一种飞行计划航段水平航迹预测方法与流程
1.本公开涉及机载飞行管理技术领域,尤其涉及一种飞行计划航段水平航迹预测方法。
背景技术:
2.通用飞机越来越普及,广泛用于农、林、牧、渔产业﹑旅游业等。直飞功能是一种飞行计划的执行方式,飞机在飞行过程中,由于危险天气、空管限制等因素,需要偏离当前激活航线,直接飞至某一目标航路点或者目标截断航段上。
3.现有飞行管理系统的航迹预测方法为:1)先通过计算转弯半径r和当前飞行航向;2)再基于转弯半径r和当前飞行航向,确定圆心o坐标;3)以o点为圆心、半径为转弯半径r,沿着航向方向作圆弧l;4)根据截断航线角φc确定所述圆弧l的切线斜率k,以切线斜率k作圆弧l的切线,切点即为转弯结束点p,切线与目标截断航段的交点为理论截断点q。这种方法是通过计算转弯圆心点o经纬度,再计算转弯点经纬度,因此必须计算转弯中心点坐标,导致过程复杂,效率低。
技术实现要素:
4.有鉴于此,本公开实施例提供一种飞行计划航段水平航迹预测方法,区别于传统的转弯点经纬度预测方法,不需要计算转弯中心点经纬度,而是将转弯点与航路转换到球面坐标系中,通过三点共面与距离信息联立方程,从而计算出转弯点经纬度,方法直接有效。当所有的航路转弯点计算出来后,平滑连接所有的水平航路对应转弯点,形成一条预测航路。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种飞行计划航段水平航迹预测方法,包括以下步骤:
7.步骤1:对地球建立椭球面坐标系:以地心为原点,建立o-xyz坐标系;
8.步骤2:在飞行航段上确定三个航路点p1、p2、p3,获取每个航路点纬度和经度坐标p1(n1,e1),p2(n2,e2),p3(n3,e3),确定起始转弯点s、终止转弯点e和转弯中心点o,计算转弯半径r,再计算转弯起始点s与p2航路点之间的距离d;
9.步骤3:将航路点p1、p2和起始转弯点s转换到球面o-xyz坐标系中,得到航路点p1、p2和起始转弯点s的球坐标,通过三点共面建立共面方程,结合距离计算公式求解得到起始转弯点s的经纬度;
10.步骤4:将起始转弯点s的经纬度带入共面方程,计算得到终止转弯点e的经纬度,将所有的转弯点平滑连接,得到水平航迹预测并输出。
11.进一步地,步骤2中,转弯半径r的计算方法为:
12.转弯半径r=(v
gs
)2/g
×
tanφ,
13.其中,φ为当前横滚角;v
gs
为预测地速,根据当前飞机飞行高度在飞机性能数据库中查取。
14.进一步地,步骤2中,转弯起始点s与p2航路点之间的距离d计算方法如下:
15.(1)将航路点p1,p2,p3经纬度转化为球面o-xyz坐标系表示;
16.(2)计算航路点p1到p2、p2到p3应飞磁航向角;
17.(3)计算航路点p1_p2_p3航路夹角;
18.(4)结合转弯半径r和航路夹角计算出距离d。
19.进一步地,步骤3中,求解起始转弯点s的经纬度时取航路点p1和p2之间的值。
20.本发明提出的一种飞行计划航段水平航迹预测方法,在通过确定转弯半径后,假设将转弯起始点、转弯终止点已知处理。通过建立椭球面坐标模型,并基于该模型进行航段和转弯起始点,终止点模型建立,通过转弯点与航路点共面和距离计算信息,反向计算出转弯起始点和转弯终止点的坐标。避免了传统方法通过计算转弯圆心点o,再计算转弯点情形,更加直接有效率。
21.其中,在计算转弯点经纬度的过程中,通过最新的基于模型的系统工具进行建模,验证由仿真结果可得,该方法能够有效的计算转弯点经纬度,通过已知的航路点经纬度信息,转弯半径最后将三个点切换到球面坐标中,通过球面坐标的视角通过共面成功计算出转弯点经纬度。
附图说明
22.为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
23.图1为本发明实施例中椭球面坐标系图;
24.图2为本发明实施例中地球表面任意一点p投影到椭球面坐标图;
25.图3为本发明实施例中水平航路点航段示意图;
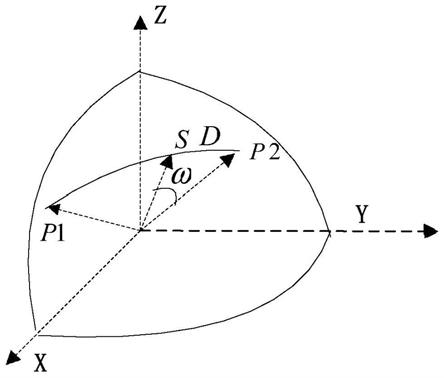
26.图4为本发明实施例中航路点预测转弯球面坐标系示意图;
27.图5为本发明实施例中平航迹预测平滑结果示意图;
28.图6为本发明实施例中水平航迹预测方法流程图。
具体实施方式
29.下面结合附图对本公开实施例进行详细描述。
30.以下通过特定的具体实例说明本公开的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本公开的其他优点与功效。显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。本公开还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本公开的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
