一种测量向量分量缺失情况下欧拉角优化方法与流程
1.本发明涉及通信电学类技术领域,尤其涉及一种测量向量分量缺失情况下欧拉角优化方法。
背景技术:
2.近年来,定向钻井技术在石油勘探开发中发挥着日益重要的作用。在定向钻井过程中为确保钻具按预设轨迹实施钻进,需要按一定井深间隔在实际井眼轨迹的多个测量点获取钻具的航姿参数。航姿参数包括变换矩阵、欧拉角等,它描述了钻具坐标系在某一参考坐标系中的角位置。获取钻具的航姿参数是指利用装载于钻柱测量单元的加速度计以及磁传感器测量重力加速度向量与地磁向量,并通过数据处理得到一组欧拉角。
3.在实际应用中,井下高温高压及强振动环境会导致传感器故障,此外,钻具本身的铁磁材料会对地磁场造成干扰,上述因素将导致重力加速度向量或地磁向量测量值的某些分量严重失真,不能用于数据处理,造成测量向量分量缺失问题,此时传统方法无法获取钻具欧拉角。针对这一问题,文献1(范光第,蒲文学,赵国山.磁力随钻测斜仪轴向磁干扰校正方法[j]. 石油钻探技术,2017,45(4):121
‑
126.)利用向量模值不变条件估计缺失分量,进而完成欧拉角估计,但该方法不能确定欧拉角唯一解,且只能用于缺失一个分量的情况。文献2(soo y b, sung h m, hyunwook w. sensor
‑
fault tolerant attitude determination using two
‑
stage estimator[j]. advances in space research, 2019, 63, 3632
‑
3645.)利用陀螺测量信息复原向量测量缺失信息,这种方法需要外加陀螺传感器,增加了应用成本,此外井下复杂的应用环境也会对陀螺传感器造成严重不利影响。文献3(基于非完整测量向量的航姿解算方法,发明专利zl202110525236.7)提供了一种在缺失一个或两个测量向量分量情况下的航姿求解方法,但该方法无法利用已知分量的可信度改善求解精度,也不能扩展至具有多组传感器的配置情况。
[0004]
本发明专利提供了一种欧拉角优化方法,该方法仅使用加速度计及磁传感器,能够在重力加速度向量或地磁向量测量分量缺失条件下获取欧拉角值,可用于测量向量缺失一个或两个分量的情况,并可依据已知分量的可信度调整优化函数,且便于扩展至具有多组传感器的配置情况,具有成本低、实用性强的优点。
[0005]
为此,我们提出一种测量向量分量缺失情况下欧拉角优化方法来解决上述问题。
技术实现要素:
[0006]
本发明的目的是为了解决现有技术中问题,而提出的一种测量向量分量缺失情况下欧拉角优化方法。
[0007]
为了实现上述目的,本发明采用了如下技术方案:一种测量向量分量缺失情况下欧拉角优化方法,包括以下步骤:s1、计算满足重力加速度向量变换关系的变换矩阵,设重力加速度向量a在参考坐标系中的坐标值为:a
r=
[a
rx
,a
ry
,a
rz
]
t
,在钻具坐标系
中坐标值即加速度计测量值为:a
b=
[a
bx
,a
by
,a
bz
]
t
;地磁向量m在参考坐标系中的坐标值为:m
r
=[m
rx
,m
ry
,m
rz
]
t
,在钻具坐标系中坐标值即磁传感器测量值为:m
b
=[m
bx
,m
by
,m
bz
]
t
,以上各向量分量的角标x,y,z分别表示向量的x轴分量、y轴分量及z轴分量,当m
bz
缺失,或m
by
与m
bz
均缺失时,设缺失分量值为任意常数,进行如下计算,计算参考坐标系中的一组单位正交基向量r
x
,r
y
,r
z
