一种获取危岩体地形剖面的方法与流程
1.本发明涉及地表形态获取技术领域,特别是一种获取危岩体地形剖面的方法。
背景技术:
2.中国山区面积占全国总面积的69.1%,由于地形地貌陡峭,常常在高陡边坡形成危岩体,危岩崩落后严重威胁铁路、公路、房屋等建筑物和相关人员的安全,目前传统的获取高陡边坡危岩体地形剖面的方法有4种:
①
通过使用全站仪等测量设备现场测量危岩体剖面;
②
通过剖切大比例尺地形图获得危岩体剖面;
③
通过剖切无人机光学影像的三维点云数据获得危岩体的剖面;
④
通过剖切激光雷达的三维点云数据获得危岩体的剖面。
3.第一种方法:由于危岩体高陡,测量人员难以到达,不仅效率低下、危险性大、测量精度也较低,不能在一条测量线上准确获取危岩体的微地貌特征,特别是对于倒悬状的危岩体无法开展实测工作;第二种方法:能够快速获得地形的剖面形态,但由于等高线在制作时对测量点坐标进行了拟合处理,精确度极低,剖切断面只能显示宏观的地貌特征,不能准确获取危岩体倒悬、陡倾近直立的微地貌特征;第三种方法:由于无人机光学影像往往有植被遮挡,技术难度大、操作不简便、剖切效率低、剖切精度也受地貌植被的影响;第四种方法:由于无人机搭载荷载有限,其搭载的激光雷达设备功率往往较小,雷达的激光照射到危岩体并返回的测量点有限,且获取的原始数据仍会含有植被的形态数据,虽然能有少量激光点能穿越植被获得地表形态,但获取成本高、技术难度大、操作不简便,需后期进行去植被处理,剖切效率较低。
技术实现要素:
4.本发明的发明目的在于:现有技术获取危岩体地形剖面的方法,人工测量效率低,大比例尺地形图获取的特征精度低,无人机光学影像及激光雷达的应用成本高,还需要专业软件进行复杂的剖切运算,针对以上问题,提供一种获取危岩体地形剖面的方法,利用无人机三维倾斜摄影模型的测量数据,能够快速准确地获得危岩体地形特征,无需专业软件进行复杂的剖切运算,尤其利于获取陡倾直立岩体、倒悬状岩体的地形地貌特征。
5.为了实现上述目的,本发明采用的技术方案为:
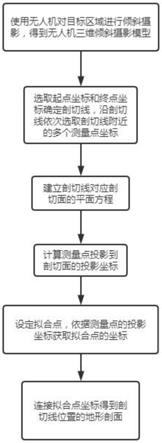
6.一种获取危岩体地形剖面的方法,包括如下步骤:
7.a、使用无人机在目标区域的上空进行三维倾斜摄影,将航拍的图片进行三维建模,得到无人机三维倾斜摄影模型;
8.b、在无人机三维倾斜摄影模型上选取起点坐标和终点坐标,确定需要获取目标区域内危岩体地形的剖切线,并沿剖切线依次选取剖切线附近的多个测量点坐标;
9.c、建立剖切线对应剖切面的平面方程;
10.d、计算得到测量点投影到剖切面的投影坐标;
11.e、设定地形剖面的拟合点,依据测量点的投影坐标判断对应地形的倒悬特征,根据判断结果获取拟合点的坐标;
12.f、将获得的拟合点坐标依次连接成线得到剖切线位置的地形剖面。
13.选取的起点和终点确定一条直线,该直线作为需要获取危岩体地形剖面的剖切线,沿剖切线生成垂直于三维坐标xoy平面的剖切平面,在模型上沿着剖切线的方向根据地形走势依次选取剖切线附近的测量点,测量点的前后位置顺序是依据模型上的地形走向进行排序,例如剖切线经过模型上的一个水平凹坑,则沿剖切线选取测量点时,会从凹坑的开口沿凹坑的下侧壁朝凹坑的底部进行选取,再从凹坑的底部沿凹坑的上侧壁朝凹坑开口进行选取,保证依次选取的测量点能够体现出凹坑的地形特征,进一步的,由于现有使用无人机三维倾斜摄影模型,都是人工在屏幕上进行测量点的选取,无法精准的在剖切线上选取测量点,故人工紧靠剖切线选取得到剖切线附近的多个测量点坐标后,再将测量点投影到剖切面上获得投影坐标,将相邻测量点的投影坐标通过计算判断相邻测量点之间的地形特征是否具有倒悬特征,根据判断结果选择相应的计算方式来获取拟合点的坐标,即将多个测量点的投影坐标处理为二维坐标,按测量点选取的顺序依次将拟合点坐标连接生成曲线,得到的曲线图则能够近似展现剖切线对应区域的地形剖面,从而能够直观的获取选取区域的地形地貌特征;
14.本发明的一种获取危岩体地形剖面的方法,利用无人机三维倾斜摄影模型的测量数据,经过计算判断的处理得到剖切面的地形曲线,能够快速准确地获得危岩体地形特征,无需专业软件进行复杂的剖切运算,获取操作简单,技术要求低,在危岩落石防治中实用性强,尤其利于获取陡倾直立岩体、倒悬状岩体的地形地貌特征,从而能准确判断危岩的类型,提高危岩体稳定性、危岩体方量以及落石运动轨迹的计算准确性,减少危岩落石防治的设计变更,节约建设经费,具有很高的应用价值。