31.要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面
可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
32.还需要说明的是,以下实施例中所提供的图示仅以示意方式说明本公开的基本构想,图式中仅显示与本公开中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
33.另外,在以下描述中,提供具体细节是为了便于透彻理解实例。然而,所属领域的技术人员将理解,可在没有这些特定细节的情况下实践所述方面。
34.本公开实施例的一种飞行计划航段水平航迹预测方法,如图6所示,具体实施方法如下:
35.(1)先对地球建立椭球面坐标系:以地心为原点,建立o-xyz坐标系。赤道为基本面,垂直于赤道基本面经过地心的一条轴称为z轴,指向北极为正。本初子午面与赤道面重合的轴称为x轴,向东为正。y轴与xz平面垂直构成右手定则,如图1所示。图2为地球表面任意一点p投影到椭球面坐标图。
36.(2)确定水平航路点航段p1(n1,e1),p2(n2,e2),p3(n3,e3)。n代表纬度,e代表经度。p1、p2、p3共同构成部分航路。如图3所示。起始转弯点s(ns,es)、终止转弯点e(ne,ee),转弯中心点o,转弯半径为r,起始转弯点s到p2航路点距离为d,如图3所示。北纬、东经为正;南纬西经为负;以示区分。
37.(3)将航路点p1、s、p2三个点转换到球面坐标系统中,如图4所示,再以球面坐标系视角进行分析。设三个航路点坐标p1(n1,e1),p2(n2,e2),p3(n3,e3),转弯中心点o,飞机起始转弯点为s,终止转弯点e。则p1,p2,s三点的球坐标为:
38.起始点p1:θ1=90-n1,或(西经)
39.航路点p2:θ2=90-n2,或(西经)
40.转弯点s:θ=90-ns,或(西经)
41.分别将p1、p2、s点投影到ox、oy、oz轴上;则:
[0042][0043][0044][0045]
其中r,r1,r2为经纬度s,p1,p2转换到地心坐标系的矢量形式。
[0046]
由于三矢量共面条件可得:
[0047]r·
r1
×
r2=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0048]
(4)滚转角计算:依据do-283a标准,设α为航迹改变角,单位为度。φ为滚转角,则滚转角和航迹改变角关系:
[0049]
φ=min(0.5*α,23)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0050]
(5)转弯半径r计算:
[0051]
转弯半径r:计算转弯半径r,转弯半径r=(v
gs
)2/g
×
tanφ,其中,φ为当前横滚角;v
gs
为预测地速,根据当前飞机飞行高度在现有飞机性能数据库中查取;
[0052]
(6)距离d计算:
[0053]
1)将航路点p1,p2,p3经纬度转化为球面o-xyz坐标系表示;
[0054]
2)计算p1到p2、p2到p3应飞磁航向角;
[0055]
3)再计算p1_p2_p3航路夹角;
[0056]
4)结合转弯半径和夹角信息计算出距离d。
[0057]
(7)又因:
[0058]
d=rω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0059]
其中,ω为p2_o_s弧度夹角,进一步公式(2)可得:
[0060]
cosω=cos(d/r)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0061]
又因:cosω=cos n2 cos ns cos(es-e2)+sin ns sin n2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0062]
由公式(2)和(6)联立可解出s点的经纬度。在这里需要注意的是,求解的s的经度应取p1、p2之间的值,在确定了es后,再带入公式(2)求解s点的纬度信息ns,tan ns>0,ns为北纬;tan ns<0,ns为南纬。计算转弯终止点e点同理。
[0063]
其余航路点情况类似,等计算出来所有航路点对应的转弯起始点、转弯终止点后,将这些点平滑连接如图5所示,共同构成一条水平航迹预测航路。
[0064]
本发明不同于传统方法必须计算转弯中心点坐标,本发明通过将问题化解到球面坐标系中,通过共面特点,矢量叉乘和距离信息联立,反向解算出航迹转弯点坐标,方法直接有效。当所有的航路转弯点计算出来后,平滑连接所有的水平航路对应转弯点,形成一条预测航路。
[0065]
以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1