基于点云的带电主电线检测方法及装置与流程
1.本发明属于高压线缆在线检测技术领域,特别是一种基于点云的带电主电线检测方法及装置。
背景技术:
2.带电作业机器人是一种在高空中代替人工完成高压线缆搭接和拆卸等一系列高危作业的特种机器人,与传统的人工作业相比,其大大提高了作业安全和效率。带电作业机器人在作业过程中需要获得作业主线线缆的精确方向和位置,这依赖配备的面阵激光。但是面阵激光在照射主线线缆时,会受到阳光的干扰,采集的点云数据会包含有大量的点云噪声,影响了对主线线缆的准确检测。
3.而现有的激光点云主线线缆检测算法主要包括:基于区域增长算法的主线线缆检测方法、基于点云直线拟合算法的直线线缆检测方法和基于深度学习的点云主线检测方法。
4.基于区域增长算法的主线线缆检测方法,通过一个种子点云不断的扩散增长,找到一块连通区域内的点云,对该段内的点云使用样条曲线去拟合。但当主线附近出现大块的连接点云时,这种方法仍会认为干扰点云块是主线的一部分。
5.基于点云直线拟合算法的直线线缆检测方法,主要是使用最小二乘法或ransc算法,将直线拟合出来。这种方法对噪声点云较少的情况能够较好的拟合,但出现噪声数据过多,在使用最小二乘法或者ransc算法去拟合直线时,会使得拟合的直线偏向噪声的位置。
6.基于深度学习的点云主线检测方法,这种方法使用深度学习来训练一个点云分割模型完成主线的提取。但是训练深度学习点云分割模型需要采集大量的训练数据以及需要大量的时间去训练一个效果较好的模型。另外,在模型推理过程中非常消耗计算资源,导致检测时间过于慢。
7.总之,现有技术存在的问题是:带电作业机器人使用面阵激光识别高压线缆主线时,由于太阳光的干扰,主线附近出现噪声点云,使得对主线线缆的识别精度低。
技术实现要素:
8.本发明的目的在于提供一种基于点云的带电主电线检测方法,抗干扰能力强、识别精度高。
9.本发明的另一目的在于提供一种抗干扰能力强、识别精度高的基于点云的带电主电线检测装置。
10.实现本发明目的的技术解决方案为:
11.一种基于点云的带电主电线检测方法,包括以下步骤:
12.(10)点云前处理:对从主线线缆区域范围内获取的三维点云进行直通滤波、离群点去除和体素滤波前处理,提取作业范围内不含噪声的目标点云;
13.(20)点云霍夫变换滤:使用霍夫变换,对前处理后的点云进一步滤波,提取有主线
线缆特征的有效点云;
14.(30)有效点云后处理:对所述有效点云分段,对每段点云进行dbascan聚类,对每类点云进行直线拟合,对拟合直线进行拟合投票,根据拟合投票结果,统计出相关联的点云并拟合出主线。
15.实现本发明另一目的的技术解决方案为:
16.一种基于点云的带电主电线检测装置,包括:
17.点云前处理模块,用于对从主线线缆区域范围内获取的三维点云进行直通滤波、离群点去除和体素滤波前处理,提取作业范围内不含噪声的目标点云;
18.点云霍夫变换滤模块,用于使用霍夫变换,对前处理后的点云进一步滤波,提取有主线线缆特征的有效点云;
19.有效点云后处理模块,用于对所述有效点云分段,对每段点云进行dbascan聚类,对每类点云进行直线拟合,对拟合直线进行拟合投票,根据拟合投票结果,统计出相关联的点云并拟合出主线。本发明与现有技术相比,其显著优点为:
20.1、抗干扰能力强、识别精度高:本发明采用点云的前处理,提高了提取的点云质量;通过只提取有主线线缆特征的点云做主线拟合,可以在太阳照射干扰的情况,精确的识别出主线线缆的方向,有效地提升了带电作业机器人的作业可靠性,抗干扰能力强、识别精度高。
21.下面结合附图和具体实施方式对本发明作进一步的详细描述。
附图说明
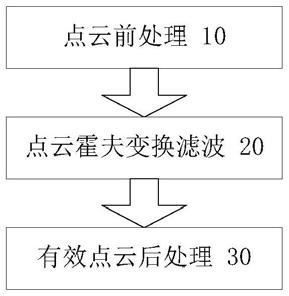
22.图1是本发明基于点云的带电主电线检测方法的主流程图。
23.图2是面阵激光的坐标系的结构示意图。
24.图3是图1中点云前处理步骤的流程图。
25.图4是图1中点云霍夫变换滤步骤的流程图。
26.图5是图1中有效点云后处理步骤的流程图。
27.图6是采用现有技术区域增长算法和最小二乘法拟合出的主线位置示例。
28.图7是采用本发明基于点云的带电主电线检测方法检测出的主线位置示例。
具体实施方式
29.如图1所示,为本发明基于点云的带电主电线检测方法的主流程图。本发明方法适用于带电作业机器人,该机器人配备了用于采集主线线缆点云数据面阵激光,面阵激光安装在机器人手臂上,作业场景中,主线线缆在机器人的上方,控制机器人手臂上举采集点云数据,使用本发明方法得到主线的位置信息,调用抓取执行器执行。图2为面阵激光的坐标系,照射角度为主线的下方,容易受到太阳的干扰。
