学习用数据生成装置、学习装置、控制装置、学习用数据生成方法、学习方法、控制方法、学习用数据生成程序、学习程序以及控制程序与流程
1.本公开的技术涉及学习用数据生成装置、学习装置、控制装置、学习用数据生成方法、学习方法、控制方法、学习用数据生成程序、学习程序以及控制程序。
背景技术:
2.以往,已知有能够使用车间的启动数据来实现车间的辨识以及控制参数的调整的车间控制系统(例如,参照专利文献1:日本特开2010-113638号公报)。
3.日本特开2010-113638号公报所公开的系统辅助工具基于启动数据使用辨识功能来估计车间的模型参数。然后,系统辅助工具使用控制参数调整功能,使用辨识结果的模型参数来计算模型预测控制部及pid控制部所涉及的控制参数。
技术实现要素:
4.发明所要解决的课题
5.另外,在任意的控制系统中,有时将从控制对象观测的观测数据设定为学习用数据,对在该控制系统中动作的模型执行学习。作为这样的模型的一例,在对作为表示决策树的模型的决策树模型执行学习的情况下,学习用数据的数量越增加,决策树模型的层数越增加,运算时间、模型的存储器容量越增加。
6.但是,在组装于控制系统的设备中需要减少运算时间。关于这一点,在使用从控制对象观测到的庞大的观测数据来对决策树模型执行学习的情况下,决策树模型的运算时间以及模型的存储器容量增加,因此不优选使用庞大的学习用数据。
7.因此,从庞大的观测数据中选择少数的观测数据作为学习用数据的情况较多。然而,在这种情况下,当选择的观测数据作为学习用数据而言不适当时,使用该学习用数据执行学习后的决策树模型也成为不适当的模型。具体而言,在被选择为学习用数据的观测数据中包含噪声的情况下,使用该学习用数据执行学习后的决策树模型的精度变低。但是,难以从庞大的观测数据中取舍选择不使决策树模型的精度降低的学习用数据。
8.在上述日本特开2010-113638号公报所记载的技术中,采集车间的启动数据,基于该启动数据来估计模型参数,但没有考虑对该启动数据进行取舍选择。因此,在使用上述日本特开2010-113638号公报所记载的技术来降低决策树模型的运算时间和模型的存储器容量的情况下,需要通过人工对启动数据进行取舍选择,存在难以容易地削减学习用数据的课题。
9.本公开的技术是鉴于上述问题而完成的,其目的在于使学习用数据的削减变得容易。
10.用于解决课题的手段
11.为了达成上述目的,本公开的技术的学习用数据生成装置包括:取得部,其取得从
控制对象观测到的、表示解释变量和目标变量的组合的多个观测数据;教师用学习部,其基于由所述取得部取得的所述多个观测数据,对用于根据所述解释变量输出所述目标变量的模型执行学习,生成学习完毕的教师用模型;以及学习用数据生成部,其通过对由所述教师用学习部生成的所述教师用模型输入规定的解释变量,取得针对所述规定的解释变量的规定的目标变量,生成所述规定的解释变量和所述规定的目标变量的组合作为用于对决策树模型执行学习的学习用数据。
12.另外,所述控制对象也可以是制造装置。
13.另外,本公开的技术的学习装置包括:学习用数据取得部,其取得由所述学习用数据生成装置生成的所述学习用数据;以及学习部,其基于由所述学习用数据取得部取得的所述学习用数据对所述决策树模型执行学习。
14.另外,本公开的技术的控制装置包括:信息取得部,其从所述控制对象取得所述解释变量;以及控制部,其通过向由所述学习装置执行学习后的所述决策树模型输入由所述信息取得部取得到的所述解释变量,取得与该解释变量对应的目标变量,对所述控制对象执行与该目标变量相应的控制。
15.另外,本公开的技术的学习用数据生成方法是如下的学习用数据生成方法:取得部取得从控制对象观测到的、表示解释变量与目标变量的组合的多个观测数据,教师用学习部基于由所述取得部取得的所述多个观测数据,对用于根据所述解释变量输出所述目标变量的模型执行学习,生成学习完毕的教师用模型,学习用数据生成部通过对由所述教师用学习部生成的所述教师用模型输入规定的解释变量,取得针对所述规定的解释变量的规定的目标变量,生成所述规定的解释变量和所述规定的目标变量的组合作为用于对决策树模型执行学习的学习用数据。
