一种基于物质点法的流固耦合高效插值计算方法与流程
1.本发明涉及力学领域,更具体的说是涉及一种基于物质点法的流 固耦合高效插值计算方法。
背景技术:
2.求解流固耦合问题时,数据在流体网格和结构网格的插值传递至 关重要,因为流体和固体所用的离散方法一般不同(流体用有限体积 法,固体用有限元法),加上流体一般要考虑边界层,在变量梯度较 大的区域需要局部加密,导致流体网格比固体网格要密得多,在网格 插值后网格重构的过程,如果变形过大会出现单元面积、体积等出现 负数和不光滑、失真的现象,特便是大变形(断裂、穿透等)很容易 出现,计算中如果出现这种现象,计算程序就终止,一方面影响流固 耦合研究进展,另一方面影响流固耦合的工程化应用。因此,研究一 种流固耦合计算过程的高效插值方法意义重大。
技术实现要素:
3.有鉴于此,本发明提供了一种基于物质点法的流固耦合高效插值 计算方法,建立了基于物质点法的流固耦合数据交换机制,成功将物 质点法应用于流固耦合的分析中,其特点是不用划分网格,在精度和 效率不损失的前提下,可以适应大变形的计算中。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种基于物质点法的流固耦合高效插值计算方法,包括以下步 骤:
6.导入网格;
7.进行流体求解;
8.将流体求解结果插值到网格上,获得结构载荷;
9.求解结构力学方程,获得结构有限元网格节点位移以及位移插 值;
10.将结构壁面网格节点位移插值至流体网格边界,得到流体网格边 界节点的位移,重构网格后再进行流场计算;
11.输出计算结果。
12.其中,重构网格后需重新进行流体方程的求解,输出的计算结果 包括:流场边界处的速度矢量、压力及温度等。
13.可选的,进行流体求解前需要进行流体计算设置,包括设置物性 参数、计算模型、离散格式的选择、控制参数。
14.可选的,还包括获得每个网格的位移后,重构网格,得到新的网 格。
15.其中,网格重构的目的在于获取高质量网格,避免流体网格和固 体网格反复插值出现的单元面积、体积等出现负数和不光滑、失真的 现象,以及求解过程中的数值发散。
16.可选的,所述结构力学方程
[0017][0018]
其中,m为质量矩阵,c为阻尼矩阵,k为刚度矩阵,q为插之 后有限元网格上的气动
力,x为节点位移。
[0019]
可选的,将节点位移插值至网格,单元插值模式包括线单元、三 角形单元和四边形单元。
[0020]
可选的,所述线单元的形函数如下:
[0021]
n1(ξ1,ξ2)=ξ1=x/l;
[0022]
n2(ξ1,ξ2)=ξ2=1-ξ1;
[0023]
其中,ni(ξ1,ξ2)表示参数坐标表示的形函数,ξ1,ξ2表示参数坐标。
[0024]
可选的,所述三角单元的形函数如下
[0025][0026][0027][0028]
其中,a
t
=a1+a2+a3,ξ1,ξ2表示参数坐标;其中,n1(ξ1,ξ2)、 n2(ξ1,ξ2)、n3(ξ1,ξ2)表示三角形单元的3个形函数;
[0029]at
表示三角形单元的面积;
[0030][0031][0032][0033]
a1、b1、c1分别为待定常数,(x,y)为节点坐标;
[0034]
其中,各形函数可以理解为对应节点发生单位位移而其它节点不 动时,单元内的位移分布情况。
[0035]
可选的,所述四边形单元的形函数如下:
[0036]
n1(ξ1,ξ2)=(1-ξ1)(1-ξ2);
[0037]
n2(ξ1,ξ2)=ξ1(1-ξ2);
[0038]
n3(ξ1,ξ2)=ξ1ξ2;
[0039]
n4(ξ1,ξ2)=(1-ξ1)ξ2;
[0040]
ξ1,ξ2表示参数坐标。
[0041]
其中,n1(ξ1,ξ2)、n2(ξ1,ξ2)、n3(ξ1,ξ2)、n4(ξ1,ξ2)表示四边形单元的 4个形函数;ξ1,ξ2表示参数坐标。
[0042]
各形函数可以理解为对应节点发生单位位移而其它节点不动时, 单元内的位移分布情况。
[0043]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了 一种基于物质点法的流固耦合高效插值计算方法,无需划分网格,并 且在精度不损失的前提下计算效率比
常规的流固耦合计算要高,并且 能够避免常规计算方式中流体网格和固体网格反复插值出现的单元 面积、体积等出现负数和不光滑、失真的现象,因此可以有效解决工 程和科研中的流固耦合计算过程的数据传递问题,可以适应大变形的 计算中。
附图说明
[0044]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面 将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而 易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通 技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附 图获得其他的附图。
[0045]
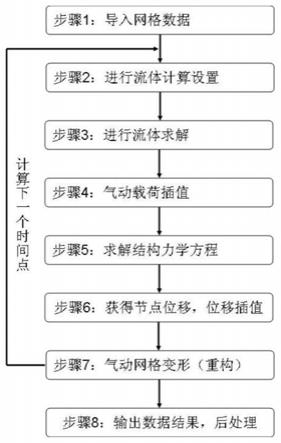
图1为本发明流固耦合的计算方法的详细步骤;
[0046]
图2为本发明网格数据/物理数据插值流程示意图;
[0047]
图3为本发明插值单边单元基函数参数示意图;
[0048]
图4为本发明插值三角形单元基函数参数示意图;
