一种基于3D模型的泵车姿态展示与控制方法与流程
一种基于3d模型的泵车姿态展示与控制方法
技术领域
1.本发明涉及一种基于3d模型的泵车姿态展示与控制方法,属于工程机械技术领域。
背景技术:
2.随着工业互联网技术的发展,工业化进行的加速,工程机械行业的设备联网已经广泛应用到实际生产中。目前,越来越多的工程机械厂家开始探索在危险作业场景下,如何解决作业人员安全问题,其中针对工程机械的远程遥控系统便是当下主要的解决方案。
3.远程遥控系统,一般情况下有以下几部分组成:
4.首先是安装在工程机械车辆上的多个角度的摄像头,给远程操控的驾驶员提供在真实驾驶舱内的视角;
5.其次是远程操控台,其设计一般情况下接近真实驾驶舱;
6.然后是上位机软件,用来显示视频和工况数据,配合操控台,给驾驶员一种在现场操控的感觉;
7.最后是现场声音和震动反馈等功能,用于模拟真实环境。
8.传统工程车辆远程遥控系统中,远程驾驶员通过观察上位机上的视频,在操控台上操作来模拟真实驾驶环境,远程遥控工程车辆作业。但是对于工程机械车辆本身姿态的监控,由于人员远离危险现场,目前只能通过几个传感器数值来查看,缺乏通过第三人称的直观视角。同时,在复杂作业环境中进行远程操控,对于驾驶员来说是一个挑战。
技术实现要素:
9.本发明的目的在于克服现有技术中的不足,提供一种基于3d模型的泵车姿态展示与控制方法,以解决现有技术中的不足。
10.为达到上述目的,本发明是采用下述技术方案实现的:
11.第一方面,本发明提供了一种基于3d模型的泵车姿态展示与控制方法,应用于泵车,包括:
12.接收上位机发送的移动指令并解析报文;
13.执行指令动作,采集执行数据;
14.发送执行数据至上位机;
15.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
16.进一步的,所述3d模型接收移动指令时具有三种方式,分别为:
17.通过鼠标直接拖动3d模型中泵车臂或车身;
18.通过鼠标点击选中3d模型中泵车臂或车身,再点击控制区域按钮对选中的部位进行角度调整,模型跟随点击操作同步移动;
19.通过鼠标点击选中3d模型中泵车臂或车身,再在设置区域输入角度值,模型跟随角度变化同步移动。
20.进一步的,所述3d模型接收到移动指令和确认指令后,3d模型复原为泵车实际姿态,再发送确认指令至上位机。
21.进一步的,所述3d模型具有控制模式和展示模式,控制模式下,接收移动指令,并进行反馈,展示模式下,跟随泵车发送的执行数据进行移动,实时展示泵车实际姿态,当3d模型结束接收移动指令时,3d模型及时复原到泵车实际的姿态。
22.进一步的,所述执行数据包括泵车的各项工况数据,各个角度数据。
23.第二方面,本发明提供一种基于3d模型的泵车姿态展示与控制系统,包括:
24.3d模型,用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机;
25.泵车,用于接收移动指令并解析报文,执行指令动作,采集执行数据,并将执行数据发送至上位机;
26.上位机,用于发送所述移动指令至泵车,并且解析接收的执行数据,控制3d模型移动。
27.第三方面,本发明提供一种基于3d模型的泵车姿态展示与控制装置,应用于泵车,包括:
28.接收单元,用于接收上位机发送的移动指令并解析报文;
29.执行单元,用于执行指令动作,采集执行数据;
30.发送单元,用于发送执行数据至上位机;
31.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
32.第四方面,本发明提供一种基于3d模型的泵车姿态展示与控制装置,包括处理器及存储介质;
33.所述存储介质用于存储指令;
34.所述处理器用于根据所述指令进行操作以执行根据上述任一项所述方法的步骤。
35.第五方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述任一项所述方法的步骤。
36.与现有技术相比,本发明所达到的有益效果:
37.本发明通过引入3d模型之后,突破了远程遥控中仅能模拟驾驶员视角这一局限,增加了对车辆本身姿态的立体观察视角,方便驾驶员对车辆姿态的把握,同时,本发明具有对泵车姿态进行控制的功能,在一些难以通过操控台控制的复杂地形,可以利用操控3d模型的方式,控制泵车作业姿态,增加并优化了对工程机械车辆的控制方式,最后,基于3d模型的泵车姿态展示与控制方法具备良好的移植性,可以方便地应用到其他种类工程机械车辆的远程遥控系统中。
附图说明
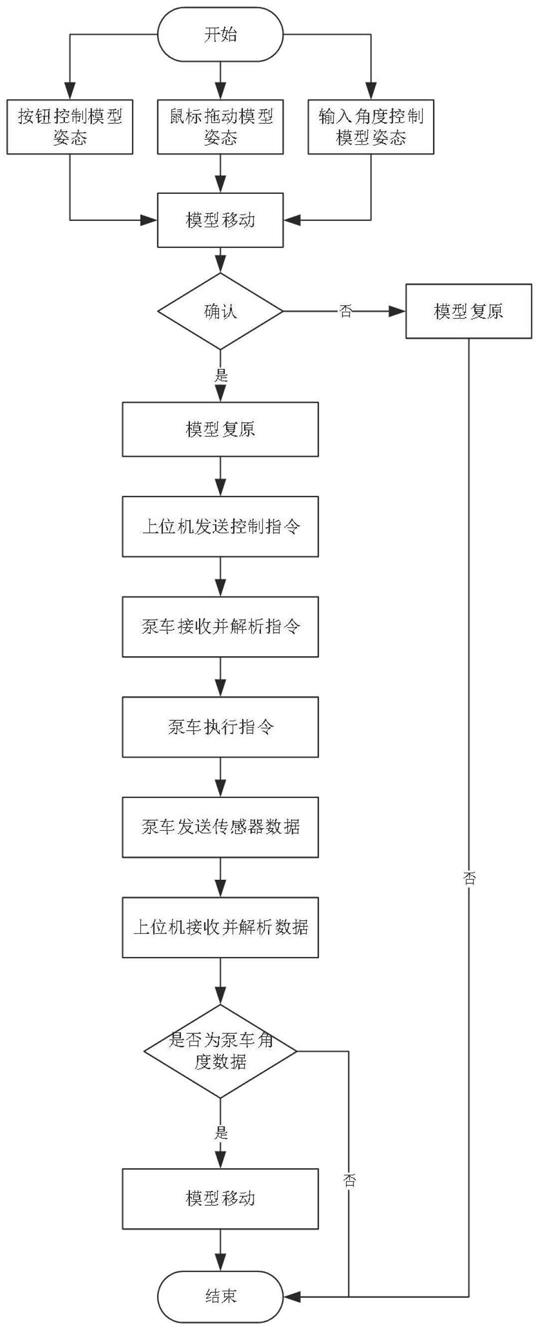
38.图1为本发明的基于3d模型的泵车姿态展示与控制方法的原理图。
具体实施方式
39.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
