双目立体图像视差图像获取方法、装置、设备及介质
1.本说明书涉及计算机技术领域,尤其涉及一种双目立体图像视差图像获取方法、装置、设备及介质。
背景技术:
2.双目立体视觉(binocular stereo vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,称作视差(disparity)图像。
3.现有技术中,双目立体图像的视差匹配时,会受到外界环境的干扰,特别在室外环境时,阳光等因素会干扰双目立体图像的视差匹配,进而使得最终生成的视差图像可能并不准确,而影响最终结果。
技术实现要素:
4.本说明书一个或多个实施例提供了一种双目立体图像视差图像获取方法、装置、设备及介质,用于解决如下技术问题:
5.双目立体图像的视差匹配时,会受到外界环境的干扰,特别在室外环境时,阳光等因素会干扰双目立体图像的视差匹配,进而使得最终生成的视差图像可能并不准确,而影响最终结果。
6.本说明书一个或多个实施例采用下述技术方案:
7.本说明书一个或多个实施例提供了一种双目立体图像视差图像获取方法,所述方法包括:
8.获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
9.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
10.根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
11.将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
12.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
13.根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
14.将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
15.进一步的,所述对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图,具体包括:
16.将所述双目立体图像输入特征提取网络;
17.通过所述特征提取网络,提取所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;其中,所述特征提取网络由残差模块和下采样层组成。
18.进一步的,所述对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征,具体包括:
19.将所述双目立体图像中的指定一侧图像输入上下文提取网络;
20.通过所述上下文提取网络,提取所述双目立体图像中的指定一侧图像的亲和力传播图和上下文特征。
21.进一步的,所述gru更新模块设置有多个;
22.所述将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像,具体包括:
23.将所述相关特征、所述上下文特征输入gru更新模块,并经过多个gru更新模块迭代计算得到双目立体视差图像。
24.进一步的,所述将所述相关特征、所述上下文特征输入gru更新模块,并经过多个gru更新模块迭代计算得到双目立体视差图像,具体包括:
25.将指定一侧图像的特征作为第一隐藏特征,并将所述第一隐藏特征、所述相关特征与所述上下文特征输入gru更新模块,输出更新的隐藏特征与视差变化量,将所述视差变化量与所述视差图进行相加,再利用亲和力传播图和激光雷达视差图对相加后的视差进行视差传播,得到迭代后的视差图,根据其余的gru更新模块进行迭代处理,得到双目立体视差图像。
26.进一步的,所述双目立体图像视差匹配模型的损失函数为稀疏视差损失函数、左右一致损失函数与平滑损失函数中的一种或多种。
27.进一步的,所述特征相关性图的分辨率为所述双目立体图像的1/4或1/8。
28.本说明书一个或多个实施例提供了一种双目立体图像视差图像获取装置,所述装置包括:
29.获取单元,用于获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
30.提取单元,用于对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
31.第一生成单元,用于根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
32.第二生成单元,用于将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
33.确定单元,用于对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
34.第三生成单元,用于根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
35.获取单元,用于将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
36.本说明书一个或多个实施例提供了一种双目立体图像视差图像获取设备,包括:
37.至少一个处理器;以及,
38.与所述至少一个处理器通信连接的存储器;其中,
39.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
40.获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
41.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
42.根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
43.将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
44.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
45.根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
46.将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
47.本说明书一个或多个实施例提供了一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
48.获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
49.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
50.根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
51.将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
52.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
