驾驶员状态判断方法、装置及驾驶员监控系统与流程
本技术涉及人员监控,尤其涉及一种驾驶员状态判断方法、装置及驾驶员监控系统。
背景技术:
1、在驾驶领域中,由于驾驶员的某些行为,会对车辆的安全行驶产生影响,因此,对驾驶员的行为进行识别,并在识别出驾驶员的行为为不利于车辆的安全行驶的行为时,及时采取措施,以尽可能的降低驾驶员的行为对车辆的安全行驶的影响,是非常必要的。
2、现有驾驶员监控系统(driver monitor system,dms)对于驾驶员监控任务中的分类任务,如异常动作识别(例如识别驾驶员抽烟或打电话等),一般通过神经网络输出的置信度,来对神经网络输出的预测结果进行判定。例如在dms识别驾驶员抽烟时,通过神经网络输出的置信度,判断神经网络输出的预测结果是否可信,如上述置信度值越低,神经网络输出的预测结果可信度越低。这样,在后续处理中,对应置信度低的预测结果就会被fail掉,从而,提升了后续基于神经网络输出的预测结果来判断驾驶员状态的准确性。
3、然而,对于驾驶员监控任务中的回归任务(例如人脸关键点、视线、头部姿态估计等),dms无法判断神经网络输出的预测结果是否可信,即无法对神经网络输出的预测结果进行判定,从而,导致后续基于神经网络输出的预测结果来判断驾驶员状态的准确性较低,无法及时识别出驾驶员不利于车辆的安全行驶的行为,大大增加车辆发生事故的概率。
技术实现思路
1、为解决现有技术中存在的问题,本技术提供一种驾驶员状态判断方法、装置及驾驶员监控系统。
2、第一方面,本技术实施例提供一种驾驶员状态判断方法,所述方法包括:
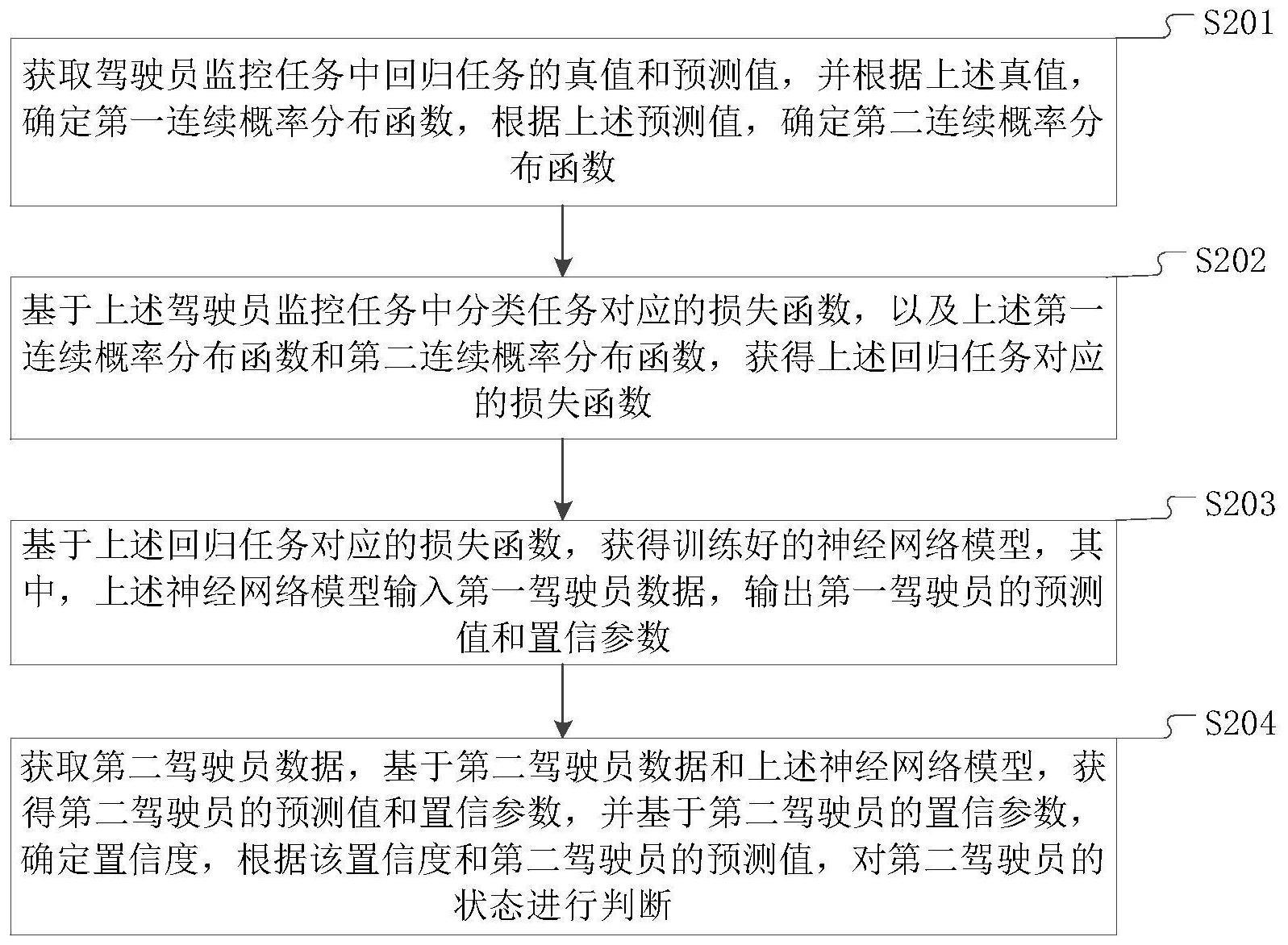
3、获取驾驶员监控任务中回归任务的真值和预测值,并根据所述真值,确定第一连续概率分布函数,根据所述预测值,确定第二连续概率分布函数;
4、基于所述驾驶员监控任务中分类任务对应的损失函数,以及所述第一连续概率分布函数和所述第二连续概率分布函数,获得所述回归任务对应的损失函数;
5、基于所述回归任务对应的损失函数,获得训练好的神经网络模型,其中,所述神经网络模型输入第一驾驶员数据,输出所述第一驾驶员的预测值和置信参数;
6、获取第二驾驶员数据,基于所述第二驾驶员数据和所述神经网络模型,获得所述第二驾驶员的预测值和置信参数,并基于所述第二驾驶员的置信参数,确定置信度,根据所述置信度和所述第二驾驶员的预测值,对所述第二驾驶员的状态进行判断。
7、在一种可能的实现方式中,所述基于所述驾驶员监控任务中分类任务对应的损失函数,以及所述第一连续概率分布函数和所述第二连续概率分布函数,获得所述回归任务对应的损失函数,包括:
8、基于所述分类任务对应的损失函数,以及所述第一连续概率分布函数和所述第二连续概率分布函数,获得第一损失函数;
9、根据所述第一损失函数和所述回归任务的真值,确定第二损失函数;
10、对所述第二连续概率分布函数进行参数化,基于参数化后的第二连续概率分布函数和所述第二损失函数,获得所述回归任务对应的损失函数。
11、在一种可能的实现方式中,所述对所述第二连续概率分布函数进行参数化,包括:
12、基于拉普拉斯分布或高斯分布,对所述第二连续概率分布函数进行参数化。