15.优选地,所述步骤d中,判断地形的倒悬特征并获取拟合点坐标包括如下步骤:
16.d1:所述步骤a选取的起点坐标为p0(x0,y0,z0),终点坐标为pn(xn,yn,zn)(n=1,2,3
…
),测量点坐标为pi(xi,yi,zi)(0<i<n,且i=1,2,3
…
);所述步骤c获得的测量点的投影坐标为p
i’(x
i’,y
i’,z
i’)(0<i<n,且i=1,2,3
…
);
17.将相邻两个测量点的投影坐标通过判断式一进行判断,判断式一为:
18.(x
n-x0)(x
i+1
’‑
x
i’)≤0且(y
n-y0)(y
i+1
’‑yi’)≤0,(0<i<n-1,且i=1,2,3
…
);
19.满足判断式一的要求,则相邻两个测量点之间的地形具有倒悬特征;
20.将起点坐标与第一个测量点的投影坐标通过判断式二进行判断,判断式二为:
21.(x
n-x0)(x1’‑
x0)≤0且(y
n-y0)(y1’‑
y0)≤0;
22.满足判断式二的要求,则起点与第一个测量点之间的地形具有倒悬特征;
23.将最后一个测量点的投影坐标与终点坐标通过判断式三进行判断,判断式三为:
24.(x
n-x0)(x
n-x
n-1’)≤0且(y
n-y0)(y
n-y
n-1’)≤0;
25.满足判断式三的要求,则最后一个测量点与终点之间的地形具有倒悬特征;
26.d2:设地形剖面的拟合点为
△
pi,坐标设为(li,hi)(0≤i≤n,且i=1,2,3
…
),h0=z0,设l0=0,根据所述步骤c获得的投影坐标,计算相邻两个测量点的投影坐标在剖切面的水平增量:
27.(0<i<n-1,且i=1,2,3
…
);相邻两个测量点的投影坐标满足判断式一的要求,则:l
i+1
=li‑△
l
i+1
,(0<i<n-1,且i=1,2,3
…
);
28.h
i+1
=z
i+1’,(0<i<n-1,且i=1,2,3
…
);
29.相邻两个测量点的投影坐标不满足判断式一的要求,则:l
i+1
=li+
△
l
i+1’,(0<i<n-1,且i=1,2,3
…
);
30.h
i+1
=z
i+1’,(0<i<n-1,且i=1,2,3
…
);
31.起点坐标与第一个测量点的投影坐标的水平增量:
[0032][0033]
起点坐标与第一个测量点的投影坐标满足判断式二的要求,则:l1=l0‑△
l1;
[0034]
h1=z1’
;
[0035]
起点坐标与第一个测量点的投影坐标不满足判断式二的要求,则:l1=l0+
△
l1;
[0036]
h1=z1’
;
[0037]
最后一个测量点的投影坐标与终点坐标的水平增量:
[0038][0039]
最后一个测量点的投影坐标与终点坐标满足判断式三的要求,则:ln=l
n-1
‑△
ln;
[0040]hn
=zn;
[0041]
最后一个测量点的投影坐标与终点坐标不满足判断式三的要求,则:
[0042]
ln=l
n-1
+
△
ln;
[0043]hn
=zn。
[0044]
所述终点坐标为pn,则对应有n-1个选取的测量点,n则是多个测量点沿剖切线依据地形走向的排列顺序,由于地形剖面是垂直于三维模型的xoy平面,因此地形剖面曲线对应的拟合点,拟合点的纵坐标对应投影坐标的z轴坐标,拟合点的横坐标则是投影坐标的xy轴坐标的拟合值,拟合点的x轴初始坐标为剖切线的起点,可以任意设定初始值,不影响整个剖面的展现。
[0045]
优选地,所述步骤d1中,判断式的获取过程如下:
[0046]
判断式一是判断相邻两个测量点的投影坐标,起点坐标和终点坐标连成的剖切线共存在四种情况,直线的表达式为y=kx+b:
[0047]
一:k》0,则x
n-x0》0,y
n-y0》0;
[0048]
当相邻两个测量点的连线为倒悬特征时:x
i+1-xi《0且y
i+1-yi《0(0<i<n-1,且i=1,2,3
…
);
[0049]
得到(x
n-x0)(x
i+1
’‑
x
i’)《0且(y
n-y0)(y
i+1
’‑yi’)《0;
[0050]
二:k《0,则x
n-x0》0,y
n-y0《0;
[0051]
当相邻两个测量点的连线为倒悬特征时:x
i+1-xi《0且y
i+1-yi》0(0<i<n-1,且i=1,2,3
…
);
[0052]
得到(x
n-x0)(x
i+1
’‑
x
i’)《0且(y
n-y0)(y
i+1