[0049]
图5为本发明插值四边形单元基函数参数示意图。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方 案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部 分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普 通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例, 都属于本发明保护的范围。
[0051]
本发明实施例公开了一种基于物质点法的流固耦合高效插值计 算方法,具体实施方式如下:
[0052]
如图1所示,首先导入网格数据,求解流体方程,获得流体网格 壁面压力信息,将此压力信息插值到结构网格壁面上,求解结构方程、 获得结构网格上的位移、将此位移插值到流体网格上,进行网格重构, 计算下一时间点或输出计算结果,返回求解流体方程直到计算终止。 计算步骤如下:
[0053]
步骤1导入网格数据,此步骤由第三方软件(如: ansys-icem,gridgen)完成并存成plot3d格式,结构模型网格由 ansa软件计算生成。
[0054]
步骤2进行流体计算设置,包括设置物性参数、计算模型、离散 格式的选择、控制参数等,此过程由公司自行开发的adi.simwork4.0 中的计算流体力学模块的参数设置界面上设置完成。
[0055]
步骤3进行流体求解,包括求解过程中的残差曲线观测,此过 程由公司自行开发的adi.simwork4.0中的计算流体力学模块完成。
[0056]
步骤4气动力插值,此过程将步骤3计算出的壁面气动力从流体 壁面插值到结构表面网格上,获得结构载荷。此过程自编程序完成。
[0057]
步骤5求解结构力学方程,获得结构有限元网格节点位移,此过 程编程完成,结构力学方程
[0058][0059]
其中(1)式中m为质量矩阵,c为阻尼矩阵,k为刚度矩阵, q为插之后有限元网格上
的气动力,x为节点位移。
[0060]
步骤6获得节点位移,位移插值,将步骤5求解出来的节点位 移再插值回流体网格上去,得到流体网格每个节点的位移。三种单元 插值的示意图可以如图3-图5所示,其中ξ1,ξ2为当地坐标。此 过程由自编程序完成。
[0061]
步骤7网格变形(重构),完成步骤6后,获得了每个网格气动 单元的位移,然后进行气动网格重构,并得到新的气动网格。此过程 由自编程序完成。
[0062]
步骤8输出计算结果或返回步骤3进行下一时间点计算,进行 后处理,此过程由公司自行开发的simwork4.0后处理功能或第三方 软件完成,如tecplot等。
[0063]
如图2-5所示,步骤6中插值时由于气动网格和结构网格一般由 不同的前处理器生成,且网格和数据格式类型很不一致,由于本插值 程序不兼容其他数据格式,需要将插值前数据转化为ddf格式,插 值后再转化为其他格式,数据接口由自编程完成,具体的过程如下:
[0064]
ⅰ
)将目标网格数据及源网格数据、物理数据等转化为ddf格 式。
[0065]
ⅱ
)由目标网格数据和源网格数据生成插值转化矩阵。
[0066]
ⅲ
)插值程序进行插值。
[0067]
ⅳ
)生成目标网格ddf格式数据。
[0068]
ⅴ
)将目标网格上的ddf格式数据进行转换
[0069]
ⅵ
)得到目标网格上的数据。
[0070]
插值过程简述如下:
[0071]
插值时从源网格上找出离每个目标网格节点距离最近的单元,然 后找出目标节点到该单元的最短距离点(投影点),用该投影点的物 理量来表示目标点上的物理量,投影点上的物理量用所在单元的形函 数求得(如要将气动网格节点上的气动荷载传到结构节点上,结构节 点便是目标节点,气动网格为源网格)。由于网格只是对曲面几何的 近似逼近,结构网格与气动网格疏密程度一般不同,所以目标节点一 般不在某个源网格单元内。然后用形函数计算投影点上的物理量,将 其近似作为目标点上的物理量。
[0072]
对于源网格单元,可以用参数坐标和节点物理坐标表示其它点的 物理坐标,其表达式如(2)式
[0073][0074]
其中,(2)中的表示单元内任意点j的物理坐标, 表示单元节点物理坐标,i表示单元节点编号,ni(ξ1,ξ2)表示参数 坐标表示的形函数,ξ1,ξ2表示参数坐标。对于结构几何表面插值 时线单元、三角形单元和四边形单元足以满足要求,其三者的形函数 分别为:
[0075]
线单元的形函数
[0076]
n1(ξ1,ξ2)=ξ1=x/l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0077]
n2(ξ1,ξ2)=ξ2=1-ξ1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0078]
三角形单元的形函数
[0079][0080][0081][0082]
其中:a
t
=a1+a2+a3[0083]
四边形单元的形函数
[0084]
n1(ξ1,ξ2)=(1-ξ1)(1-ξ2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0085]
n2(ξ1,ξ2)=ξ1(1-ξ2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0086]
