方的两个不同的位置上。其中传感器421以及传感器422具有固定的相对位置。传感器426以及427则可分别设置在本体部410中的第二眼显示器的上方以及下方的两个不同的位置上。其中传感器426以及传感器427具有固定的相对位置。
45.另外,传感器423、428则可分别设置在可挠性部件430以及440上。其中传感器421、传感器422以及传感器423可以连接成一个三角形,以及传感器426、传感器427以及传感器428则可以连接成另一个三角形。另外,枢纽传感器424设置在用以连接可挠性部件430以及本体部410间的连接部上;枢纽传感器429则设置在用以连接可挠性部件440以及本体部410间的连接部上。枢纽传感器424、429并分别用以侦测可挠性部件430以及可挠性部件440的移动状态。
46.控制器425耦接至传感器421~423、426~428以及枢纽传感器424及429,并用以执行传感器421~423间的相对位置信息以及传感器426~428间的相对位置信息的计算以及校正动作。控制器425并可用以执行外部装置的定位动作。
47.关于上述相对位置信息的计算以及校正动作,以及外部装置的定位动作的动作细节,在前述的实施例以及实施方式都已有详细的说明,在此恕不多赘述。
48.请参照图5,图5为本发明实施例的头戴式显示设备的定位动作的流程图。在步骤s510中,头戴式显示器中用以连接本体部以及可挠性部件(镜脚)的连接部上的枢纽传感器侦测镜脚的位置的变化量(=x)。接着,在步骤s520中,头戴式显示设备可针对设置在镜脚上的传感器的位置,依据变化量(=x)进行补偿。接着,在步骤s530中,头戴式显示设备可重新定义本体部以及镜脚上的三个传感器的相对位置。并且在步骤s540中,传感器接收手把(外部装置)传送的超音波信号,以通过补偿过的三个传感器的相对位置来做三角定位运算,并经以定位出手把的位置。
49.关于上述步骤s510~s540的实施细节,在前述多个实施例以及实施方式中已有详细的说明,在此恕不多赘述。
50.综上所述,本发明头戴式显示设备中,通过定位装置中设置在本体部及可挠性部件间的连接部上的枢纽传感器,以通过感测可挠性部件发生的移动状态,来获得可挠性部件上的传感器的移动状态,并通过可挠性部件上的传感器的移动状态来校正定位装置中三个传感器间的相对位置信息。如此一来,当可挠性部件对应不同使用者产生不同的位移时,头戴式显示设备可维持外部装置定位动作的正确性,有效维持头戴式显示设备的表现度。
51.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1