’‑yi’)《0;
[0053]
三:x=常数,则x
n-x0=0,y
n-y0》0;
[0054]
当相邻两个测量点的连线为倒悬特征时:x
i+1-xi=0且y
i+1-yi《0(0<i<n-1,且i=1,2,3
…
);
[0055]
得到(x
n-x0)(x
i+1
’‑
x
i’)=0且(y
n-y0)(y
i+1
’‑yi’)《0;
[0056]
四:k=0,则x
n-x0》0,y
n-y0=0;
[0057]
当相邻两个测量点的连线为倒悬特征时:x
i+1-xi《0且y
i+1-yi=0(0<i<n-1,且i=1,2,3
…
);
[0058]
得到(x
n-x0)(x
i+1
’‑
x
i’)《0且(y
n-y0)(y
i+1
’‑yi’)=0;
[0059]
综上得到地形出现倒悬地形特征的判断式一为:(x
n-x0)(x
i+1
’‑
x
i’)≤0且(y
n-y0)(y
i+1
’‑yi’)≤0,(0<i<n-1,且i=1,2,3
…
);同理,推算得到判断式二和判断式三。
[0060]
所述判断式一的获取步骤中,是基于起点坐标的x轴坐标小于或等于终点坐标的x轴坐标进行计算的,即x0≤xn,若在选取坐标时,终点坐标的x轴坐标小于或等于起点坐标的x轴坐标,即x0≥xn时,判断式一获取的原理相同,且最终获取的判断式一不会改变,同理,判断式二和判断式三的获取结果也不会改变。
[0061]
优选地,所述步骤b包括如下步骤:
[0062]
b1:剖切线对应的剖切面是垂直于无人机三维倾斜摄影模型的xoy平面,则剖切面的法向量为(a,b,0);
[0063]
b2:将所述步骤a选取的起点坐标p0(x0,y0,z0)和终点坐标pn(xn,yn,zn)(n=1,2,3
…
)代入点法式平面方程得到:a(x
n-x0)+b(y
n-y0)=0,推出:axn+byn+(-ax
0-by0)=0,代入一般式平面方程得到:d=-ax
0-by0,式中,a、b为点法式平面方程和一般式平面方程的系数,d为一般式平面方程的系数;
[0064]
b3:系数a和系数b择一设定一个非零的假设值,求得另一个系数和系数d的值,建立剖切面的平面方程。
[0065]
择一将一个系数设定为假设值是数学求解方程的方法,假设值不影响最后得到的剖面曲线。
[0066]
优选地,所述步骤c中,计算包括如下步骤:
[0067]
c1:获得的测量点pi坐标为(xi,yi,zi)(0<i<n,且i=1,2,3
…
),pi点投影到剖切平面上的点为p
i’,坐标设为(x
i’,y
i’,z
i’)(0<i<n,且i=1,2,3
…
);
[0068]
c2:pi与p
i’的连线与剖切面的法向量平行,两线的斜率相等,得到:设定一个中间值ti(0<i<n,且i=1,2,3
…
),换算得到:x
i-x
i’=ati,y
i-y
i’=bti,且zi=z
i’,进一步推出x
i’=xi–
ati,y
i’=yi–
bti,结合坐标p
i’在剖切面内,则axi+byi+d=0,得到
[0069]
将ti代入x
i’=xi–
at,y
i’=yi–
bt,求得测量点pi在剖切平面上的投影坐标p
i’(x
i’,y
i’,z
i’)。
[0070]
优选地,所述步骤a中,在地形地貌变化或转折处,缩小相邻两个测量点的选取间距。
[0071]
相邻两个测量点的间距是指在模型的三维坐标系中实际的空间间距,在模型上肉眼难以判断清楚或明显发生地形变化的区域缩小相邻两个测量点的选取间距,增加进行计算处理的测量数据,能够增加对该区域地形剖面展示的精确度。
[0072]
优选地,增大测量点的选取密度时,沿剖切线方向,依据模型上的地形走向选取相
邻两个测量点的间距不超过0.1m。
[0073]
在危岩落石防治的设计中,危岩体块径小于0.1m的岩块体积约为7.85dm3(约拳头大小),砸中承灾体概率极小,滚落至坡脚时能量低,易防治,对承灾体威胁较小,进而直径小于0.1m的危岩体并不对危岩体工程防治措施起决定性作用,且结合三维倾斜摄影模型的测量精度反而增加了危岩体微地貌获取的难度,因此在疑似危岩区处控制选取相邻两个测量点的间距,能够有效减少或避免遗漏对危岩体块径大于0.1m的危岩的计算。
[0074]
优选地,完成所述步骤b之后,在进行所述步骤c之前,将选取的测量点进行校核,筛除偏离剖切面限定距离的测量点。
[0075]
