地图管理方法、装置及计算机可读存储介质与流程
1.本技术涉及数据管理技术领域,特别是涉及地图管理方法、装置及计算机可读存储介质。
背景技术:
2.现有技术中,在进行地图更新时,通常会获取得到需要更新的地图区域数据,之后再在地图数据中查找相应位置的需要删除的数据,并将相应位置的需要删除的数据删除,以进行地图的更新。
3.现有技术的缺陷在于,在地图数据中查找相应位置的需要删除的数据的时候,只能基于需要更新的地图区域数据确定需要删除的数据,而需要删除的数据的一部分可能与未删除的数据存在一定的关联性,使得在将需要删除的数据删除后,影响地图的连贯度。此外,基于需要更新的地图区域数据确定需要删除的数据的过程中,需要的计算量较大,效率较低。因此,现有的地图管理方法的可靠性和管理效率均较低。
技术实现要素:
4.本技术主要解决的技术问题是如何提高地图管理方法的可靠性和管理效率。
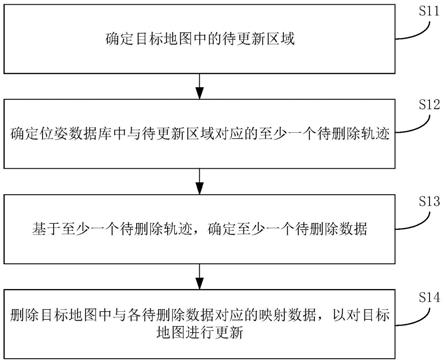
5.为了解决上述技术问题,本技术采用的第一个技术方案是:一种地图管理方法,包括:确定目标地图中的待更新区域;确定位姿数据库中与待更新区域对应的至少一个待删除轨迹;基于至少一个待删除轨迹,确定至少一个待删除数据,其中,待删除数据为与待删除轨迹对应的原始建图数据;删除目标地图中与各待删除数据对应的映射数据,以对目标地图进行更新。
6.为了解决上述技术问题,本技术采用的第二个技术方案是:一种地图管理装置,包括:存储器和处理器;存储器用于存储程序指令,处理器用于执行程序指令以实现上述地图管理方法。
7.为了解决上述技术问题,本技术采用的第三个技术方案是:一种计算机可读存储介质,计算机可读存储介质存储有程序指令,程序指令被处理器执行时实现上述地图管理方法。
8.本技术的有益效果在于:区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
附图说明
9.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1是本技术地图管理方法的第一实施例的流程示意图之一;
11.图2是本技术地图管理方法的第一实施例的流程示意图之二;
12.图3是本技术地图管理方法的第一实施例的流程示意图之三;
13.图4是本技术地图管理方法的第一实施例的流程示意图之四;
14.图5是本技术地图管理方法的第二实施例的流程示意图;
15.图6是本技术地图管理方法的第三实施例的流程示意图;
16.图7是本技术地图管理方法的第四实施例的流程示意图;
17.图8是本技术地图管理装置的一实施例的结构示意图;
18.图9是本技术计算机可读存储介质的一实施例的结构示意图。
具体实施方式
19.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本技术保护的范围。
20.本技术中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
21.本技术首先提出一种地图管理方法,如图1所示,图1是本技术地图管理方法的第一实施例的流程示意图之一,地图管理方法具体可包括:
22.步骤s11:确定目标地图中的待更新区域。
23.其中,可使服务器基于接收到的由客户端发送的更新指令,确定目标地图中的待更新区域。
24.客户端可以是任意类型的电子设备,例如:车载地图导航设备、手机、电脑等,此处不作限定。更新操作指令中可包括:基础地图信息、地图更新信息和其它更新所需的信息,基础地图信息包括基于该更新指令所要修改的地图的版本号等信息,地图更新信息包括要进行更新的待更新区域的相关信息。
25.步骤s12:确定位姿数据库中与待更新区域对应的至少一个待删除轨迹。
26.其中,位姿数据库中存放有用于构建各版本地图的全部轨迹。
27.可使服务器基于目标地图确定所述位姿数据库中与目标地图的版本号对应的全部轨迹,再进一步从目标地图对应的全部轨迹中筛选出与待更新区域对应的至少一个待删
除轨迹。
28.步骤s13:基于至少一个待删除轨迹,确定至少一个待删除数据。
29.其中,待删除数据为与待删除轨迹对应的原始建图数据。
30.可使服务器基于待删除轨迹和待删除轨迹的对应关系,查找到建图数据库中的对应原始建图数据。