13、在一种可能的实现方式中,所述基于所述回归任务对应的损失函数,获得训练好的神经网络模型,包括:
14、将所述回归任务对应的损失函数设置为预设初始神经网络模型的损失函数;
15、将所述第一驾驶员数据,输入所述预设初始神经网络模型,计算所述预设初始神经网络模型的损失函数的值;
16、根据所述损失函数的值,对所述预设初始神经网络模型进行调整,以使调整后的预设初始神经网络模型的损失函数的值满足预设条件;
17、基于所述调整后的预设初始神经网络模型,得到所述训练好的神经网络模型。
18、在一种可能的实现方式中,在所述将所述回归任务对应的损失函数设置为预设初始神经网络模型的损失函数之前,还包括:
19、根据预设神经网络模型收敛方法,对所述回归任务对应的损失函数进行处理,获得第三损失函数;
20、对所述第三损失函数中的每一项分别设置损失权重,获得第四损失函数;
21、所述将所述回归任务对应的损失函数设置为预设初始神经网络模型的损失函数,包括:
22、将所述第四损失函数设置为所述预设初始神经网络模型的损失函数。
23、在一种可能的实现方式中,所述根据所述置信度和所述第二驾驶员的预测值,对所述第二驾驶员的状态进行判断,包括:
24、判断所述置信度是否大于预设阈值,所述预设阈值根据用于判断驾驶员状态的神经网络输出的驾驶员的预测值对应的置信度最小值确定;
25、若所述置信度大于所述预设阈值,则根据所述第二驾驶员的预测值,对所述第二驾驶员的状态进行判断。
26、在一种可能的实现方式中,所述第二驾驶员的置信参数根据所述神经网络模型的标准差确定;
27、所述基于所述第二驾驶员的置信参数,确定置信度,包括:
28、对所述第二驾驶员的置信参数进行非线性映射处理,获得所述置信度。
29、在一种可能的实现方式中,第一连续概率分布函数为狄利克雷函数。
30、第二方面,本技术实施例提供一种驾驶员状态判断装置,所述装置包括:
31、函数确定模块,用于获取驾驶员监控任务中回归任务的真值和预测值,并根据所述真值,确定第一连续概率分布函数,根据所述预测值,确定第二连续概率分布函数;
32、函数获得模块,用于基于所述驾驶员监控任务中分类任务对应的损失函数,以及所述第一连续概率分布函数和所述第二连续概率分布函数,获得所述回归任务对应的损失函数;
33、模型获得模块,用于基于所述回归任务对应的损失函数,获得训练好的神经网络模型,其中,所述神经网络模型输入第一驾驶员数据,输出所述第一驾驶员的预测值和置信参数;
34、状态判断模块,用于获取第二驾驶员数据,基于所述第二驾驶员数据和所述神经网络模型,获得所述第二驾驶员的预测值和置信参数,并基于所述第二驾驶员的置信参数,确定置信度,根据所述置信度和所述第二驾驶员的预测值,对所述第二驾驶员的状态进行判断。
35、在一种可能的实现方式中,所述函数获得模块,具体用于:
36、基于所述分类任务对应的损失函数,以及所述第一连续概率分布函数和所述第二连续概率分布函数,获得第一损失函数;
37、根据所述第一损失函数和所述回归任务的真值,确定第二损失函数;
38、对所述第二连续概率分布函数进行参数化,基于参数化后的第二连续概率分布函数和所述第二损失函数,获得所述回归任务对应的损失函数。