人工选取的测量点不可避免的存在误差,若选取的测量点距剖切面的距离过大,会导致得到的地形剖面失真,限定距离则是控制地形剖面的精确度参数,增加对测量点的校核步骤,能够有效控制地形剖面的失真程度,保证获取地形剖面的利用价值。
[0076]
优选地,所述限定距离设定为0.2m。
[0077]
由于无人机三维倾斜摄影模型的测量精度通常为3cm~5cm,并在不影响剖切断面失真或误差过大的基础上,保证获取的危岩体地形剖面展示的精确度,减少或避免遗漏危岩体块径大于0.2m的危岩的地形特征。
[0078]
优选地,测量点进行校核是计算测量点到剖切面的垂直距离,计算的垂直距离大于限定距离,筛除对应的测量点并重新选取测量点进行替换,计算垂直距离的公式如下:
[0079]
(0<i<n,且i=1,2,3
…
)
[0080]
式中:di为垂直距离,xi、yi分别是测量点x轴和y轴的三维坐标,a、b、d为剖切面的一般方程式的系数。
[0081]
重新选取测量点进行替换时,需要注意筛除的测量点在模型上的地形位置,保证替换的测量点符合筛除的测量点的位置顺序,即重新选取的测量点的地形位置,须在筛除测量点前后相邻的两个测量点的地形位置之间。
[0082]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0083]
1、本发明的一种获取危岩体地形剖面的方法,利用无人机三维倾斜摄影模型的测量数据,经过处理计算得到剖切面的地形曲线,能够快速准确地获得危岩体地形特征,无需专业软件进行复杂的剖切运算,获取操作简单,技术要求低,在危岩落石防治中实用性强,尤其利于获取陡倾直立岩体、倒悬状岩体的地形地貌特征,从而能准确判断危岩的类型,提高危岩体稳定性、危岩体方量以及落石运动轨迹的计算准确性,减少危岩落石防治的设计变更,节约建设经费,具有很高的应用价值;
[0084]
2、通过在模型上肉眼难以判断清楚或明显发生地形变化的区域缩小相邻两个测量点的选取间距,增加进行计算处理的测量数据,能够增加对该区域地形剖面展示的精确度;
[0085]
3、通过增加对选取测量点的校核步骤,能够有效控制地形剖面的失真程度,保证获取地形剖面的利用价值。
附图说明
[0086]
图1是本发明所述的一种获取危岩体地形剖面的方法的流程图;
[0087]
图2是实施例1所述某高速铁路隧道进口的三维模型;
[0088]
图3是实施例1所述起点坐标的选取示意图;
[0089]
图4是实施例1所述剖切线的示意图;
[0090]
图5是实施例1所述的一种获取危岩体地形剖面的方法获得的地形剖面图;
[0091]
图6是实施例1通过剖切大比例尺地形图获得的地形剖面图;
[0092]
图7是实施例1通过剖切无人机光学影像的三维点云数据获得的地形剖面图;
[0093]
图8是实施例2所述的一种获取危岩体地形剖面的方法获得的地形剖面图;
[0094]
图9是实施例2通过剖切大比例尺地形图获得的地形剖面图。
具体实施方式
[0095]
下面结合附图,对本发明作详细的说明。
[0096]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明,应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0097]
实施例1
[0098]
如图1所示,本发明的一种获取危岩体地形剖面的方法,包括如下步骤:
[0099]
a、使用无人机在目标区域的上空进行三维倾斜摄影,将航拍的图片进行三维建模,得到无人机三维倾斜摄影模型;
[0100]
b、在无人机三维倾斜摄影模型上选取起点坐标和终点坐标,确定需要获取目标区域内危岩体地形的剖切线,并沿剖切线依次选取剖切线附近的多个测量点坐标;
[0101]
c、建立剖切线对应剖切面的平面方程;
[0102]
d、计算得到测量点投影到剖切面的投影坐标;
[0103]
e、设定地形剖面的拟合点,依据测量点的投影坐标判断对应地形的倒悬特征,根据判断结果获取拟合点的坐标;
[0104]
f、将获得的拟合点坐标依次连接成线得到剖切线位置的地形剖面。
[0105]
在本实施例中,是以某高速铁路隧道进口的危岩体为例,通过该方法获取危岩体的典型剖面和微地貌;
[0106]
进行步骤a:使用无人机在隧道进口的上空进行三维倾斜摄影,获取足量的航拍图片,将航拍的图片进行三维建模,获得无人机三维倾斜摄影模型,如图2所示,即获得对应隧道进口区域的三维模型;