16.另外,本公开的技术的学习方法是如下的学习方法:学习用数据取得部取得通过上述的学习用数据生成方法生成的所述学习用数据,学习部基于由所述学习用数据取得部取得的所述学习用数据,对所述决策树模型执行学习。
17.另外,本公开的技术的控制方法是如下控制方法:信息取得部从所述控制对象取得所述解释变量,控制部通过向通过上述学习方法执行学习后的所述决策树模型输入通过所述信息取得部取得到的所述解释变量,取得与该解释变量对应的目标变量,对所述控制对象执行与该目标变量相应的控制。
18.另外,本公开的技术的学习用数据生成程序是用于使计算机作为以下部分发挥功能的学习用数据生成程序:取得部,其取得从控制对象观测到的、表示解释变量和目标变量的组合的多个观测数据;教师用学习部,其基于由所述取得部取得的所述多个观测数据,对用于根据所述解释变量输出所述目标变量的模型执行学习,生成学习完毕的教师用模型;以及学习用数据生成部,其通过对由所述教师用学习部生成的所述教师用模型输入规定的解释变量,取得针对所述规定的解释变量的规定的目标变量,生成所述规定的解释变量和所述规定的目标变量的组合作为用于对决策树模型执行学习的学习用数据。
19.另外,本公开的技术的学习程序是用于使计算机作为学习用数据取得部和学习部发挥功能的学习程序,所述学习用数据取得部取得利用上述学习用数据生成程序生成的所述学习用数据,所述学习部基于由所述学习用数据取得部取得的所述学习用数据对所述决策树模型执行学习。
20.另外,本公开的技术的控制程序是用于使计算机作为如下部分发挥功能的控制程序:信息取得部,其从所述控制对象取得所述解释变量;以及控制部,其通过向利用上述学习程序执行学习后的所述决策树模型输入由所述信息取得部取得到的所述解释变量,取得与该解释变量对应的目标变量,对所述控制对象执行与该目标变量相应的控制。
21.发明效果
22.根据本公开的技术的学习用数据生成装置、学习装置、控制装置、方法以及程序,能够容易地削减学习用数据。
附图说明
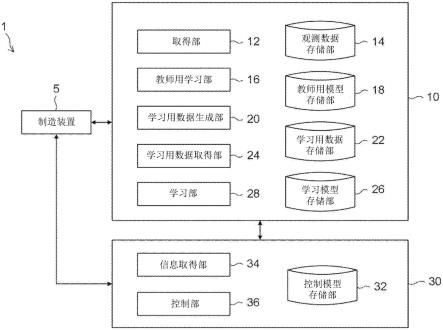
23.图1是表示本实施方式的控制系统的功能结构的框图。
24.图2是表示本实施方式的学习装置的硬件结构的框图。
25.图3是表示本实施方式的plc的硬件结构的框图。
26.图4是概念性地表示决策树模型的图。
27.图5是用于说明决策树模型的学习的图。
28.图6是用于说明从观测数据中选择几个数据的情况的图。
29.图7是用于说明学习用数据的生成的图。
30.图8是表示本实施方式中的学习用数据生成处理的流程的流程图。
31.图9是表示本实施方式中的学习处理的流程的流程图。
32.图10是表示本实施方式中的控制处理的流程的流程图。
33.图11是用于说明本实施方式的变形例的图。
34.图12是用于说明本实施方式的变形例的图。
具体实施方式
35.以下,参照附图对本公开的技术的实施方式的一例进行说明。在本实施方式中,以搭载有本公开的技术的控制装置的plc(programmable logic controller)为例进行说明。另外,在各附图中,对相同或等效的构成要素及部分标注相同的参照标号。另外,为了便于说明,附图的尺寸及比率被夸张表示,有时与实际的比率不同。
36.如图1所示,本实施方式的控制系统1具备制造装置5、学习装置10以及plc 30。本实施方式的plc 30使用由学习装置10生成的学习完毕的决策树模型,对作为控制对象的制造装置5的动作进行控制。制造装置5例如是输送装置、压力机等。作为控制对象的制造装置5可以是1个,也可以是多个。
37.图2是示出根据本实施方式的学习装置10的硬件结构的框图。如图2所示,学习装置10具有cpu(central processing unit)42、存储器44、存储装置46、输入输出i/f(interface)48、存储介质读取装置50以及通信i/f 52。各结构经由总线54以能够相互通信的方式连接。
38.在存储装置46中保存有用于执行后述的各处理的学习用数据生成程序以及学习程序。cpu 42是中央运算处理单元,执行各种程序或控制各结构。即,cpu 42从存储装置46读出程序,将存储器44作为作业区域来执行程序。cpu 42按照存储于存储装置46的程序,进行上述各结构的控制以及各种运算处理。
