输入设备的制作方法
1.本公开涉及包括跟踪部分的输入设备。
背景技术:
2.存在一种技术,其在输入设备上提供发光部分,并通过相机检测发光部分以跟踪输入设备的位置和姿态。下面描述的ptl1公开了一种用于游戏操作的输入设备,其设置有球形发光部分。例如,ptl1的输入设备由安装在电视上的相机拍摄,并且输入设备的位置和姿态从视频中计算。
3.专利文献引用列表
4.ptl1日本专利公开no.2011-164932
技术实现要素:
5.[技术问题]
[0006]
在诸如ptl1的系统中,重要的是发光部分对于安装在电视上的相机是可见的,而不被用户的手或手臂覆盖。此外,已经考虑了一种系统,在该系统中,与ptl1中的系统不同,配置为拍摄输入设备的相机安装在头戴式显示器上,并且输入设备的位置和姿态根据由相机获得的视频来计算。在该系统中,基于输入设备的位置和姿态的运动图像(例如,游戏图像)通过头戴式显示器提供给用户。
[0007]
[问题的解决方案]
[0008]
本公开中提出的输入设备的示例包括:主体,其包括把手和用户用他/她的手指操作的至少一个操作构件;跟踪区域,其中布置有多个发光部分;第一部分,其在侧视图中位于至少一个操作构件的后侧,并形成跟踪区域的一部分;以及第二部分,位于第一部分的前侧,在与第一部分的方向不同的方向上延伸,并形成跟踪区域的另一部分。利用这种结构,可以实现相机关于发光部分的检测稳定性。
[0009]
本公开中提出的输入设备的另一示例包括其中提供了多个发光部分的跟踪区域。跟踪区域具有第一曲面和第二曲面,第一曲面位于输入设备的后部并且形成输入设备的外表面的一部分,第二曲面位于输入设备的前部并且形成输入设备的外表面的另一部分。第一曲面和第二曲面形成单个球面的一部分。利用这种结构,可以简化基于发光部分的检测位置对输入设备的位置和姿态的计算。
[0010]
本公开中提出的输入设备的又一示例包括其中提供了多个发光部分的跟踪区域。跟踪区域包括第一区域和第二区域,第一区域形成输入设备的外表面的一部分,并且其中布置有多个发光部分,第二区域形成输入设备的外表面的另一部分,并且其中布置有多个发光部分。布置在第一区域中的多个发光部分和布置在第二区域中的多个发光部分位于单个虚拟球面上。利用这种结构,可以简化基于发光部分的检测位置对输入设备的位置和姿态的计算。
[0011]
在本公开中提出的输入设备的又一示例包括:主体,其包括把手和用户用他/她的
手指操作的至少一个操作构件;后部,其位于至少一个操作构件的后侧,并且在后视图中至少覆盖把手的上侧;跟踪区域,包括其中布置有多个发光部分的第一区域和其中布置有多个发光部分的第二区域;以及用于将主体的上部和后部彼此连接的梁部分。第一区域设置在后部上,第二区域的至少一部分设置在主体上。利用该结构,可以防止第一区域和第二区域的相对位置改变,从而可以提高输入设备的位置和姿态的计算精度。
附图说明
[0012]
图1是示出了使用本公开中提出的输入设备的示例性系统的视图。
[0013]
图2是示出了本公开中提出的输入设备的第一示例的正视图。
[0014]
图3是图2所示输入设备的左侧视图。
[0015]
图4是图2所示输入设备的右侧视图。
[0016]
图5是图2所示输入设备的平面图。
[0017]
图6是图2所示输入设备的后视图。
[0018]
图7是示出了本公开中提出的输入设备的第二示例的左侧视图。
[0019]
图8是图7所示输入设备的后视图。
[0020]
图9是示出了本公开中提出的输入设备的第三示例的正视图。
[0021]
图10是图9所示输入设备的左侧视图。
[0022]
图11是图9所示输入设备的平面图。
[0023]
图12是图9所示输入设备的后视图。
[0024]
图13是示出了本公开中提出的输入设备的第四示例的平面图。
[0025]
图14是图13所示输入设备的右侧视图。
[0026]
图15是图13所示输入设备的左侧视图。
[0027]
图16是图13所示输入设备的视图,其中该输入设备面向由图13所示的中心线pc指示的方向。
[0028]
图17是图13所示输入设备的前视图。
[0029]
图18是图13所示输入设备的底视图。
[0030]
图19是示出了本公开中提出的输入设备的第五示例的透视图。
[0031]
图20是图19所示输入设备的透视图。
[0032]
图21是图19所示输入设备的侧视图。
[0033]
图22是图19所示输入设备的平面图。
[0034]
图23是图19所示输入设备的前视图。
具体实施方式
[0035]
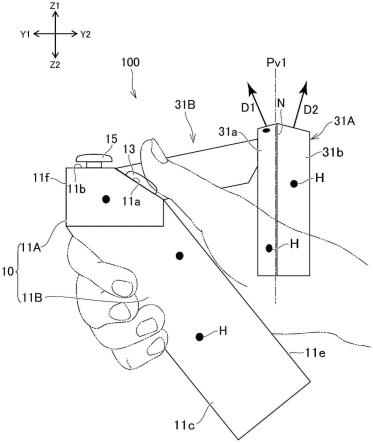
现在,描述本公开中提出的输入设备的示例。这里,图2中由z1和z2表示的方向分别称为“上方向”和“下方向”,图3中由y1和y2表示的方向分别称为“前方向”和“后方向”,图2中由x1和x2表示的方向分别称为“右方向”和“左方向”。这些方向对应于当用户握持和使用如图1所示的输入设备100时从用户看的方向。此外,在图2至图23中,黑色圆圈表示稍后描述的发光部分h。