:计算钻具坐标系中对应的单位正交基向量b
x
,b
y
,b
z
:最后计算坐标变换矩阵c
s
:c
s
即为满足重力加速度向量变换关系的变换矩阵,s2、确定优化目标函数与优化参数,实际的变换矩阵应同时满足重力加速度向量与地磁向量的变换关系,但c
s
仅能满足重力加速度变换关系,为此,可在c
s
基础上做调整以求得实际变换矩阵的最优值,调整方法是以c
s
为起点,以重力加速度向量为轴做定轴旋转变换,该变换可以保持重力加速度向量变换关系,设定轴转动的角度为α,则旋转变换矩阵c
α
可由下式计算:式中i3为3x3的单位矩阵,u的表达式为:式中b
xx
,b
xy
,b
xz
分别为b
x
的x轴分量、y轴分量及z轴分量,对c
s
进行上述定轴旋转变换调整后可得变换矩阵c
t
,其表达式为:在由c
t
描述的变换关系下,磁传感器测量向量估计值可表示为:可表示为:的x轴分量、y轴分量及z轴分量分别为、及,当经旋转变换调整得到的变换矩阵为最优值时,磁传感器测量向量估计值应与实际测量值m
b
距离最小,据此可
构建优化目标函数,当m
bz
缺失时,优化目标函数为:式中w为权重系数,用于在两个分量间调节权重比,权重系数的设置依据是已知分量的可信度,测量精度高且受干扰小的传感器测量分量具有更高的可信度,其在目标函数中应具有更高的权重,当m
by
与m
bz
均缺失时,优化目标函数为:对应于钻具坐标系的某一固定角位置,c
s
与u为固定值,因此目标函数可视为转动角度α的一元函数,α即为优化参数,s3、按δα递增计算α不同取值情况下的优化目标函数值,α的取值范围为0至360度,在此范围内,根据实际应用的精度要求以0度为起点,并按一定间隔δα对α依次递增取值,直至360度,对α的每一个取值,由式(12)或式(13)计算对应的目标函数值,在应用中可根据计算量及精度要求调整δα,当δα增大时,精度降低,计算量减小;当δα减小时,精度提高,计算量增大,s4、确定变换矩阵c
t
的优化值,利用第三步的计算结果可以确定优化目标函数取极小值时对应的α值,用α
o
表示此值,由式(8)可计算与α
o
对应的旋转变换矩阵,进而可由式(10)计算对应的变换矩阵c
t
,该变换矩阵与优化目标函数的极小值对应,即为c
t
的优化结果,用c
to
表示此结果,在应用中,环境干扰与测量误差会严重影响向量测量结果,为避免干扰与测量误差造成的较大的计算误差,设置阈值t,当优化目标函数极小值小于t时可计算对应的c
to
,否则,可认为存在严重的干扰或测量误差,不能求解,还应指出,在测量向量缺失一个或两个分量情况下,优化目标函数的极小值数量至多为两个,s5、计算欧拉角优化值,将c
to
转变为一组欧拉角,即航向角ψ、俯仰角θ、横滚角γ,计算公式如下:式中c
toij
表示c
to
的第i行第j列元素,ψ,θ, γ即为欧拉角优化值。
[0008]
优选的,在应用中,环境干扰与测量误差会严重影响向量测量结果,为避免干扰与测量误差造成的较大的计算误差,设置阈值t,当优化目标函数极小值小于t时可计算对应的c
to
,否则,可认为存在严重的干扰或测量误差,不能求解,还应指出,在测量向量缺失一个或两个分量情况下,优化目标函数的极小值数量至多为两个。
[0009]
优选的,构建优化目标函数的方法可以推广至具有多组传感器配置的情况,即使用每一个已知分量的估计值与测量值差的平方和构建优化目标函数,并可依据分量可信度为每一个平方项设置不同的权重系数。
[0010]
优选的,优化方法仅使用向量传感器数据不需要陀螺仪等其它传感器,计算量及