30.如图1所示,本发明基于点云的带电主电线检测方法,包括以下步骤:
31.(10)点云前处理:对从主线线缆区域范围内获取的三维点云进行直通滤波、离群点去除和体素滤波前处理,提取作业范围内不含噪声的目标点云;
32.本步骤对原始点云数据做直通滤波处理,提取出有效作业范围的点云,再统计点云的密度,去除离群点的干扰,最后对采用体素滤波来降低点云的规模。
33.如图3所示,所述(10)点云前处理步骤包括:
34.(11)直通滤波:通过面阵激光获取主线线缆区域范围内的三维点云,采用直通滤波器进行直通滤波,提取感兴趣区域r,r∈(-x,-y,-z)~(x,y,z)。
35.(12)离群点去除:从现有点云中去除干扰点,统计r区域内的每个点云r为半径的领域内的点云个数s,当s<n时,认为该点为离群点,从r中去除该点(注:r,n为超参数)。
36.(13)体素滤波:使用(leaf,leaf,leaf)大小的网格对r进行体素滤波,得到v点云,leaf为体素的大小;
37.通过体素滤波,可以降低点云的数量,提升运算速度。
38.(20)点云霍夫变换滤:使用霍夫变换,对前处理后的点云进一步滤波,提取有主线线缆特征的有效点云。
39.本步骤将点云压缩到xoy平面,转换到图像坐标系下得到灰度图,灰度值为该像素范围内的点云数量,再对灰度图使用累计概率霍夫变换(ppht)检测直线,对于检测出的多条直线,考虑到主线有一定的宽度,检测到的直线不止一条的平行直线,所有对检测到的直线按照斜率进行dbscan聚类,提取出每类中相近的平行直线超过两条的直线加入到主线列表中,取列表中最长的直线为最佳主线。将选出的直线转换到三维空间中成一个面,计算点云到这个面的距离,提取出这个面领域内的点云。
40.如图4所示,所述(20)点云霍夫变换滤步骤包括:
41.(21)点云转换:将体素滤波后的三维v点云压缩成二维图像,将点云转换成灰度图;
42.具体包括:将v点云投射到xoy平面(如图),将三维点云压缩成二维图像,设置图像的大小为(w,h),将点云中每个点坐标(xi,yi,zi)转换到图像坐标系下坐标统计图像每个坐标(i,j)中包含点云个数p
ij
,p
max
为p
ij
中的最大值,计算当前图像坐标(i,j)的像素值为这样点云被转换成灰度图。
43.(22)灰度图最佳直线检测:采用累计概率霍夫变换方法检测所述灰度图,得到多条直线,再进行聚类、统计,选取统计出的所有类主线中最长的直线为最佳直线。
44.具体为:
45.对二维图像使用累计概率霍夫变换(ppht)检测出直线,对主线对检测出的多条直线用dbsacan算法对斜率进行聚类,设定角度阈值angle
thresh
和距离阈值angle
thresh
,计算每类中两两直线的角度angle
ij
,当angle
ij
≤angle
thresh
,认为两条直线近似于平行,再计算两条直线的距离d
ij
,当d
ij
≤d
thresh
,认为这两条直线为相近的平行直线,当计算每类中的近似的平行直线数量超过两条时,认为这些相似平行主线属于一类主线,选取统计出的所有类主线中最长的直线为最佳直线。
46.(23)有效点云提取:提取直线附近的有效点云,形成有效点云集合h。
47.具体为:提取直线附近的有效点云,将图像中检测出的直线line转换到实际坐标系中的一个面ax+by+d=0,计算v点云中点(xi,yi,zi)到面的距离当d<dthresh
,提取点云形成新的点云集合h。
48.(30)有效点云后处理:对所述有效点云分段,对每段点云进行dbascan聚类,对每类点云进行直线拟合,对拟合直线进行拟合投票,根据拟合投票结果,统计出相关联的点云并拟合出主线。
49.对步骤(20)提取的有效点云进行沿平面方向分段处理,统计每段点云沿z方向的方差σ,去除方差较大的干扰点云。
50.对上步处理后的分段点云使用dbscan算法聚类,再分别对每一类点云用最小二乘法拟合出直线的方向向量和起始点。
51.再对上步中所有的拟合直线进行投票,投票分数为任意两条直线的角度和z方向距离的加权,当分数大于阈值时,两条直线各得一票,统计完取出票数最高的直线和与它投票分数大于阈值的直线的点云。
52.对上步中统计出的点云整体做一次最小二乘法拟合,得到主线线缆的方向和位置,用于后续的作业流程。