53.根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
54.将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
55.本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
56.本说明书实施例同时获取待处理的双目立体图像和激光雷达点云,并对双目立体图像进行特征提取,以得左侧图像与右侧图像的特征相关性图,以便后续对通过特征相关性图生成相关性金字塔;同时,将激光雷达点云投影到双目立体图像中的指定一侧图像,以
生成相关联的激光雷达视差图像,后续对双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征,然后根据亲和力传播图与激光雷达视差图像生成视差图,并根据视差图在特征相关金字塔查找对应相关特征,最后将相关特征、上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像,通过上述方式得到的视差图像结合了激光雷达点云,可以减弱外界环境的干扰,使得双目立体图像视差图像更准确。
附图说明
57.为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。在附图中:
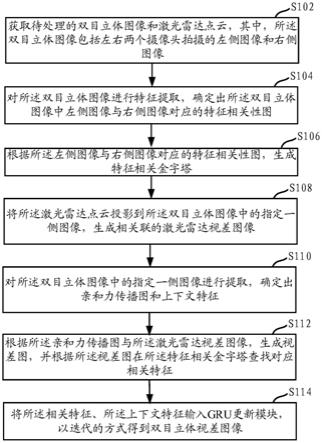
58.图1为本说明书一个或多个实施例提供的一种双目立体图像视差图像获取方法的流程示意图;
59.图2为本说明书一个或多个实施例提供的双目立体图像视差匹配模型的结构示意图;
60.图3为本说明书一个或多个实施例提供了一种双目立体图像视差图像获取装置的结构示意图;
61.图4为本说明书一个或多个实施例提供了一种双目立体图像视差图像获取设备的结构示意图。
具体实施方式
62.本说明书实施例提供一种双目立体图像视差图像获取方法、装置、设备及介质。
63.双目立体图像的视差匹配时,会受到外界环境的干扰,特别是在室外环境时,阳光等外界因素会干扰双目立体图像的视差匹配,进而使得最终生成的视差图像可能并不准确,而影响最终结果。
64.为了使本技术领域的人员更好地理解本说明书中的技术方案,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本说明书一部分实施例,而不是全部的实施例。基于本说明书实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本说明书保护的范围。
65.图1为本说明书一个或多个实施例提供的一种双目立体图像视差图像获取方法的流程示意图,该方法流程可以应用于双目立体图像视差匹配系统,该系统可以与双目立体图像视差的应用相结合,使该系统构建的双目立体图像视差匹配模型的可以更好的生成双目立体图像的视差图像。流程中的某些输入参数或者中间结果允许人工干预调节,以帮助提高准确性。
66.本说明书实施例的方法流程步骤如下:
67.s102,获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像。
68.在本说明书实施例中,激光雷达图像与双目立体图像是在同一场景同一时间和同
一角度拍摄。
69.由于现有的双目立体图像在获取数据时受到环境下限制,特别是在室外环境下,因此,大多数是在室内合成数据集来训练监督网络,这极大限制了网络的泛化能力。但激光雷达点云可以在尽可能的减少环境的影响。因此,利用双目立体图像和激光雷达点云进行自我监督训练是可以很好的解决上述问题的。
70.s104,对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图。
71.为了计算考虑,将特征相关性图的分辨率设定为原始双目立体图像的1/4或1/8,以此来提高计算速度。
72.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图,具体包括:
73.将所述双目立体图像输入特征提取网络;
74.通过所述特征提取网络,提取所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;其中,所述特征提取网络由残差模块和下采样层组成。
75.需要说明的是,为了提高效率,特征相关性图的计算可以用gpu矩阵相乘来实现。
76.s106,根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔。
77.s108,将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像。
78.s110,对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征。
79.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征,具体包括:
80.将所述双目立体图像中的指定一侧图像输入上下文提取网络;
81.通过所述上下文提取网络,提取所述双目立体图像中的指定一侧图像的亲和力传播图和上下文特征。
82.s112,根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征。
83.s114,将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
84.本说明书实施例的gru更新模块可以设置有多个。
85.所述将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像,具体包括:
86.将所述相关特征、所述上下文特征输入gru更新模块,并经过多个gru更新模块迭代计算得到双目立体视差图像。
87.将所述相关特征、所述上下文特征输入gru更新模块,并经过多个gru更新模块迭代计算得到双目立体视差图像,具体包括:
88.将指定一侧图像的特征作为第一隐藏特征,并将所述第一隐藏特征、所述相关特征与所述上下文特征输入gru更新模块,输出更新的隐藏特征与视差变化量,将所述视差变化量与所述视差图进行相加,再利用亲和力传播图和激光雷达视差图对相加后的视差进行
视差传播,得到迭代后的视差图,根据其余的gru更新模块进行迭代处理,得到双目立体视差图像。
89.相关性金字塔构建:类似于raft中构建4d correlation volume(相关体积),本说明书实施例在双目立体图像匹配中通过计算左右图像特征图的点积来构建3d correlation volume,通过池化层把3d correlation volume的最后一个维度下采样,实现包含不同尺度的相关性金字塔,在每个层级的correlation volume有不同的感受野,但仍保留原图分辨率的correlation volume,以完成相关性金字塔的构建。
90.本说明书实施例还可以定义查找算子,给定当前估计的视差,可以在correlation volume中反向寻找对应像素位置处的代价元素,在每个层级的correlation volume中构建1d的网格来限定查找范围,然后将不同层级的1d网格元素拼接形成一个单独的特征图。
