一种基于计算机视觉的结构大运动快速测量方法
1.本发明属于结构振动测量技术领域,特别涉及一种基于计算机视觉的结构大运动快速测量方法。
背景技术:
2.计算机视觉方法作为一种新型的非接触式结构运动测量方法被逐渐应用于工业领域,因此发展高效、快捷的计算机视觉运动测量方法具有重要的意义。
3.模板匹配方法是作为一种基于计算机视觉的结构运动测量方法,具有非接触、空间高分辨率、高精度的优势。该方法通过对结构表面进行散斑处理,采用相机获取结构运动的视频图像,利用视频图像像素的灰度信息,建立相关函数和模板,并设定搜索区域,通过在搜索区域内进行模板相关性计算来获取结构的运动信息。然而,在实际应用中,尤其对于结构大运动,使用全局大小相同的搜索区域会导致模板匹配效率低,从而降低了该方法的测量效率,难以满足实际工程需要。
技术实现要素:
4.为解决当前模板匹配方法使用全局大小相同的搜索区域,导致测量结构大运动时效率低的问题,本发明提供一种基于计算机视觉的结构大运动快速测量方法,为了实现上述目的,本发明采用的技术方案是:
5.步骤1),对结构上需要测量的位置进行散斑处理,利用相机对结构的运动进行视频记录,将初始帧图像划分成若干个子域;
6.步骤2),选择任意一个子域作为模板,建立关于模板的零均值归一化互相关函数,对下一帧图像进行全局搜索,计算模板在下一帧图像内不同位置处的相关性,通过相关性最大的位置得到模板在下一帧图像中的整数像素坐标;
7.步骤3),以当前帧模板的整数像素坐标为中心,采用曲面拟合方法对小邻域范围3
×
3内整数像素的相关系数进行曲面拟合,计算曲面上的极值,得到当前帧模板的亚像素坐标;
8.步骤4),利用模板在相邻两帧间的位移确定下一帧图像中搜索区域的大小;
9.步骤5),重复步骤(2)~(4),获取不同模板在不同帧图像中的亚像素坐标位置,对结构的运动进行测量。
10.进一步地,所述步骤2)具体为,建立关于模板的零均值归一化互相关函数,对下一帧图像进行全局搜索,计算模板在下一帧图像内不同位置处的相关性,通过相关性最大的位置得到模板在下一帧图像中的整数像素坐标。
11.记f(x,y)为初始帧图像在(x,y)位置处的灰度,g(x,y)为下一帧图像在(x,y)位置处的灰度,在初始帧图像中选择大小为w的模板。
12.fm为模板内像素的灰度平均值,表示为:
[0013][0014]gm
为下一帧图像中待匹配区域内像素的灰度平均值,表示为:
[0015][0016]
本发明中,构建的零均值归一化互相关函数表示为:
[0017][0018]
p为模板在下一帧图像中的相关性计算结果,当p=1时,表示模板和待匹配区域完全相关。
[0019]
进一步地,所述步骤3)具体为,以当前帧模板的整数像素坐标为中心,采用曲面拟合方法对小邻域范围3
×
3内整数像素的相关系数进行曲面拟合,计算曲面上的极值,得到当前帧模板的亚像素坐标。
[0020]
设小邻域范围3
×
3内整数像素的相关系数满足如下曲面方程:
[0021]
c(x,y)=a0+a1x+a2y+a3x2+a4xy+a5y2[0022]
采用最小二乘法对方程进行求解,确定相关系数a0,a1,a2,a3,a4,a5,对该曲面进行表征。
[0023]
由于曲面方程中的极值点为相关性最大的位置,所以曲面方程极值点即为模板亚像素坐标。
[0024]
曲面方程c(x,y)极值点满足:
[0025][0026][0027]
模板亚像素坐标为:
[0028][0029]
进一步地,所述步骤4)具体为,利用模板在相邻两帧间的运动确定下一帧图像中搜索区域的大小。
[0030]
设第i帧时模板的整数像素坐标为(xi,yi),第i+1帧时模板的整数像素坐标为(x
i+1
,y
i+1
),结构的运动描述为:
[0031][0032]
通过结构的运动,确定下一帧图像中搜索区域在水平和竖直方向上的大小ω
x
和ωy为:
[0033][0034]
式中:w
x
、wy分别为模板在水平和竖直方向上的大小。
[0035]
与现有模板匹配测量方法相比,本发明具有的优点如下:
[0036]
1)测量效率高,所提出的方法能够实现对搜索区域大小的自适应控制,在有效区域内进行模板的相关性进行计算。
[0037]
2)测量精度高,通过相关函数曲面的极值计算方法,能够获取结构的亚像素运动。