39.存储器44由ram(random access memory)构成,作为作业区域暂时存储程序和数据。存储装置46由rom(read only memory)、hdd(hard disk drive)、ssd(solid state drive)等构成,保存包含操作系统在内的各种程序以及各种数据。
40.输入输出i/f 48是进行来自制造装置5的数据的输入、以及向制造装置5的数据的输出的接口。另外,例如也可以连接键盘、鼠标等用于进行各种输入的输入装置、以及例如显示器、打印机等用于输出各种信息的输出装置。作为输出装置,也可以通过采用触摸面板显示器而作为输入装置发挥功能。
41.存储介质读取装置50进行cd(compact disc)-rom、dvd(digital versatile disc)-rom、蓝光光盘、usb(universal serial bus)存储器等各种存储介质中存储的数据的读入、对存储介质的数据的写入等。
42.通信i/f 52是用于与其他设备进行通信的接口,例如使用以太网(注册商标)、fddi、wi-fi(注册商标)等标准。
43.图3是表示本实施方式的plc 30的硬件结构的框图。如图3所示,plc 30具有cpu 62、存储器64、存储装置66、输入输出i/f 68、存储介质读取装置70以及通信i/f 72。各结构经由总线74以能够相互通信的方式连接。
44.在存储装置66中保存有用于执行后述的控制处理的控制程序。cpu 62是中央运算处理单元,执行各种程序或控制各结构。即,cpu 62从存储装置66读出程序,将存储器64作为作业区域来执行程序。cpu 62按照存储于存储装置66的程序,进行上述各结构的控制以及各种运算处理。
45.存储器64由ram构成,作为作业区域暂时存储程序以及数据。存储装置66由rom以及hdd、ssd等构成,保存包含操作系统在内的各种程序以及各种数据。
46.输入输出i/f 68是进行来自制造装置5的数据的输入、以及向制造装置5的数据的输出的接口。另外,例如也可以连接键盘、鼠标等用于进行各种输入的输入装置、以及例如显示器、打印机等用于输出各种信息的输出装置。作为输出装置,也可以通过采用触摸面板显示器而作为输入装置发挥功能。
47.存储介质读取装置70进行cd-rom、dvd-rom、蓝光光盘、usb存储器等各种存储介质中存储的数据的读入、对存储介质的数据的写入等。
48.通信i/f 72是用于与其他设备进行通信的接口,例如使用以太网(注册商标)、fddi、wi-fi(注册商标)等标准。
49.接下来,说明学习装置10的功能结构。如图1所示,学习装置10在功能上包括取得部12、教师用学习部16、学习用数据生成部20、学习用数据取得部24以及学习部28。另外,在学习装置10的规定的存储区域设置有观测数据存储部14、教师用模型存储部18、学习用数据存储部22、学习模型存储部26。各功能结构通过cpu 42读出存储于存储装置46的各程序并在存储器44中展开并执行来实现。
50.取得部12取得多个从作为控制对象的制造装置5观测到的观测数据。然后,取得部12将取得的多个观测数据保存到观测数据存储部14。本实施方式的观测数据是表示解释变量和目标变量的组合的数据。
51.观测数据中的解释变量例如是制造装置5内的马达的转速、由设置于制造装置5的各种传感器检测出的传感器值、基于这些值进行了判定处理等的处理结果等的信息。观测
数据中的目标变量是针对所输入的解释变量推断的制造装置5的状态等的预测值。
52.后述的本实施方式的决策树模型基于观测数据中的解释变量,输出制造装置5的控制所需的预测值即目标变量。即,本实施方式的决策树模型基于解释变量推断制造装置5的控制所需的预测值。然后,后述的plc 30生成与通过决策树模型估计出的目标变量相应的控制信号。plc 30对制造装置5执行与根据目标变量生成的控制信号相应的控制。
53.在观测数据存储部14中保存由取得部12取得的多个观测数据。