91.双目立体图像视差匹配模型的损失函数为稀疏视差损失函数、左右一致损失函数或平滑损失函数。
92.其中,选用稀疏视差损失函数时,不仅可以帮助获得密集视差,还可以监督视差估计;选用左右一致损失函数时,是为了保证估计的左视差与右视差一致;仅适用外观和稀疏监督进行训练,可能会导致估计视差不平滑不准确,引用平滑损失函数时,可以缓解上述问题。
93.本说明书实施例可以通过合成数据集sceneflow训练双目立体图像视差匹配模型,sceneflow是一个合成图像数据集,包括多张双目立体图像。
94.本说明书实施例可以是基于光流估计网络raft来解决双目立体匹配问题,基本思想仍然是raft的构建correlation volume、多层级的卷积gru迭代优化过程,可以很好的在图像上传播全局信息。
95.gru(gate recurrent unit)是循环神经网络(recurrent neural network,rnn)的一种。和lstm(long-short term memory)一样,也是为了解决长期记忆和反向传播中的梯度等问题而提出来的。
96.图2为本说明书实施例提供的双目立体图像视差匹配模型的结构示意图,左侧为待处理的双目立体图像的右图和左图,以及激光雷达视差图,待处理的双目立体图像经过特征提取网络后,经过特征关联模块(c,correlation)生成特征相关金字塔。双目立体图像的左图经过上下文提取网络后,生成亲和力传播图和上下文特征。将激光雷达视差图d
l
作为初始视差,并结合亲和力传播图对初始视差进行传播(p,propagation),得到第一次迭代前的视差图d0,其中,传播时通过视差传播模块。接下来gru更新模块将对视差图d进行迭代式地更新,在第t次迭代中,将执行以下步骤:在特征相关金字塔中d
t-1
的视差位置查找(l,lookup)对应相关特征,其中,查找时通过关联特征查询模块,输入至gru,同时输入gru的还有上下文提取输出的上下文特征和上一次gru迭代的隐藏特征,(gru在第一次迭代时,将特征提取网络输出的特征作为隐藏特征),gru输出更新的隐藏特征,并输出需要更新的视差变化量δ,将输出的视差变化量δ与前一次迭代的视差图d
t-1
进行相加(+,addition),再利用亲和力传播图和激光雷达视差图d
l
对相加后的视差进行视差传播(p,propagation),即得到本次迭代后的视差图d
t
。其中,在视差传播(p,propagation)也是迭代式的进行的:一次迭代分为两步,首先利用亲和力传播图对视差图进行传播一次,再将有效激光雷达数据位置的视差更新为激光雷达视差;经过m次传播后,即可得到视差图传播的结果。在对视差
图进行n次gru迭代更新后,对输出视差进行上采样(u,upsampling),将低分辨率图像上采样到原始图像分辨率,即为最右侧的图像,其中,上采样时通过上采样模块。
97.本说明书实施例同时获取待处理的双目立体图像和激光雷达点云,并对双目立体图像进行特征提取,以得左侧图像与右侧图像的特征相关性图,以便后续对通过特征相关性图生成相关性金字塔;同时,将激光雷达点云投影到双目立体图像中的指定一侧图像,以生成相关联的激光雷达视差图像,后续对双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征,然后根据亲和力传播图与激光雷达视差图像生成视差图,并根据视差图在特征相关金字塔查找对应相关特征,最后将相关特征、上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像,通过上述方式得到的视差图像结合了激光雷达点云,可以减弱外界环境的干扰,使得双目立体图像视差图像更准确。
98.图3为本说明书一个或多个实施例提供了一种双目立体图像视差图像获取装置的结构示意图,装置包括:获取单元302、提取单元304、第一生成单元306、第二生成单元308、确定单元310、第三生成单元312与获取单元314。
99.获取单元302用于获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
100.提取单元304用于对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
101.第一生成单元306用于根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
102.第二生成单元308用于将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
103.确定单元310用于对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
104.第三生成单元312用于根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
105.获取单元314用于将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
106.图4为本说明书一个或多个实施例提供了一种双目立体图像视差图像获取设备的结构示意图,包括:
107.至少一个处理器;以及,
108.与所述至少一个处理器通信连接的存储器;其中,
109.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
110.获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
111.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
112.根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
113.将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的
激光雷达视差图像;
114.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
115.根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
116.将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
117.本说明书一个或多个实施例提供了一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
118.获取待处理的双目立体图像和激光雷达点云,其中,所述双目立体图像包括左右两个摄像头拍摄的左侧图像和右侧图像;
119.对所述双目立体图像进行特征提取,确定出所述双目立体图像中左侧图像与右侧图像对应的特征相关性图;
120.根据所述左侧图像与右侧图像对应的特征相关性图,生成特征相关金字塔;
121.将所述激光雷达点云投影到所述双目立体图像中的指定一侧图像,生成相关联的激光雷达视差图像;