计算精度可调,当δα增大时,精度降低,计算量减小;当δα减小时,精度提高,计算量增大。
[0011]
与现有技术相比,本发明的有益效果是:1、将变换矩阵调整参数归结为旋转角度,不仅使调整过程具有明确的几何意义,而且将调整参数的数量缩减至最小,为解决测量向量分量缺失情况下欧拉角估计问题提供了一种可行的新技术方案。
[0012]
2、利用未缺失分量与相应估计值的距离构建优化目标函数,使优化方法可用于缺失一个或两个分量的情况,并可扩展至具有多组传感器的配置情况,扩大了适用范围。引入可依据已知分量可信度调节的权重系数,可以使目标函数根据实际测量情况有所侧重,提升计算结果的准确性。
[0013]
3、优化方法仅使用向量传感器数据不需要陀螺仪等其它传感器,降低了方法应用成本,并提升了方法的实用性。计算量可根据应用精度要求调整,提升了方法实施的灵活性。
附图说明
[0014]
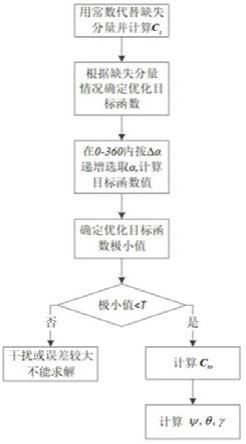
图1为完整向量航姿测量单元传感器示意图;图2为测量向量分量缺失情况下航姿测量单元传感器示意图;图3为测量向量分量缺失情况下欧拉角优化方法示意图;图4为实施例1优化目标函数值计算结果;图5为实施例2优化目标函数值计算结果。
具体实施方式
[0015]
下面将结合本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0016]
图1是完整向量航姿测量单元传感器示意图。航姿测量单元包含加速度计组与磁传感器组,分别用于测量重力加速度向量α与地磁向量m。每组传感器由三个具有不同敏感轴向的传感器构成,其中z轴与航姿测量单元轴向平行,x
‑
y平面与测量单元横截面平行,x
‑
y
‑
z坐标系构成测量单元物体坐标系。
[0017]
图2是测量向量分量缺失情况下航姿测量单元传感器示意图。需指出的是,在应用中造成测量向量分量缺失的原因除相应分量传感器缺失外,还包括传感器故障或干扰造成某些测量分量不可用,这些情况可等效视为相应分量传感器缺失。
[0018]
本发明利用优化方法对测量向量分量缺失情况下的加速度计与磁传感器测量值进行处理以获取欧拉角最优估计值。该方法可分为五个步骤实施,下文将以磁传感器测量向量缺失z轴分量,或缺失y轴与z轴分量两种情况为例,详细说明该方法的技术方案。应当指出,重力加速度向量与地磁向量在计算过程中具有对等的计算关系,同一向量的不同分量亦具有对等的计算关系,因此,下文针对具体情况的处理方法具有一般性,可推广至其它分量缺失情况。
[0019]
图3是一种测量向量分量缺失情况下欧拉角优化方法,包括以下步骤:s1、计算满足重力加速度向量变换关系的变换矩阵,设重力加速度向量α在参考坐标系中的坐标值为:α
r
=[α
rx
, α
ry
, α
rz
]
t
,在钻具坐标
系中坐标值即加速度计测量值为:α
b
=[α
bx
, α
by
, α
bz
]
t
;地磁向量m在参考坐标系中的坐标值为:m
r
=[m
rx
, m
ry
, m
rz
]
t
,在钻具坐标系中坐标值即磁传感器测量值为:m
b
=[m
bx
, m
by
, m
bz
]
t
,以上各向量分量的角标x,y,z分别表示向量的x轴分量、y轴分量及z轴分量,当m
bz
缺失,或m
by
与m
bz
均缺失时,设缺失分量值为任意常数,进行如下计算,计算参考坐标系中的一组单位正交基向量r
x
,r
y
,r
z
:计算钻具坐标系中对应的单位正交基向量b
x
,b
y
,b
z
:最后计算坐标变换矩阵c
s
:c
s