54.在此,图4表示本实施方式的决策树模型的概念图。如图4所示,当根据学习用数据ld进行学习时,生成学习完毕的决策树模型m。若对该学习完毕的决策树模型m输入某解释变量,则得到与解释变量对应的目标变量。图4所示的学习完毕的决策树模型m是学习用数据ld的数量为10个、层的深度深的模型。图4所示的学习完毕的决策树模型m由于学习用数据的数量多,因此例如与学习用数据的数量为3个的决策树模型相比运算时间长。
55.在本实施方式的plc 30那样的嵌入式设备中,存在运算时间受到限制的情况。此外,在嵌入式设备中,还存在关于存储器尺寸的限制。因此,能够用于学习的学习用数据的数量的上限是预先确定的,优选以尽可能少的学习用数据生成决策树模型。因此,在本实施方式中,使用少数的学习用数据来生成决策树模型。以下,具体地进行说明。
56.图5表示用于说明决策树模型的学习的图。图5所示的图的横轴的输入表示解释变量。另外,图5所示的图的纵轴的输出表示目标变量。如图5的2-1所示,在存在作为解释变量和目标变量的对的观测数据d的情况下,根据这些观测数据d,通过已有的学习算法,生成作为2-2那样的回归树的决策树模型m。
57.但是,图5所示的决策树模型m在其生成时使用的观测数据的数量多,因此运算时间长。因此,例如,考虑从多个观测数据中选择几个数据,使用所选择的观测数据作为学习用数据对决策树模型执行学习。
58.图6表示用于说明从观测数据中选择几个数据的情况的图。如图6的3-1所示,考虑得到多个观测数据d的情况。在该情况下,设如图6的3-2所示,例如通过人工从多个观测数据d中选择了5个数据ds。但是,如图6的3-3所示,在这些数据ds中包含噪声的情况下,基于数据ds执行学习后的决策树模型m’的精度变低,无法成为适当的模型。
59.因此,在本实施方式中,使用多个观测数据,暂时生成表示教师用的决策树模型的教师用模型,使用该教师用模型生成用于对其他决策树模型执行学习的学习用数据。
60.图7表示用于说明本实施方式中的学习用数据的生成的图。如图7的4-1所示,基于多个观测数据d,通过已有的学习算法生成教师用模型m。接着,决定学习用数据的数量。例如,在图7的例子中,决定生成3个学习用数据。
61.然后,在图7的4-2中,设定生成学习用数据时的解释变量的范围r。具体而言,如图7的4-2所示,设定多个观测数据d中的解释变量的上限和解释变量的下限,将其范围设定为r。
62.接着,在图7的4-3中,设定对教师用模型m输入的3个解释变量x1、x2、x3。这3个解释变量x1、x2、x3是存在于作为解释变量的上限和解释变量的下限而设定的范围r内的解释变量。另外,在图7的例子中,以等间隔设定3个解释变量x1、x2、x3。
63.接着,在图7的4-4中,对教师用模型m输入3个解释变量x1、x2、x3,从教师用模型m输出目标变量y1、y2、y3。这3个数据p1、p2、p3被设定为学习用数据。
64.然后,如图7的4-5所示,基于学习用数据p1、p2、p3,生成与教师用模型m不同的其他决策树模型m’。该决策树模型m’是根据3个学习用数据p1、p2、p3生成的模型,因此成为运算时间短的模型。进而,决策树模型m’是基于从教师用模型m生成的学习用数据进行学习的,因此成为精度良好的模型。
65.因此,教师用学习部16基于由取得部12取得的多个观测数据,对用于根据解释变量输出目标变量的模型执行学习,生成学习完毕的教师用模型。另外,在本实施方式中,以使用决策树模型作为教师用模型的情况为例进行说明。决策树模型可以是分类树和回归树中的任意种。
66.在教师用模型存储部18中存储由教师用学习部16生成的学习完毕的教师用模型。
67.学习用数据生成部20通过对由教师用学习部16生成的学习完毕的教师用模型输入规定的解释变量x,取得针对规定的解释变量x的规定的目标变量y。然后,学习用数据生成部20生成规定的解释变量x和规定的目标变量y的组合,作为用于对其他决策树模型执行学习的学习用数据。
68.具体而言,首先,学习用数据生成部20如上述图7所示,设定多个观测数据中的解释变量的上限和解释变量的下限。接着,学习用数据生成部20如上述图7所示,将存在于解释变量的上限与解释变量的下限之间的范围内的解释变量设定为规定的解释变量。