122.对所述双目立体图像中的指定一侧图像进行提取,确定出亲和力传播图和上下文特征;
123.根据所述亲和力传播图与所述激光雷达视差图像,生成视差图,并根据所述视差图在所述特征相关金字塔查找对应相关特征;
124.将所述相关特征、所述上下文特征输入gru更新模块,以迭代的方式得到双目立体视差图像。
125.在20世纪90年代,对于一个技术的改进可以很明显地区分是硬件上的改进(例如,对二极管、晶体管、开关等电路结构的改进)还是软件上的改进(对于方法流程的改进)。然而,随着技术的发展,当今的很多方法流程的改进已经可以视为硬件电路结构的直接改进。设计人员几乎都通过将改进的方法流程编程到硬件电路中来得到相应的硬件电路结构。因此,不能说一个方法流程的改进就不能用硬件实体模块来实现。例如,可编程逻辑器件(programmable logic device,pld)(例如现场可编程门阵列(field programmable gate array,fpga))就是这样一种集成电路,其逻辑功能由用户对器件编程来确定。由设计人员自行编程来把一个数字系统“集成”在一片pld上,而不需要请芯片制造厂商来设计和制作专用的集成电路芯片。而且,如今,取代手工地制作集成电路芯片,这种编程也多半改用“逻辑编译器(logic compiler)”软件来实现,它与程序开发撰写时所用的软件编译器相类似,而要编译之前的原始代码也得用特定的编程语言来撰写,此称之为硬件描述语言(hardware description language,hdl),而hdl也并非仅有一种,而是有许多种,如abel(advanced boolean expression language)、ahdl(altera hardware description language)、confluence、cupl(cornell university programming language)、hdcal、jhdl(java hardware description language)、lava、lola、myhdl、palasm、rhdl(ruby hardware description language)等,目前最普遍使用的是vhdl(very-high-speed integrated circuit hardware description language)与verilog。本领域技术人员也应
该清楚,只需要将方法流程用上述几种硬件描述语言稍作逻辑编程并编程到集成电路中,就可以很容易得到实现该逻辑方法流程的硬件电路。
126.控制器可以按任何适当的方式实现,例如,控制器可以采取例如微处理器或处理器以及存储可由该(微)处理器执行的计算机可读程序代码(例如软件或固件)的计算机可读介质、逻辑门、开关、专用集成电路(application specific integrated circuit,asic)、可编程逻辑控制器和嵌入微控制器的形式,控制器的例子包括但不限于以下微控制器:arc 625d、atmel at91sam、microchip pic18f26k20以及silicone labs c8051f320,存储器控制器还可以被实现为存储器的控制逻辑的一部分。本领域技术人员也知道,除了以纯计算机可读程序代码方式实现控制器以外,完全可以通过将方法步骤进行逻辑编程来使得控制器以逻辑门、开关、专用集成电路、可编程逻辑控制器和嵌入微控制器等的形式来实现相同功能。因此这种控制器可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置也可以视为硬件部件内的结构。或者甚至,可以将用于实现各种功能的装置视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
127.上述实施例阐明的系统、装置、模块或单元,具体可以由计算机芯片或实体实现,或者由具有某种功能的产品来实现。一种典型的实现设备为计算机。具体的,计算机例如可以为个人计算机、膝上型计算机、蜂窝电话、相机电话、智能电话、个人数字助理、媒体播放器、导航设备、电子邮件设备、游戏控制台、平板计算机、可穿戴设备或者这些设备中的任何设备的组合。
128.为了描述的方便,描述以上装置时以功能分为各种单元分别描述。当然,在实施本说明书时可以把各单元的功能在同一个或多个软件和/或硬件中实现。
129.本领域内的技术人员应明白,本说明书实施例可提供为方法、系统、或计算机程序产品。因此,本说明书实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本说明书实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
130.本说明书是参照根据本说明书实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
131.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
132.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一
个方框或多个方框中指定的功能的步骤。
133.在一个典型的配置中,计算设备包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
134.内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)。内存是计算机可读介质的示例。
135.计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
136.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
137.本说明书可以在由计算机执行的计算机可执行指令的一般上下文中描述,例如程序模块。一般地,程序模块包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、组件、数据结构等等。也可以在分布式计算环境中实践本说明书,在这些分布式计算环境中,由通过通信网络而被连接的远程处理设备来执行任务。在分布式计算环境中,程序模块可以位于包括存储设备在内的本地和远程计算机存储介质中。
138.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于装置、设备、非易失性计算机存储介质实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
139.上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
140.以上所述仅为本说明书的一个或多个实施例而已,并不用于限制本说明书。对于本领域技术人员来说,本说明书的一个或多个实施例可以有各种更改和变化。凡在本说明书的一个或多个实施例的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本说明书的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1