[0107]
进行步骤b:如图3-图4所示,确定想要剖切危岩体的典型剖面,并通过人工在无人机三维倾斜摄影模型上点选两个点作为剖切线的起点坐标p0(513528.31,4028116.81,350.38)和终点坐标pn(513586.65,4028138.93,346.12);
[0108]
然后人工在无人机三维倾斜摄影模型上选取测量点pi,人工选取时,从起点坐标处,朝向终点坐标依次间隔一定距离进行选取,在无人机三维倾斜摄影模型上肉眼能够识别的地形地貌变化不大或较为明朗清楚的区域,选取测量点的间隔距离可以大点,而在地形地貌变化或转折处以及肉眼难以识别的区域,则需要缩小相邻两个测量点的选取间距,选取间距即是相邻两个测量点实际的空间距离,并尽量控制其选取间距在0.1m以内;
[0109]
在选取测量点时,需要依据模型上具体的地形确定测量点的排序,即从选取的起
点坐标朝向终点坐标选取测量点时,顺着实际地形的走势依次选取,尤其注意地形的凹陷处和倒悬处,保证测量点的排序能够对应地形的走势,
[0110]
选取测量点时需紧靠剖切线或在剖切线上进行选取,但肉眼判断以及模型本身肯定存在误差,故在模型上点选获取的测量点均认定为在剖切线的附近;
[0111]
最后,共选取了26个测量点pi,即0<i<27,且i=1,2,3
…
),分别有p1(513531.68,4028117.91,349.88)、p2(513538.80,4028120.85,349.78)
……
p
19
(513559.65,4028128.47,365.98)、p
20
(513559.17,4028127.93,359.4)
……
p
26
(513579.40,4028135.91,347.18)、则终点坐标为p
27
,即n=27。
[0112]
进行步骤b:将起点坐标p0和终点坐标p
27
的坐标值代入点法式平面方程:a(x
n-x0)+b(y
n-y0)=0,可以得到:
[0113][0114]
假设b=1,则a=-0.379156668,从而d=-ax
0-by0=-3833409.127;
[0115]
得到剖切面的一般式平面方程为:-0.379156668xn+y
n-3833409.127=0,平面的法相向量为(-0.379156668,1,0)。
[0116]
完成步骤c之后,可以对选取的测量点进行校核,计算测量点到剖切面的垂直距离,若计算的垂直距离大于0.2m,则筛除对应的测量点并重新选取测量点进行替换,若计算的垂直距离小于或等于0.2m,则该测量点满足要求,继续进行后续的计算,例如:
[0117]
将p1(513531.68,4028117.91,349.88)代入公式:
[0118]
(0<i<n,且i=1,2,3
…
)
[0119]
得到测量点p1到剖切面的垂直距离d1=0.166211729《0.2,则测量点p1的选取符合要求,以此类推校核得到测量点p2~p
26
均符合要求,继续进行下个步骤。
[0120]
进行步骤d:设测量点pi投影到剖切平面上的点为p
i’,坐标设为(x
i’,y
i’,z
i’)(0<i<27,且i=1,2,3
…
);pi与p
i’的连线与剖切面的法向量平行,两线的斜率相等,得到:设定一个中间值ti(0<i<27,且i=1,2,3
…
),换算得到:x
i-x
i’=ati,y
i-y
i’=bti,且zi=z
i’,进一步推出x
i’=xi–
ati,y
i’=yi–
bti,结合坐标p
i’在剖切面内,则axi+byi+d=0,得到
[0121]
则x1’
=x1–
at1=513531.62,y1’
=y1–
bt1=4028118.07,得到p1’
的坐标为(513531.62,4028118.07,349.88);
[0122]
以此类推获得p2’
(513538.82,4028120.80,349.78)
……
p
19’(513559.58,4028128.66,365.98)、p
20’(513558.98,4028128.44,359.4)
……
p
26’(513579.31,4028136.15,347.18)。
[0123]
进行步骤e:设地形剖面的拟合点为
△
pi,坐标设为(li,hi)(0≤i≤27,且i=1,2,3
…
),h0=350.38,设l0=0,根据步骤c求的投影坐标,计算相邻两个测量点的投影坐标在剖切面的水平增量:
[0124]
起点坐标与第一个测量点的投影坐标的水平增量:
[0125][0126]
将起点坐标与第一个测量点的投影坐标p1’
通过判断式二进行判断,判断式二为:
[0127]
(x
27-x0)(x1’‑
x0)≤0且(y
27-y0)(y1’‑
y0)≤0;
[0128]
不满足判断式二的要求,得到拟合点
△
p1的坐标为:
[0129]
l1=l0+
△
l1=3.54;
[0130]
h1=z1’
=349.88;
[0131]
第一个测量点的投影坐标p1’
与相邻第二个测量点的投影坐标p2’
的水平增量:
[0132][0133]
将第一个测量点的投影坐标p1’
与相邻第二个测量点的投影坐标p2’
通过判断式一进行判断,判断式一为:
[0134]
(x
27-x0)(x2’‑
x1’
)≤0且(y
27-y0)(y2’‑
y1’
)≤0;
[0135]
不满足判断式一的要求,得到拟合点
△
p2的坐标为:
[0136]
l2=l1+
△
l2=11.24;
[0137]
h2=z2’
=349.78;
[0138]
以此类推,计算
△
p3~
△
p
26
的坐标,其中,第十九个测量点的投影坐标p
19’与相邻第二十个测量点的投影坐标p
20’的水平增量:
[0139][0140]
将第一个测量点的投影坐标p
19’与相邻第二个测量点的投影坐标p
20’通过判断式一进行判断,判断式一为:
[0141]
(x
27-x0)(x
20
’‑
x
19’)≤0且(y
27-y0)(y
20
’‑y19’)≤0;
[0142]
满足判断式一的要求,得到拟合点
△
p
20
的坐标为:
[0143]
l
20
=l
19
‑△
l
20
=32.80;
[0144]h20
=z
20’=359.40;
[0145]
最后一个测量点的投影坐标p
26’与终点坐标p
27
的水平增量:
[0146][0147]
将最后一个测量点的投影坐标p
26’与终点坐标p
27
通过判断式三进行判断,判断式三为:
[0148]
(x
27-x0)(x
27-x
26’)≤0且(y
27-y0)(y
27-y
26’)≤0;
[0149]
不满足判断式三的要求,得到拟合点
△
p
27
的坐标为:
[0150]
l
27
=l
26
+
△
l
27
=62.39;
[0151]h27
=z
27
=346.12;
[0152]
得到拟合点的坐标:
△
p0(0,350.38)、
△
p1(3.54,349.88)、
△
p2(11.24,349.78)
……△
p
19
(33.44,365.98)、
△
p
20
(32.80,359.40)
……△
p
26
(54.54,347.18)、
△
p
27
(62.39,346.12);
[0153]
进行步骤f:将得到的拟合点
△
p0~
△
p
27
的坐标在xoy平面内通过直线连接,如图5所示,得到剖切线位置的地形剖面。
[0154]
从图5可以得到,该处危岩体有轻微倒悬的地形特征,根据判断结果,利于后续的稳定性计算,若按照以前通过剖切大比例尺地形图获得危岩体剖面,得到如图6所示的地形剖面,不仅无法准确获知危岩体的地形地貌,而且倒悬和陡倾近直立的地形特征也无法体现,导致后续的计算误差较大;
[0155]
通过剖切无人机光学影像的三维点云数据获得危岩体的剖面时,需要对数据进行人工预处理去除植被,工作量大,还需要使用国外专用的polywork专用软件,要求高,剖切出来的cad剖面是空间三维图,还需要再次进行投影形成二维平面,操作麻烦,当无人机光学影像的三维点云数据的采集密度不足时,如图7所示,获得的地形剖面还会是断续线,得到的剖面严重失真而难以应用;通过激光雷达进行数据获取的成本高,技术难度大。
[0156]
在本实施例中,由起点坐标和终点坐标之间的剖切线段,也可以对剖切线段的延长线区域获取地形剖面,起点坐标的延长线区域和终点坐标的延长线区域均可,仅在选取延长线附近的测量点时,注意测量点的排列顺序即可。
[0157]
在无人机三维倾斜摄影模型上人工选取测量点时还可以尽量避开植被覆盖的区域,减少植被形态数据的干扰,减少获取的地形地貌剖面展示的误差,而且对于植被发育地段,通常只是危岩体运动途径的区域,危岩体的发育地通常是裸露的地形,则本发明的方法用于运算落石的运动轨迹时,植被对运算的影响可以忽略不计。
[0158]
实施例2
[0159]