即为满足重力加速度向量变换关系的变换矩阵,s2、确定优化目标函数与优化参数,实际的变换矩阵应同时满足重力加速度向量与地磁向量的变换关系,但c
s
仅能满足重力加速度变换关系,为此,可在c
s
基础上做调整以求得实际变换矩阵的最优值,调整方法是以c
s
为起点,以重力加速度向量为轴做定轴旋转变换,该变换可以保持重力加速度向量变换关系,设定轴转动的角度为α,则旋转变换矩阵c
α
可由下式计算:式中i3为3x3的单位矩阵,u的表达式为:式中b
xx
,b
xy
,b
xz
分别为b
x
的x轴分量、y轴分量及z轴分量,对c
s
进行上述定轴旋转变换调整后可得变换矩阵c
t
,其表达式为:在由c
t
描述的变换关系下,磁传感器测量向量估计值可表示为:可表示为:的x轴分量、y轴分量及z轴分量分别为、及,,当经旋转变换调整得到的变换矩阵为最优值时,磁传感器测量向量估计值应与实际测量值m
b
距离最小,据此可
构建优化目标函数,当m
bz
缺失时,优化目标函数为:式中w为权重系数,用于在两个分量间调节权重比,权重系数的设置依据是已知分量的可信度,测量精度高且受干扰小的传感器测量分量具有更高的可信度,其在目标函数中应具有更高的权重,当m
by
与m
bz
均缺失时,优化目标函数为:以上构建优化目标函数的方法可以推广至具有多组传感器配置的情况,即使用每一个已知分量的估计值与测量值差的平方和构建优化目标函数,并可依据分量可信度为每一个平方项设置不同的权重系数,对应于钻具坐标系的某一固定角位置,c
s
与u为固定值,因此目标函数可视为转动角度α的一元函数,α即为优化参数,s3、按δα递增计算α不同取值情况下的优化目标函数值,α的取值范围为0至360度,在此范围内,根据实际应用的精度要求以0度为起点,并按一定间隔δα对α依次递增取值,直至360度,对α的每一个取值,由式(12)或式(13)计算对应的目标函数值,在应用中可根据计算量及精度要求调整δα,当δα增大时,精度降低,计算量减小;当δα减小时,精度提高,计算量增大,s4、确定变换矩阵c
t
的优化值,利用第三步的计算结果可以确定优化目标函数取极小值时对应的α值,用α
o
表示此值,由式(8)可计算与α
o
对应的旋转变换矩阵,进而可由式(10)计算对应的变换矩阵c
t
,该变换矩阵与优化目标函数的极小值对应,即为c
t
的优化结果,用c
to
表示此结果,在应用中,环境干扰与测量误差会严重影响向量测量结果,为避免干扰与测量误差造成的较大的计算误差,设置阈值t,当优化目标函数极小值小于t时可计算对应的c
to
,否则,可认为存在严重的干扰或测量误差,不能求解,还应指出,在测量向量缺失一个或两个分量情况下,优化目标函数的极小值数量至多为两个,s5、计算欧拉角优化值,将c
to
转变为一组欧拉角,即航向角ψ、俯仰角θ、横滚角γ,计算公式如下:s5、计算欧拉角优化值,式中c
toij
表示c
to
的第i行第j列元素,ψ,θ, γ即为欧拉角优化值。
[0020]
为验证上述方法的效果,给出两个计算实例,分别对应m
bx
缺失以及m
by
与m
bz
均缺失的情况。实例的基本计算过程是:首先应用完整向量测量数据进行计算,得到欧拉角参考值,然后去除磁传感器测量数据中的相关分量,采用本发明方法得到欧拉角的优化结果,最后对欧拉角参考值与优化结果进行对比。实例中参考坐标系为东北天坐标系,钻具坐标系
为传感器坐标系,设置阈值t=10000,具体计算过程如下,实施例1在参考坐标系下α
r
=[0,0,9.8]
t
,m
r
=[
‑
3627,29344,44065]