40.实施例1
41.本实施例介绍一种基于3d模型的泵车姿态展示与控制方法,应用于泵车,包括:
42.接收上位机发送的移动指令并解析报文;
43.执行指令动作,采集执行数据;
44.发送执行数据至上位机;
45.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
46.本实施例提供的基于3d模型的泵车姿态展示与控制方法,其应用过程具体涉及如下步骤:
47.步骤一、用户控制3d模型进行移动操作;
48.如果确认,模型复原,上位机发送该移动指令,并执行步骤二;
49.如果没有确认,模型复原;
50.步骤二、泵车收到控制指令并解析报文;
51.步骤三、泵车执行指令动作并将传感器采集的数据发送给上位机;
52.步骤四、上位机解析接收的传感器数据,并控制泵车模型移动。
53.优选的是,在步骤一中,用户可以通过三种方式实现对泵车模型的移动操作:
54.1)鼠标直接拖动3d模型中泵车臂或车身;
55.2)鼠标点击选中3d模型中泵车臂或车身,再点击控制区域按钮对选中的部位进行角度调整,模型跟随点击操作同步移动;
56.3)鼠标点击选中3d模型中泵车臂或车身,再在设置区域输入角度值,模型跟随角度变化同步移动;
57.操作完成后,点击确认,模型复原为泵车实际姿态,上位机向车辆端发送移动指令;
58.操作完成后,点击取消,模型复原为泵车实际姿态,上位机不执行任何操作。
59.优选的是,在步骤一中,模型复原的原因在于:
60.在用户控制3d模型进行移动操作时,模型为控制模式,跟随用户的操作进行移动用于对用户的操作进行反馈。其他时刻模型处于展示模式,跟随泵车发送来的角度数据进行移动用于实时表现实际泵车姿态。所以当用户结束对模型的控制时,模型及时复原到泵车实际的姿态。
61.优选的是,在步骤四中,上位机接收到的数据包括泵车的各项工况数据,各个角度数据等,提取角度数据并控制3d模型相应部分进行旋转操作。
62.以下结合附图,通过具体实施例对本发明作进一步的说明。
63.如图1所示,一种基于3d模型的泵车姿态展示与控制方法,用户通过三种方式中的任意一种控制模型移动,点击确认后,模型复原为泵车实际姿态,上位机向泵车发送控制指令。如果点击取消,模型复原为泵车实际姿态。
64.泵车接收到上位机发来的控制指令后,对指令进行解析,然后泵车执行相应指令动作。同时,泵车将各传感器数据发送给上位机。
65.上位机接收到泵车传来的数据,对数据进行解析,对将解析出的角度数据同步到3d模型,使其相应的部位旋转到泵车实际的角度。如果解析出的数据为非角度数据,则不执行任何操作。
66.实施例2
67.本实施例提供一种基于3d模型的泵车姿态展示与控制系统,包括:
68.3d模型,用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机;
69.泵车,用于接收移动指令并解析报文,执行指令动作,采集执行数据,并将执行数据发送至上位机;
70.上位机,用于发送所述移动指令至泵车,并且解析接收的执行数据,控制3d模型移动。
71.实施例3
72.本实施例提供一种基于3d模型的泵车姿态展示与控制装置,应用于泵车,包括:
73.接收单元,用于接收上位机发送的移动指令并解析报文;
74.执行单元,用于执行指令动作,采集执行数据;
75.发送单元,用于发送执行数据至上位机;
76.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
77.实施例4
78.本实施例提供一种基于3d模型的泵车姿态展示与控制装置,包括处理器及存储介质;
79.所述存储介质用于存储指令;
80.所述处理器用于根据所述指令进行操作以执行根据下述任一项所述方法的步骤:
81.接收上位机发送的移动指令并解析报文;
82.执行指令动作,采集执行数据;
83.发送执行数据至上位机;
84.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
85.实施例5
86.本实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现下述任一项所述方法的步骤:
87.接收上位机发送的移动指令并解析报文;
88.执行指令动作,采集执行数据;
89.发送执行数据至上位机;
90.其中,所述上位机用于接收3d模型发送的确认指令和移动指令,同时将移动指令
发送至泵车,并且在接收到执行数据后,控制3d模型移动;所述3d模型用于接收移动指令,判断是否接收到确认指令,如果接收到确认指令,发送所述确认指令和移动指令至上位机。
91.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1