69.然后,学习用数据生成部20如上述图7所示,将所设定的规定的解释变量输入到保存于教师用模型存储部18的教师用模型。由此,从教师用模型输出与规定的解释变量对应的规定的目标变量。学习用数据生成部20将规定的解释变量x和规定的目标变量y的组合作为用于对与教师用模型不同的其他决策树模型执行学习的学习用数据,保存在学习用数据存储部22中。
70.在学习用数据存储部22中存储有由学习用数据生成部20生成的多个学习用数据。
71.学习用数据取得部24在对与教师用模型不同的其他决策树模型执行学习时,取得保存在学习用数据存储部22中的学习用数据。
72.学习部28基于由学习用数据取得部24取得的学习用数据对与教师用模型不同的其他的决策树模型执行学习。另外,由于学习用数据的数量比观测数据的数量少,所以作为执行学习的对象的其他决策树模型的层的深度比教师用模型的层的深度小。
73.学习模型存储部26保存由学习部28执行学习后的学习完毕决策树模型。
74.接着,对本实施方式的plc 10的功能构成进行说明。
75.如上述图1所示,plc 10包括信息取得部34及控制部36作为功能结构。另外,在plc 10的规定的存储区域中设置有控制模型存储部32。各功能结构通过cpu 62读出存储于存储装置66的控制程序并在存储器64中展开并执行来实现。
76.在控制模型存储部32中保存由学习装置10执行学习后的学习完毕的决策树模型。
77.信息取得部34取得从制造装置5输出的解释变量。
78.控制部36通过向保存在控制模型存储部32中的学习完毕的决策树模型输入由信息取得部34取得的解释变量,取得与该解释变量对应的目标变量。然后,控制部36对制造装置5执行与所取得的目标变量相应的控制。
79.具体而言,控制部36基于从学习完毕的决策树模型输出的目标变量,生成并输出用于对制造装置5进行控制的控制信号。例如,控制部36根据用决策树模型预测的表示制造
装置5的状态的目标变量,生成用于调整辊的角度或变更马达的旋转速度的控制信号。然后,控制部36对制造装置5执行与控制信号相应的控制。
80.接着,对本实施方式的控制系统1的作用进行说明。
81.首先,对在学习装置10中执行的生成学习用数据的处理进行说明。在制造装置5进行驱动时,学习装置10的取得部12依次取得从制造装置5输出的观测数据,保存到观测数据存储部14。
82.并且,当学习装置10受理了生成学习用数据的指示信号时,学习装置10的cpu42从存储装置46读出学习用数据生成程序,在存储器44中展开并执行。由此,cpu42作为学习装置10的各功能结构发挥功能,执行图8所示的学习用数据生成处理。
83.在步骤s100中,取得部12取得在观测数据存储部14中保存的多个观测数据。
84.在步骤s102中,教师用学习部16基于在上述步骤s100中取得的多个观测数据,对用于根据解释变量输出目标变量的决策树模型执行学习,生成学习完毕的教师用模型。
85.在步骤s104中,教师用学习部16进行在上述步骤s102中生成的学习完毕的教师用模型的精度评价。例如,教师用学习部16使用在上述步骤s100中取得的多个观测数据,计算学习完毕的教师用模型的正解率。
86.在步骤s106中,教师用学习部16判定在上述步骤s104中得到的精度评价结果是否满足规定的条件。例如,在上述步骤s104中得到的正解率为规定的阈值以上的情况下,认为教师用模型的精度满足规定的条件,转移到步骤s108。另一方面,在上述步骤s104中得到的正解率小于规定的阈值的情况下,认为教师用模型的精度不满足规定的条件,转移到步骤s102,重复进行学习。
87.在步骤s108中,教师用学习部16将在上述步骤s102中得到的学习完毕的教师用模型保存在教师用模型存储部18中。
88.在步骤s110中,学习用数据生成部20通过对在上述步骤s108中保存在教师用模型存储部18中的学习完毕的教师用模型输入规定的解释变量x,取得针对规定的解释变量x的规定的目标变量y。然后,学习用数据生成部20生成规定的解释变量x和规定的目标变量y的组合,作为用于对其他决策树模型执行学习的学习用数据。另外,学习用数据生成部20生成多个学习用数据。
89.在步骤s112中,学习用数据生成部20将在步骤s110中生成的多个学习用数据保存在学习用数据存储部22中,结束学习用数据生成处理。