附图说明
[0038]
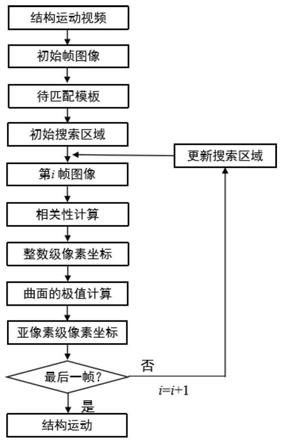
图1为本发明所提出的动搜索区域模板匹配流程示意图;
[0039]
图2为模板在搜索区域匹配与基于相关系数矩阵二次曲面拟合的亚像素运动求解示意图。
具体实施方式
[0040]
下面结合附图和实施例详细说明本发明的实施方式。
[0041]
如图1所示,本发明为一种基于计算机视觉的结构大运动快速测量方法,包括以下步骤:
[0042]
步骤1:对结构上需要测量的位置进行散斑处理,利用相机对结构的运动进行视频记录,将初始帧图像划分成若干个子域。
[0043]
步骤2:如图2所示,选择任意一个子域作为模板,建立关于模板的零均值归一化互相关函数,对下一帧图像进行全局搜索,计算模板在下一帧图像内不同位置处的相关性,通过相关性最大的位置得到模板在下一帧图像中的整数像素坐标。
[0044]
本发明中,记f(x,y)为初始帧图像在(x,y)位置处的灰度,g(x,y)为下一帧图像在(x,y)位置处的灰度,在初始帧图像中选择大小为w的模板。
[0045]fm
为模板内像素的灰度平均值,表示为:
[0046][0047]gm
为下一帧图像中待匹配区域内像素的灰度平均值,表示为:
[0048][0049]
本发明中,构建的零均值归一化互相关函数表示为:
[0050][0051]
p为模板在下一帧图像中的相关性计算结果,当p=1时,表示模板和待匹配区域完全相关,
[0052]
步骤3:以当前帧模板的整数像素坐标为中心,采用曲面拟合方法对小邻域范围3
×
3内整数像素的相关系数进行曲面拟合,计算曲面上的极值,得到当前帧模板的亚像素坐标。
[0053]
本发明中,设小邻域范围3
×
3内整数像素的相关系数满足如下曲面方程:
[0054]
c(x,y)=a0+a1x+a2y+a3x2+a4xy+a5y2ꢀꢀ
(4)
[0055]
采用最小二乘法对方程进行求解,确定相关系数a0,a1,a2,a3,a4,a5,对该曲面进行表征。
[0056]
由于曲面方程中的极值点为相关性最大的位置,所以曲面方程极值点即为模板亚像素坐标。
[0057]
曲面方程c(x,y)极值点满足:
[0058][0059][0060]
模板亚像素坐标为:
[0061][0062]
步骤4:利用模板在相邻两帧间的位移确定下一帧图像中搜索区域的大小。
[0063]
本发明中,设第i帧时模板的整数像素坐标为(xi,yi),第i+1帧时模板的整数像素坐标为(x
i+1
,y
i+1
),结构的运动描述为:
[0064][0065]
通过结构的运动,确定下一帧图像中搜索区域在水平和竖直方向上的大小ω
x
和ωy为:
[0066][0067]
式中:w
x
、wy分别为模板在水平和竖直方向上的大小。
[0068]
步骤5:重复步骤(2)~(4),获取不同模板在不同帧图像中的亚像素坐标位置,对结构的运动进行测量。
[0069]
为验证本发明所提出方法的有效性,利用本发明所提出的方法对地震波作用下的楼房结构的运动进行测量,表1为所提出方法与lvdt传感器测量结果在水平与竖直方向上的pearson相关系数,分别为98.4%和98.5%,证明所提出的方法具有高的测量精度。表2为所提出的方法与现有的不同搜索区域的模板匹配方法测量结构时的测量效率对比,从图中可以看出,与现有的模板匹配方法相对比,本发明提出的测量方法具有较高的测量效率。
[0070]
表1与lvdt传感器在水平和竖直方向上的精度对比
[0071] 水平方向竖直方向测量精度(pearson系数)98.7%98.5%
[0072]
表2不同类型的模板匹配方法测量效率对比
[0073]
类型原始裁剪区域40区域30区域20动区域区域大小(pixel)482*460150*20040*4030*3020*20 计算时长(s)327.95354.953.181.850.52
[0074]
由此可见,本发明所提出的方法能够根据结构的实际运动调整搜索区域的大小,相较于以往全局统一大小的搜索区域,能有效的提升模板匹配方法在测量结构大运动的测量效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1