31.具体的,若该至少一个待删除轨迹中,存在一待删除轨迹是完整轨迹中的部分轨迹,则在基于该待删除轨迹确定相应的待删除数据时,确定该部分轨迹所对应的部分原始建图数据以作为待删除数据。
32.步骤s14:删除目标地图中与各待删除数据对应的映射数据,以对目标地图进行更新。
33.其中,可使服务器基于该至少一个待删除数据,确定目标地图中,各待删除数据参与构建的映射数据,之后将目标地图中各待删除数据对应的映射数据全部删除,即可完成目标地图的更新。
34.需要说明的是,各原始建图数据为基于移动测量设备获得的雷达数据,以设置于车辆上的车载雷达为例,举例说明如下:
35.使车辆从地点a行驶到地点b,行驶过程中开启车辆上的车载激光雷达,以记录地点a到地点b所探测到的雷达数据,记作地点a到地点b的原始建图数据。
36.可基于该原始建图数据,确定车辆在从地点a行驶到地点b的过程中,各时刻下的位置信息和各时刻下的方向信息,记作地点a到地点b的轨迹。
37.将地点a到地点b的原始建图数据存入相应的建图数据库,将地点a到地点b的轨迹存入相应的位姿数据库,并记录二者的对应关系。
38.进一步说明地图的构建,举例说明如下:
39.在对一个区域进行地图的构建时,可先确定该区域所涉及的全部轨迹,之后可调用该区域所涉及的全部轨迹所对应的原始建图数据,最后基于各轨迹及对应的原始建图数据,构建该区域的地图。其中,构建地图的具体方式可以包括数据拼接、叠加或采用其它建图算法中的一种或多种,此处不作限定。
40.不同版本的地图所对应的全部轨迹中,可能存在相同的轨迹,也可能不存在相同的轨迹,具体根据不同版本的地图之间的更新历史而定,此处不作限定。
41.地图具体可以是点云地图,点云地图一般由若干三维空间点组成,每个点包括其在utm(universal transverse mercator grid system,通用横墨卡托格网系统)坐标下的三维位置信息和一些其他辅助信息。
42.具体的,位姿数据库可以是热数据区,建图数据库可以是冷数据区,位姿数据库被访问的频次通常较高,而建图数据库通常仅在需要对地图进行构建、删除、增加、更新等操作时才需要访问,频次较低,因此,将位姿数据库和建图数据库分别划分入对应数据区可以提高存储资源的利用合理性。
43.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应
的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
44.可选的,如图2所示,图2是本技术地图管理方法的第一实施例的流程示意图之二,步骤s11-14与图1所示流程相同,在步骤s14后,地图管理方法还包括:
45.步骤s15:获取与待更新区域对应的待更新轨迹,以及,与待更新轨迹对应的原始建图数据。
46.其中,可使服务器基于所接收到的更新指令,确定更新指令所指示的待更新区域,和待更新区域所对应的待更新轨迹及相应原始建图数据,以备后续步骤中使用。
47.步骤s16:将待更新轨迹、待更新轨迹与相应原始建图数据的对应关系存储到位姿数据库中。
48.其中,可使服务器将待更新轨迹、待更新轨迹与相应原始建图数据的对应关系存储到位姿数据库中,并将原始建图数据、待更新轨迹与相应原始建图数据的对应关系存储到建图数据库中。
49.步骤s17:将与待更新轨迹对应的原始建图数据,映射到待更新区域中,以在待更新区域中添加相应的映射数据。
50.其中,可使服务器基于待更新轨迹及相应的原始建图数据,构建出待更新区域的区域数据,并将该区域数据映射到目标地图中,以使目标地图更新为更新版本的地图。
51.具体的,基于上述方式,不仅可以完成目标地图的数据的更新,还可将更新所用轨迹及相应原始建图数据的对应关系记录起来,以备后续需要删除相关轨迹及对应地图数据时使用,使得地图数据的管理更有条理,进一步提高了地图管理方法的可靠性和管理效率。
52.可选的,如图3所示,图3是本技术地图管理方法的第一实施例的流程示意图之三,地图管理方法还包括:
53.步骤s21:确定目标原始建图数据。
54.其中,可使服务器基于接收到的由客户端发送的第一下载指令,确定第一下载指令所指示的目标原始建图数据。
55.步骤s22:基于目标原始建图数据,确定并向客户端发送位姿数据库中,与目标原始建图数据对应的至少一个待下载轨迹。