90.接着,对在学习装置10中执行的学习处理进行说明。
91.在学习用数据存储部22中保存了多个学习用数据之后,当学习装置10受理了生成决策树模型的指示信号时,学习装置10的cpu 42从存储装置46读出学习程序,在存储器44中展开并执行。由此,cpu 42作为学习装置10的各功能结构发挥功能,执行图9所示的学习处理。
92.在步骤s200中,学习用数据取得部24取得保存在学习用数据存储部22中的多个学习用数据。
93.在步骤s202中,学习部28基于在步骤s200中取得的学习用数据对与上述教师用模型不同的其他决策树模型执行学习。另外,作为执行学习的对象的其他决策树模型的层的深度比上述教师用模型的层的深度小。
94.在步骤s204中,学习部28进行在上述步骤s202中生成的学习完毕的决策树模型的精度评价。例如,教师用学习部16使用存储在观测数据存储部14中的多个观测数据来计算学习完毕的决策树模型的正解率。
95.在步骤s206中,学习部28判定在上述步骤s204中得到的精度评价结果是否满足规定的条件。例如,在上述步骤s204中得到的正解率为规定的阈值以上的情况下,认为决策树模型的精度满足规定的条件,转移到步骤s208。另一方面,在上述步骤s204中得到的正解率小于规定的阈值的情况下,认为决策树模型的精度不满足规定的条件,转移到步骤s202,重复进行学习。
96.在步骤s208中,学习部28将在步骤s202中生成的学习完毕的决策树模型保存在学习模型存储部26中,结束学习处理。
97.接着,对在plc 30中执行的控制处理进行说明。
98.在学习模型存储部26中保存了学习完毕的决策树模型之后,向plc 30输入该学习完毕的决策树模型。plc 30将学习完毕的决策树模型保存到控制模型存储部32。
99.然后,当plc 30受理了制造装置5的控制开始的指示信号时,plc 30的cpu 62从存储装置66读出控制程序,在存储器64中展开并执行。由此,cpu 62作为plc 30的各功能结构发挥功能,执行图10所示的控制处理。
100.在步骤s300中,信息取得部34取得从制造装置5输出的马达的转速等解释变量。
101.在步骤s302中,控制部36通过向保存在控制模型存储部32中的学习完毕的决策树模型输入在上述步骤s300中取得的解释变量,取得与该解释变量对应的目标变量。
102.在步骤s304中,控制部36对制造装置5执行与所取得的目标变量相应的控制。具体而言,控制部36基于从学习完毕的决策树模型输出的目标变量,生成并输出用于对制造装置5进行控制的控制信号。由此,执行使用了决策树模型的控制处理。
103.如以上说明的那样,本实施方式的控制系统的学习装置取得从控制对象观测到的、表示解释变量与目标变量的组合的多个观测数据。然后,学习装置基于所取得的多个观测数据,对用于根据解释变量输出目标变量的决策树模型执行学习,生成学习完毕的教师用模型。然后,学习装置通过对教师用模型输入规定的解释变量,取得针对规定的解释变量的规定的目标变量,生成规定的解释变量和规定的目标变量的组合作为用于对决策树模型执行学习的学习用数据。由此,能够容易地削减学习用数据。具体而言,以往需要考虑在学习中使用的数据的质量和特征性来从观测数据中选定学习用数据,而在本实施方式中不再需要为此花费工夫和时间。
104.另外,能够得到降低了噪声的学习用数据。具体而言,从教师用模型生成噪声的影响少的质量良好的学习用数据。
105.另外,本实施方式的学习装置设定多个观测数据中的解释变量的上限和解释变量的下限。然后,学习装置将存在于解释变量的上限与解释变量的下限之间的范围内的解释变量设定为规定的解释变量,将所设定的规定的解释变量输入到教师用模型,生成学习用数据。由此,能够在得到观测数据的范围内生成适当的学习用数据。关于这一点,从保证plc的动作的观点出发,在得不到观测数据的范围内生成学习用数据,基于该学习用数据对决策树模型执行学习的情况是不优选的。因此,根据本实施方式,通过在得到观测数据的范围内生成学习用数据,能够得到从保证plc的动作的观点看也适当的学习用数据。