本发明的一种获取危岩体地形剖面的方法,包括如下步骤:
[0160]
a、使用无人机在目标区域的上空进行三维倾斜摄影,将航拍的图片进行三维建模;
[0161]
b、在无人机三维倾斜摄影模型上选取起点坐标和终点坐标,确定需要获取目标区域内危岩体地形的剖切线,并沿剖切线依次选取剖切线附近的多个测量点坐标;
[0162]
c、建立剖切线对应剖切面的平面方程;
[0163]
d、计算得到测量点投影到剖切面的投影坐标;
[0164]
e、设定地形剖面的拟合点,依据测量点的投影坐标判断对应地形的倒悬特征,根据判断结果获取拟合点的坐标;
[0165]
f、将获得的拟合点坐标依次连接成线得到剖切线位置的地形剖面。
[0166]
在本实施例中,是以某隧道出口的危岩体为例,通过该方法获取危岩体的典型剖面和微地貌;
[0167]
进行步骤a:使用无人机在隧道出口的上空进行三维倾斜摄影,获取足量的航拍图片,将航拍的图片进行三维建模,获得无人机三维倾斜摄影模型,即获得对应隧道出口区域的三维模型;
[0168]
进行步骤b:确定想要剖切危岩体的典型剖面,并通过人工在无人机三维倾斜摄影模型上点选两个点作为剖切线的起点坐标p0(412801.81,3453992.14,547.75)和终点坐标pn(412743.08,3453993.87,503.5);
[0169]
然后人工在无人机三维倾斜摄影模型上选取测量点pi,共选取了16个测量点pi,即
0<i<16,且i=1,2,3
…
),分别有p1(412798.55,3453991.96,549.18)、p2(412796.76,3453992.01,549.95)
……
p6(412787.74,3453992.58,550.87)、p7(412788.92,3453992.57,549)、p8(412790.68,3453992.63,547.27)、p9(412793.48,3453992.52,544.46)
……
p
16
(412744.67,3453996.2,505.42)、则终点坐标为p
17
,即n=17。
[0170]
进行步骤c:将起点坐标p0和终点坐标p
17
的坐标值代入点法式平面方程:a(x
n-x0)+b(y
n-y0)=0,可以得到:
[0171][0172]
假设b=1,则a=0.029456836,从而d=-ax
0-by0=-3466151.975;
[0173]
得到剖切面的一般式平面方程为:-0.379156668xn+y
n-3833409.127=0,平面的法相向量为(0.029456836,1,0)。
[0174]
进行步骤d:设测量点pi投影到剖切平面上的点为p
i’,坐标设为(x
i’,y
i’,z
i’)(0<i<17,且i=1,2,3
…
);pi与p
i’的连线与剖切面的法向量平行,两线的斜率相等,得到:设定一个中间值ti(0<i<17,且i=1,2,3
…
),换算得到:x
i-x
i’=ati,y
i-y
i’=bti,且zi=z
i’,进一步推出x
i’=xi–
ati,y
i’=yi–
bti,结合坐标p
i’在剖切面内,则axi+byi+d=0,得到
[0175]
则x1’
=x1–
at1=412798.56,y1’
=y1–
bt1=3453992.24,得到p1’
的坐标为(412798.56,3453992.24,549.18);
[0176]
以此类推获得p2’
(412796.77,3453992.29,549.95)
……
p6’
(412787.74,3453992.55,550.87)、p7’
(412788.92,3453992.52,549)、p8’
(412790.68,3453992.47,547.27)、p9’
(412793.48,3453992.39,544.46)
……
p
16’(412744.6,3453993.83,505.42)。
[0177]
进行步骤e:设地形剖面的拟合点为
△
pi,坐标设为(li,hi)(0≤i≤17,且i=1,2,3
…
),h0=547.75,设l0=0,根据步骤c求的投影坐标,计算相邻两个测量点的投影坐标在剖切面的水平增量:
[0178]
起点坐标与第一个测量点的投影坐标的水平增量:
[0179][0180]
将起点坐标与第一个测量点的投影坐标p1’
通过判断式二进行判断,判断式二为:
[0181]
(x
17-x0)(x1’‑