56.其中,一目标原始建图数据可包括多个原始建图数据,故可使服务器基于目标原始建图数据,确定与目标原始建图数据对应的至少一个待下载轨迹,最后将该至少一个待下载轨迹发送给客户端,完成下载流程。
57.可基于上述方式,快速确定所要下载的轨迹,提高了地图管理的效率。
58.可选的,如图4所示,图4是本技术地图管理方法的第一实施例的流程示意图之四,地图管理方法还包括:
59.步骤s31:确定目标地图中的目标区域。
60.其中,可使服务器基于接收到的由客户端发送的第二下载指令,确定第二下载指令所指示的目标区域。
61.步骤s32:基于目标区域,确定并向客户端位姿数据库中,与目标区域对应的至少一个待下载轨迹,以及与各待下载轨迹对应的原始建图数据。
62.其中,可使服务器基于目标区域,确定目标区域所涉及的至少一个待下载轨迹,之后基于该至少一个待下载轨迹确定各待下载轨迹所对应的原始建图数据,最后将该至少一个待下载轨迹及相应原始建图数据发送给客户端,完成下载流程。
63.可基于上述方式,快速确定所要下载的轨迹及原始建图数据,提高了地图管理的效率。
64.本技术还提出一种地图管理方法,步骤s11-14与图1所示流程相同,此处不再赘述。如图5所示,图5是本技术地图管理方法的第二实施例的流程示意图,地图管理方法还包括:
65.步骤s41:确定位姿数据库中与目标地图所对应的全部建图轨迹。
66.其中,可使服务器基于目标地图的版本号,确定该版本的地图所对应的全部建图轨迹。
67.步骤s42:确定与各建图轨迹所对应的更新时间。
68.其中,可使服务器获取各建图轨迹所对应的更新时间,更新时间可以是指生成时间戳,记录了相应建图轨迹的生成时间。
69.步骤s43:基于与各建图轨迹所对应的更新时间,将目标地图划分为低新鲜度区域、中新鲜度区域和高新鲜度区域。
70.其中,可使服务器将全部建图轨迹,以更新时间为划分依据,将更新时间为第一时间段内的建图轨迹,确定为第一类轨迹,将更新时间为第二时间段内的建图轨迹,确定为第二类轨迹,将更新时间为第三时间段内的建图轨迹,确定为第三类轨迹,第一时间段在第二时间段之前,第二时间段在第三时间段之前。
71.再使服务器将目标地图中与第一类轨迹对应的区域,确定为低新鲜度区域,将目标地图中与第二类轨迹对应的区域,确定为中新鲜度区域,将目标地图中与第三类轨迹对应的区域,确定为高新鲜度区域。
72.最后可使服务器将目标地图中的低新鲜度区域、中新鲜度区域和高新鲜度区域发送给客户端,以供用户在使用或更新地图时作参考,用于供用户确定地图的可信度。
73.基于上述方式,可有效改善用户使用地图时的体验。
74.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
75.本技术还提出一种地图管理方法,步骤s11-14与图1所示流程相同,此处不再赘述。如图6所示,图6是本技术地图管理方法的第三实施例的流程示意图,地图管理方法还包括:
76.步骤s51:确定目标地图中的待新增特征区域。
77.其中,可使服务器确定目标地图中需要新增加特征信息的待新增特征区域,特征信息可包括车道线信息、红绿灯信息、交通标识牌信息、公交站信息、停车场信息和其它类
型的特征信息中的一种或多种。
78.步骤s52:确定位姿数据库中与待新增特征区域对应的至少一个待新增特征轨迹。
79.其中,可使服务器确定待新增特征区域所涉及的全部待新增特征轨迹。
80.步骤s53:基于至少一个待新增特征轨迹,确定至少一个待新增特征数据。
81.其中,待新增特征数据为与待新增特征轨迹对应的原始建图数据。
82.可使服务器基于各待新增特征轨迹,获取与各待新增特征轨迹分别对应的原始建图数据。
83.步骤s54:基于至少一个待新增特征数据,生成地图特征数据。
84.其中,可使服务器基于获取的各原始建图数据,提取所需新增特征信息的数据,以生成相应的地图特征数据。
85.步骤s55:将地图特征数据添加到目标地图中,以进行地图特征的增加。
86.其中,可使服务器将生成的地图特征数据作为新的目标地图的图层,叠加到目标地图中,以使得目标地图可以在地图上显示相应的特征信息。
87.基于上述方式,可有效提高地图的信息完善度,且能够在不影响原有目标地图的基础上快速完成特征信息的完善,提高了地图管理方法的可靠性和管理效率。
88.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