106.另外,本实施方式的学习装置基于从教师用模型得到的学习用数据,对其他决策树模型执行学习。由此,根据降低了噪声的学习用数据生成决策树模型,因此能够得到精度良好的决策树模型。进而,由于不需要以往进行的数据的选定,所以能够简单地生成决策树模型。
107.另外,嵌入式设备被变更时的决策树模型的沿用变得容易。另外,由于能够根据一次生成的教师用模型随时生成学习用数据,因此能够进行决策树模型的尺寸的任意变更。
108.另外,本实施方式的plc使用由学习装置生成的决策树模型对制造装置等控制对象进行控制,因此执行高精度的控制。另外,能够使用计算量少的决策树模型对制造装置等控制对象进行控制。
109.此外,在上述实施方式中,对将所公开的技术的控制装置搭载于plc的例子进行了说明,但并不限定于此。例如,也能够应用于车辆的自动驾驶或驾驶辅助的功能。在该情况下,从车辆取得加速器、制动器的踩入量、方向盘的转向角、速度、加速度等数据作为解释变量,将解释变量作为输入,将通过决策树模型推断车辆的状态而得到的预测值作为目标变量输出。然后,将基于目标变量的控制信号输出到车辆即可。
110.另外,在上述实施方式中,如图7的4-3所示,以在解释变量的上限与解释变量的下限之间的范围r内生成学习用数据的情况为例进行了说明,但并不限定于此。例如,如图11所示,也可以将存在于解释变量的上限与解释变量的下限之间的范围r1内且存在于观测数据的密度为阈值以上的范围r2内的解释变量设定为规定的解释变量x。在该情况下,由于存在于范围r2内的观测数据的数量为规定的密度以上,因此若在该范围内生成学习用数据,则能够得到与观测数据类似的学习用数据,是更优选的。在该情况下,如图11所示,将所设定的规定的解释变量x向教师用模型m输入,生成作为解释变量x与目标变量y的组合的学习用数据p。
111.另外,在上述实施方式中,以在教师用模型的精度以及决策树模型的精度为规定精度以上的情况下结束学习处理的情况为例进行了说明,但并不限定于此。例如,如图12所示,也可以是控制系统1还具备显示装置29,用户确认显示于显示装置29的学习结果。在这种情况下,用户也可以确认显示在显示装置29上的教师用模型的精度和决策树模型的精度,来决定是否可以结束学习。
112.另外,在上述实施方式中,以使用决策树模型作为教师用模型的情况为例进行了说明,但并不限定于此。例如,可以使用与决策树模型不同种类的模型作为教师用模型。
113.另外,也可以由cpu以外的各种处理器执行在上述实施方式中cpu读入软件(程序)而执行的各处理。作为该情况下的处理器,可例示fpga(field-programmable gate array)等在制造后能够变更电路结构的pld(programmable logic device)、以及asic(application specific integrated circuit)等具有为了执行特定的处理而专门设计的电路结构的处理器即专用电路等。另外,可以通过这些各种处理器中的1个来执行各处理,也可以通过同种或不同种的2个以上的处理器的组合(例如,多个fpga、以及cpu与fpga的组合等)来执行各处理。另外,更具体而言,这些各种处理器的硬件构造是组合了半导体元件等电路元件的电路。
114.另外,上述实施方式以由学习装置10和plc 30构成的情况为例进行了说明,但并不限定于此。例如,也可以将学习装置10和plc 30构成为1个装置。另外,也可以将学习装置
10中的学习用数据生成处理构成为学习用数据生成装置,将学习装置10中的学习处理构成为学习装置。
115.另外,在上述实施方式中,对各程序预先存储(例如安装)于存储装置的方式进行了说明,但并不限定于此。程序也可以以存储在cd-rom、dvd-rom、蓝光光盘、usb存储器等存储介质中的方式提供。另外,程序也可以设为经由网络从外部装置下载的方式。
116.2020年3月13日申请的日本专利申请2020-044804号的公开整体通过参照被取入本说明书中。关于本说明书中记载的所有文献、专利申请以及技术标准,以通过参照而取入到与具体且分别记载各个文献、专利申请以及技术标准的情况相同的程度,通过参照而取入到本说明书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1