t
,加速度计完整测量向量α
b
=[
‑
4.488.09
‑
3.24]
t
,磁传感器完整测量向量m
b
=[43656
‑
30143
‑
1214]
t
,以上各量中,加速度向量单位为米/秒2,磁向量单位为纳特,利用完整测量向量由式(1)至式(7)可得变换矩阵c
s
,由于无分量缺失,此时有c
t0
=c
s
并由式(14)至式(16)可得航向角参考值为:
‑
59.27度,俯仰角参考值为:55.69度,横滚角参考值为:125.85度,去除m
bz
,使地磁测量向量缺失一个分量,欧拉角优化计算过程如下:(1)设m
bz
=1000,由式(1)至式(7)可得:(2)令权重系数w为1,确定优化目标函数为:,显然,该函数的取值由优化参数α的取值决定,(3)取δα为1,即α取值分别为:0,1,2
…
359,由式(8)至式(12)可计算优化目标函数的对应取值,计算结果如图4所示,(4)由前一步计算结果可知优化目标函数的极小值为5615.7,其对应的α
o
=355,(5)t=10000,显然,目标函数极小值小于阈值,由式(8)至式(10)可得:(6)由(14)至式(16)可得ψ=
‑
60.64,θ=55.69,γ=125.85,对比参考值与优化结果可知,航向角误差为
‑
1.37度,俯仰角误差为0度,横滚角误差为0,实施例2在参考坐标系下α
r
=[0,0,9.8]
t
,m
r
=[
‑
3627,29344,44065]
t
,加速度计完整测量向量α
b
=[
‑
4.596.076.18]
t
,磁传感器完整测量向量m
b
=[37794
‑
590336900]
t
,以上各量中,加速度向量单位为米/秒2,磁向量单位为纳特,利用完整测量向量由式(1)至式(7)可得变换矩阵c
s
,由于无分量缺失,此时有c
to
=c
s
并由式(14)至式(16)可得航向角参考值为:23.49度,俯仰角参考值为:38.27度,横滚角参考值为:36.59度,去除m
by
与m
bz
,使地磁测量向量缺失两个分量,欧拉角优化计算过程如下:(1)设m
by
=m
bz
=1000,由式(1)至式(7)可得:(2)确定优化目标函数为:,显然,该函数的取值由优化参数α的取值决定,(3)取δα为1,即α取值分别为:0,1,2
…
359,由式(8)至式(12)可计算优化目标函
数的对应取值,计算结果如图5所示,(4)由前一步计算结果可知优化目标函数存在两个极小值,分别为117.4,5303.0,其对应的优化参数为α
o1
=49,α
o2
=311,(5)t=10000,显然,目标函数极小值均小于阈值,由式(8)至式(10)可得:(6)由(14)至式(16)分别对上述两组转换矩阵处理,可得第一组欧拉角优化结果为ψ=23.48,θ=38.27,γ=36.59;第二组优化结果为ψ=121.48, θ=38.27,γ=36.59,对比参考值与第一组优化结果可知,航向角误差为0.01度,俯仰角误差为0度,横滚角误差为0度。
[0021]
在本发明为解决测量向量分量缺失情况下欧拉角估计问题提供了一种可行的新技术方案,利用未缺失分量与相应估计值的距离构建优化目标函数,使优化方法可用于缺失一个或两个分量的情况,并可扩展至具有多组传感器的配置情况,扩大了适用范围,同时本优化方法仅使用向量传感器数据不需要陀螺仪等其它传感器,降低了方法应用成本,并提升了方法的实用性。
[0022]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1