n3(ξ1,ξ2)=ξ1ξ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0087]
n4(ξ1,ξ2)=(1-ξ1)ξ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0088]
目标点的投影坐标应该满足式(12),其中目标点的物理坐标, 为已知量。
[0089][0090]
由极值点出的导数为0可得投影点满足的等式约束方程,如式 (13)
[0091][0092]
对于线单元和三角形单元方程(13)为一个线性方程组,直接用求 解线性方程组的方法可得到投影点的参数坐标。对于四边形单元,方 程为双线性方程组,需要用牛顿-拉夫逊方法求解。对于三角形单元 将式(5-7)代入方程(13)可得线性方程组如下方程(14)。
[0093][0094]
一旦求得了目标点在源单元中的投影点,便可用形函数求得投影 点的相应物理量,如式(15)
[0095][0096]
其中为投影点上的物理量,可将其作为目标点上的物理 量;为源单元节点上的物理量。比如:可为结构气动单元节点 上的位移量。将方程(16)写成矩阵形式,如式(16)
[0097]
[fa]=[t
as
][fs]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0098]
其中,
[0099]
对于流固耦合问题,主要涉及到将结构表面节点上的位移插值到 气动表面节点上,然后将气动表面节点上的气动荷载插值到结构表面 节点上,整个过程如(17-20)式所示。方程(17)表示结构变形后的气动 力计算,(18)为气动网格节点上的气动力向结构网格传递,(19)为通 过结构方程求解结构位移,(20)表示将结构网格节点上的位移传递到 气动网格节点上。
[0100][0101][0102][0103][0104]
为了保证数据传递过程的精度,首先得保证传递过程中功守恒。 由虚功原理可得:
[0105][0106]
将(18)代入(21)式得:
[0107][0108]
比对方程(22)和方程(18)可得:
[0109]
[t
sa
]=[t
as
]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(23)
[0110]
方程(23)是一个重要的结论,它表明从结构网格到气动网格的传 递矩阵与从气动网格到结构网格的传递矩阵互为转置矩阵。
[0111]
上述插值格式也能保证插值前气动网格上的总合力等于插值后 结构网格上的总合力,如方程(24):
[0112][0113]
由于气动网格和结构网格不能完全切合,所以力矩传递时会有相 应的精度损失。
下面对此做简要说明:
[0114][0115]
方程(25)中的为气动网格节点在结构网格上的投影点到矩心 的距离,而非气动网格节点到矩心的距离,两者的差别是由于气动表 面与结构网格表面不完全切合造成的,如式(26)。
[0116][0117]
注:如果结构太简化,否则该方法插值的效果会不光滑。在做模 型时尽量保证气动外形和结构外形一致,有必要时在结构模型上做一 些虚拟单元(不增加结构的刚度和质量,只是保证气动外形和结构外 形一致,方便插值)来弥补其不足。
[0118]
上面全部说明了一种流固耦合计算的全部过程以及在计算中新 的插值技术为了验证这种插值的有效性,我们选取了f-16战斗机作 为算例,其几何模型使用公开的数据。结构模型由机身、机翼、挂架 和挂载四部分组成,机身、挂架和挂载都采用四节点壳单元,材料属 性见表1;采用集中质量元来模拟挂架和挂载的质量特性(其属性如 表2);机翼分为三部分,根部、挂架部分和尖部,分别采用四节点 壳单元,材料属性如表3。气动表面网格采用结构化的多块网格,总 数为344块,网格节点数为106万。飞行条件为ma数0.85、攻角2.12 度、侧滑角0度、来流速度为279.1m/s、高度为2436m。
[0119]
s1:利用商业软件分别生成结构外形网格和气动外形网格,此过 程由ansa和ansys-icem软件完成。
[0120]
s2进行气动力计算,进行插值计算出结构模态,此过程由公司 研制的simwork4.0完成气动力计算,进行插值,导入nastran计 算结构模态。
[0121]
s3将结构模态(取前八阶模态)插值到气动网格上。
[0122]
s4输出结果文件,利用simwork4.0进行后处理。
[0123]
通过计算验证,并与实验结果进行对标,证实了我们建立的流固 耦合分析的一般方法和新的插值方法的正确性和可执行性。
[0124]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现 或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来 说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的 精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被 限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新 颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1