53.如图5所示,所述(30)有效点云后处理步骤包括:
54.(31)有效点云分段:根据主线线缆的走向和属性,将h点云沿着面的方向分为n段,计算每一段点云z方向的方差σ,当σ>σ
thresh
,从h中移除该段点云,再对每一段点云分别进行如下处理。
55.(32)分段直线拟合:对每段点云使用radius半径,n
min
最小聚类点数的dbascan算法进行聚类,得到m团类点云,对这m团点云分别使用最小二乘法拟合出直线,得到直线的参数(line
start
,line
end
,k),其中line
start
为拟合直线起始点,line
end
为拟合直线结束点,k为直线方向向量,计算结束后得到组参数。
56.(33)主线拟合:根据组参数的k进行投票,用余弦距离和两类点云z方向的偏差的加权衡量两条直线的相似度,计算这些直线中两两之间的得分
[0057][0058]
当score>score
thresh
时,两条直线的票数分别加一,取投票数最多的线点云和与它计算得分达到阈值的线点云组成新的点云s,对点云s使用最小二乘法拟合出最终的直线方向和位置。
[0059]
所拟合出的主线方向和位置用于传给机器人,完成主线的精确定位。
[0060]
图6、图7中白色点为点云,直线为检测到的主线,如图6所示,是采用区域增长算法和最小二乘法拟合出的主线位置,可以看到主线附近的大块点云已经把主线的正确方向掰弯,图7是本发明方法的检测结果,能够较好的拟合出主线的方向和位置。
[0061]
本发明基于点云的带电主电线检测装置,用于实现前述基于点云的带电主电线检测方法,其包括:
[0062]
点云前处理模块,用于对从主线线缆区域范围内获取的三维点云进行直通滤波、离群点去除和体素滤波前处理,提取作业范围内不含噪声的目标点云;
[0063]
所述点云前处理模块包括:
[0064]
直通滤波单元,用于通过面阵激光获取主线线缆区域范围内的三维点云,采用直通滤波器进行直通滤波,提取感兴趣区域r,r∈(-x,-y,-z)~(x,y,z);
[0065]
离群点去除单元,用于从现有点云中去除干扰点,统计r区域内的每个点云r为半径的领域内的点云个数s,当s<n时,认为该点为离群点,从r中去除该点,r,n为超参数;
[0066]
体素滤波单元,用于使用(leaf,leaf,leaf)大小的网格对r进行体素滤波,得到v点云,leaf为体素的大小。
[0067]
点云霍夫变换滤模块,用于使用霍夫变换,对前处理后的点云进一步滤波,提取有主线线缆特征的有效点云;
[0068]
所述点云霍夫变换滤模块包括:
[0069]
点云转换单元,用于将体素滤波后的三维v点云压缩成二维图像,将点云转换成灰度图;
[0070]
灰度图最佳直线检测单元,用于采用累计概率霍夫变换方法检测所述灰度图,得到多条直线,再进行聚类、统计,选取统计出的所有类主线中最长的直线为最佳直线;
[0071]
有效点云提取单元,用于提取直线附近的有效点云,形成有效点云集合h。有效点云后处理模块,用于对所述有效点云分段,对每段点云进行dbascan聚类,对每类点云进行直线拟合,对拟合直线进行拟合投票,根据拟合投票结果,统计出相关联的点云并拟合出主线。
[0072]
所述有效点云后处理模块包括:
[0073]
有效点云分段单元,用于根据主线线缆的走向和属性,将h点云沿着面的方向分为n段,计算每一段点云z方向的方差σ,当σ>σ
thresh
,从h中移除该段点云,再对每一段点云分别进行如下处理;
[0074]
分段直线拟合单元,用于对每段点云使用radius半径,n
min
最小聚类点数的dbascan算法进行聚类,得到m团类点云,对这m团点云分别使用最小二乘法拟合出直线,得到直线的参数(line
start
,line
end
,k),其中line
start
为拟合直线起始点,line
end
为拟合直线结束点,k为直线方向向量,计算结束后得到组参数;
[0075]
主线拟合单元,用于根据组参数的k进行投票,用余弦距离和两类点云z方向的偏差的加权衡量两条直线的相似度,计算这些直线中两两之间的得分
[0076][0077]
当score>score
thresh
时,两条直线的票数分别加一,取投票数最多的线点云和与它计算得分达到阈值的线点云组成新的点云s,对点云s使用最小二乘法拟合出最终的直线方向和位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1