39、在一种可能的实现方式中,所述函数获得模块,具体用于:
40、基于拉普拉斯分布或高斯分布,对所述第二连续概率分布函数进行参数化。
41、在一种可能的实现方式中,所述模型获得模块,具体用于:
42、将所述回归任务对应的损失函数设置为预设初始神经网络模型的损失函数;
43、将所述第一驾驶员数据,输入所述预设初始神经网络模型,计算所述预设初始神经网络模型的损失函数的值;
44、根据所述损失函数的值,对所述预设初始神经网络模型进行调整,以使调整后的预设初始神经网络模型的损失函数的值满足预设条件;
45、基于所述调整后的预设初始神经网络模型,得到所述训练好的神经网络模型,
46、在一种可能的实现方式中,所述模型获得模块,具体用于:
47、根据预设神经网络模型收敛方法,对所述回归任务对应的损失函数进行处理,获得第三损失函数;
48、对所述第三损失函数中的每一项分别设置损失权重,获得第四损失函数;
49、将所述第四损失函数设置为所述预设初始神经网络模型的损失函数。
50、在一种可能的实现方式中,所述状态判断模块,具体用于:
51、判断所述置信度是否大于预设阈值,所述预设阈值根据用于判断驾驶员状态的神经网络输出的驾驶员的预测值对应的置信度最小值确定;
52、若所述置信度大于所述预设阈值,则根据所述第二驾驶员的预测值,对所述第二驾驶员的状态进行判断。
53、在一种可能的实现方式中,所述第二驾驶员的置信参数根据所述神经网络模型的标准差确定;
54、所述状态判断模块,具体用于:
55、对所述第二驾驶员的置信参数进行非线性映射处理,获得所述置信度。
56、在一种可能的实现方式中,第一连续概率分布函数为狄利克雷函数。
57、第三方面,本技术实施例提供一种驾驶员监控系统,包括:
58、处理器;
59、存储器;以及
60、计算机程序;
61、其中,所述计算机程序被存储在所述存储器中,并且被配置为由所述处理器执行,所述计算机程序包括用于执行如第一方面所述的方法的指令。
62、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序使得服务器执行第一方面所述的方法。
63、第五方面,本技术实施例提供一种计算机程序产品,包括计算机指令,所述计算机指令被处理器执行第一方面所述的方法。
64、本技术实施例提供的驾驶员状态判断方法、装置及驾驶员监控系统,该方法通过获取驾驶员监控任务中回归任务的真值和预测值,进而,根据该真值,确定第一连续概率分布函数,根据该预测值,确定第二连续概率分布函数,并基于分类任务对应的损失函数,以及上述第一连续概率分布函数和第二连续概率分布函数,获得上述回归任务对应的损失函数,从而,基于该损失函数,获得训练好的神经网络模型,基于该模型和驾驶员数据,获得驾驶员的预测值和置信度,对驾驶员的状态进行判断,解决现有对于回归任务,dms无法对神经网络输出的预测结果进行判定,从而导致后续基于神经网络输出的预测结果来判断驾驶员状态的准确性较低的问题。而且,本技术实施例由于提高了驾驶员状态判断的准确率,能够及时识别出驾驶员不利于车辆的安全行驶的行为,大大降低车辆发生事故的概率。
- 还没有人留言评论。精彩留言会获得点赞!