89.本技术还提出一种地图管理方法,步骤s11-14与图1所示流程相同,此处不再赘述。如图7所示,图7是本技术地图管理方法的第四实施例的流程示意图,地图管理方法还包括:
90.步骤s61:获取目标地图中与目标待优化区域对应的第一轨迹和第二轨迹。
91.其中,第一轨迹的生成时间早于第二轨迹的生成时间。
92.步骤s62:基于与第一轨迹对应的原始建图数据和与第二轨迹对应的原始建图数据,对目标待优化区域进行优化。
93.可基于构建目标地图时使用的第一轨迹及相应原始建图数据,以及,新获得的第二轨迹及相应原始建图数据,对第一轨迹和第二轨迹同时涉及的目标待优化区域进行优化,以提高目标地图的精准度。
94.可选的,与第一轨迹对应的原始建图数据包括与目标待优化区域对应的第一坐标信息,与第二轨迹对应的原始建图数据包括与目标待优化区域对应的第二坐标信息。
95.步骤s62具体可包括:
96.基于第一坐标信息、第二坐标信息、与第一坐标信息对应的第一权重和与第二坐标信息对应的第二权重,计算第一坐标信息和第二坐标信息的权值之和,以得到与目标待优化区域对应的优化后的坐标信息。
97.具体的,可为基于第一轨迹及相应原始建图数据确定的第一坐标信息,配置一第
一权重,再为基于第二轨迹及相应原始建图数据确定的第二坐标信息,配置一第二权重,其中,第一权重可以小于第二权重,也可以等于第二权重,还可以大于第二权重,具体可根据实际需求而定,此处不作限定。
98.基于上述方式,可以不断根据新获得的涉及目标待优化区域的轨迹,对目标待优化区域的坐标信息做出优化,以不断提高目标地图的精确度。
99.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
100.本技术还提出一种地图管理装置,如图8所示,图8是本技术地图管理装置的一实施例的结构示意图,地图管理装置80包括:处理器81、存储器82以及总线88。
101.该处理器81、存储器82分别与总线88相连,该存储器82中存储有程序指令,处理器81用于执行程序指令以实现上述实施例中的地图管理方法。
102.在本实施例中,处理器81还可以称为cpu(central processing unit,中央处理单元)。处理器81可能是一种集成电路芯片,具有信号的处理能力。处理器81还可以是通用处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或者其它可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。通用处理器可以是微处理器或者该处理器81也可以是任何常规的处理器等。
103.具体地,地图管理装置80具体可以是一服务器或服务器中一模块,可与客户端实现通讯连接,以接收客户端所发送的更新操作指令或向客户端发送相关的数据。客户端可以是车载设备、手机、电脑或其它通讯设备,此处不作限定。
104.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
105.本技术还提出一种计算机可读存储介质,如图9所示,图9是本技术计算机可读存储介质的一实施例的结构示意图,计算机可读存储介质90其上存储有程序指令91,程序指令91被处理器(图未示)执行时实现上述实施例中的地图管理方法。
106.本实施例计算机可读存储介质90可以是但不局限于u盘、sd卡、pd光驱、移动硬盘、大容量软驱、闪存、多媒体记忆卡、服务器、fpga或asic中的存储单元等。
107.区别于现有技术,本技术的技术方案可先确定目标地图中的待更新区域,再从预设的位姿数据库中查找与待更新区域对应的至少一个待删除轨迹,然后再确定该至少一个待删除轨迹所对应的原始建图数据,最后删除目标地图中与原始建图数据对应的映射数据
即可完成更新。基于上述方式,可通过位姿数据库中与待更新区域对应的轨迹,查找到相应的构建目标地图时使用的原始建图数据,之后删除相应原始建图数据所对应的目标地图中的映射数据,即可准确、高效地完成目标地图中的数据的删除,以对目标地图进行更新,提高了地图管理方法的可靠性和管理效率。
108.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1