x0)≤0且(y
17-y0)(y1’‑
y0)≤0;
[0182]
不满足判断式二的要求,得到拟合点
△
p1的坐标为:
[0183]
l1=l0+
△
l1=3.25;
[0184]
h1=z1’
=549.18;
[0185]
第一个测量点的投影坐标p1’
与相邻第二个测量点的投影坐标p2’
的水平增量:
[0186]
[0187]
将第一个测量点的投影坐标p1’
与相邻第二个测量点的投影坐标p2’
通过判断式一进行判断,判断式一为:
[0188]
(x
17-x0)(x2’‑
x1’
)≤0且(y
17-y0)(y2’‑
y1’
)≤0;
[0189]
不满足判断式一的要求,得到拟合点
△
p2的坐标为:
[0190]
l2=l1+
△
l2=5.04;
[0191]
h2=z2’
=549.95;
[0192]
以此类推,计算
△
p3~
△
p
16
的坐标,其中,第六个测量点的投影坐标p6’
与相邻第七个测量点的投影坐标p7’
的水平增量:
[0193][0194]
将第六个测量点的投影坐标p6’
与相邻第七个测量点的投影坐标p7’
通过判断式一进行判断,判断式一为:
[0195]
(x
17-x0)(x7’‑
x6’
)≤0且(y
17-y0)(y7’‑
y6’
)≤0;
[0196]
满足判断式一的要求,得到拟合点
△
p7的坐标为:
[0197]
l7=l6‑△
l7=12.9;
[0198]
h7=z7’
=549;
[0199]
第七个测量点的投影坐标p7’
与相邻第八个测量点的投影坐标p8’
的水平增量:
[0200][0201]
将第七个测量点的投影坐标p7’
与相邻第八个测量点的投影坐标p8’
通过判断式一进行判断,判断式一为:
[0202]
(x
17-x0)(x8’‑
x7’
)≤0且(y
17-y0)(y8’‑
y7’
)≤0;
[0203]
满足判断式一的要求,得到拟合点
△
p8的坐标为:
[0204]
l8=l7‑△
l8=11.14;
[0205]
h8=z8’
=547.27;
[0206]
第八个测量点的投影坐标p8’
与相邻第九个测量点的投影坐标p9’
的水平增量:
[0207][0208]
将第六个测量点的投影坐标p6’
与相邻第七个测量点的投影坐标p7’
通过判断式一进行判断,判断式一为:
[0209]
(x
17-x0)(x7’‑
x6’
)≤0且(y
17-y0)(y7’‑
y6’
)≤0;
[0210]
满足判断式一的要求,得到拟合点
△
p9的坐标为:
[0211]
l9=l8‑△
l9=8.34;
[0212]
h9=z9’
=544.46;
[0213]
最后一个测量点的投影坐标p
16’与终点坐标p
17
的水平增量:
[0214][0215]
将最后一个测量点的投影坐标p
16’与终点坐标p
17
通过判断式三进行判断,判断式
三为:
[0216]
(x
17-x0)(x
17-x
16’)≤0且(y
17-y0)(y
17-y
16’)≤0;
[0217]
不满足判断式三的要求,得到拟合点
△
p
17
的坐标为:
[0218]
l
17
=l
16
+
△
l
17
=58.75;
[0219]h17
=z
17
=503.5;
[0220]
得到拟合点的坐标:
△
p0(0,547.75)、
△
p1(3.25,549.18)、
△
p2(5.04,549.95)
……△
p6(14.08,550.87)、
△
p7(12.90,549)、
△
p8(11.14,547.27)、
△
p9(8.34,544.46)
……△
p
16
(57.23,505.42)、
△
p
17
(58.75,503.5);
[0221]
进行步骤f:将得到的拟合点
△
p0~
△
p
17
的坐标在xoy平面内通过直线连接,得到剖切线位置的地形剖面。
[0222]
如图8所示,由于测量点投影坐标的p6’
至p9’
之间均满足判断式一的条件,所以该处危岩体具有明显倒悬的地形特征,从而清晰地确定危岩体的类型,利于后续的稳定性计算,若按照以前通过剖切大比例尺地形图获得危岩体剖面,得到如图9所示的地形剖面,不仅无法准确获知危岩体的地形地貌,还无法体现明显倒悬的地形特征,导致后续的计算误差较大。
[0223]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1