[0036]
[系统的概述]
[0037]
如图1所示,输入设备100例如与头戴式显示器(hmd)2一起使用。用户将hmd2戴在他/她的头上,并将输入设备100握在他/她的右手和/或左手中。hmd2包括面向前方的相机。输入设备100设置有稍后描述的多个发光部分h。通过相机检测发光部分h的位置。参考发光部分的位置来计算输入设备100的位置和姿态(即,用户的手的位置和方向)。输入设备100包括用户用他/她的手指操作的多个操作构件(例如,操作按钮、操作杆或触摸传感器),如下所述。hmd2的显示部分显示根据输入设备100的位置、其姿态、在操作构件上进行的操作等生成的运动图像(例如,游戏图像)。
[0038]
输入设备100的位置和姿态可以通过安装在hmd2上的信息处理设备或者通过外部信息处理设备(例如,独立于hmd2的游戏设备或者个人计算机)来计算。输入设备100可以包括运动传感器(例如,加速度传感器或陀螺仪传感器)。信息处理设备不仅可以参考发光部分h的位置,还可以参考来自运动传感器的输出,来计算输入设备100的位置和姿态。此外,运动图像可以由安装在hmd2上的信息处理设备或者由外部信息处理设备生成。在外部信息处理设备计算输入设备100的位置等并生成运动图像的情况下,由相机获取的图像信息以无线或有线方式发送到外部信息处理设备。以无线或有线方式将生成的运动图像信息从外部信息处理设备发送到hmd2。
[0039]
注意,输入设备100可以包括麦克风、扬声器等。此外,输入设备100可以在其外表面上包括不用于位置和姿态跟踪的发光部分,例如,指示输入设备100的操作状态的发光部分或者用于在多个输入设备100之间进行识别的发光部分。
[0040]
[输入设备的总体配置]
[0041]
在以下描述中,详细描述用于右手的输入设备100。用于右手的输入设备100的外部形状和用于左手的输入设备100的外部形状是对称的。因此,通过颠倒描述中使用的术语“向右”、“右侧”、“向左”和“左侧”,输入设备100的元件(构件或部件)的相对位置的描述也适用于左手的输入设备100。左和右输入设备100可以在用户用他/她的手指操作的操作构件的数量或类型上彼此不同。此外,用于右手的输入设备100和用于左手的输入设备100不一定需要在操作构件的放置方面对称。
[0042]
如图3所示,输入设备100的主体10包括把手11b和操作部分11a,多个操作构件放置在操作部分11a上。主体10在其上部包括操作部分11a,并且把手11b从操作部分11a向下延伸。具体而言,把手11b从操作部分11a向下并向后倾斜地延伸。放置在操作部分11a上的操作构件可以在抓握把手11b的情况下用拇指操作。例如,用拇指、中指、无名指和小指的指肚握住把手11b。要用食指操作的操作构件(按钮)可以设置在操作部分11a的前表面11f和/或把手11b的前表面上。
[0043]
如图3所示,例如,操作按钮13和14以及操作杆15作为操作构件放置在操作部分11a上。操作按钮13和14放置在面向操作部分11a的后部向上方向的第一上表面11a上,并且例如用拇指操作。操作杆15放置在操作部分11a的第二上表面11b上,并且例如用拇指操作。第二上表面11b是位于第一上表面11a的前侧并且面朝上的表面。操作杆15是可沿径向倾斜和滑动的操作构件。
[0044]
设置在操作部分11a上的操作构件不限于这里描述的示例。例如,可以在操作部分11a上提供触摸传感器、触发按钮或配备触摸传感器的按钮。此外,设置在操作部分11a上的操作构件的数量可以是一个、两个或四个或更多。例如,多个操作按钮可以设置在第二上表
面11b上。在下面的描述中,操作按钮13和14以及操作杆15被称为“操作构件13、14和15”。
[0045]
输入设备100在其外表面上包括其中提供了多个发光部分h的跟踪区域。发光元件(具体而言,是发光二极管(led))设置在与跟踪区域中的发光部分h相对应的位置处。例如,输入设备100的外表面由覆盖led的外部构件形成。led远离外部构件的内表面放置。来自led的光可以通过光导构件被引导到外部构件(发光部分h)。注意,“发光部分h”是光在外部构件中穿过的部分。在外部构件由不透明材料形成并且光穿过的透明材料或孔形成在发光元件的位置处的结构中,形成有光穿过的透明材料或孔的部分用作发光部分h。另一方面,在透明外部构件放置在输入设备100的最外表面上并且发光元件(led)放置在外部构件的内侧上的结构中,面向发光元件的部分用作发光部分h。此外,在透明外部构件放置在输入设备100的最外表面上的结构中,光导构件放置在外部构件的内侧上,并且来自发光元件的光由光导构件引导,面向光导构件的端面(光出射表面)的部分用作发光部分h。
[0046]
如图3和图5所示,输入设备100包括后跟踪部分31a和前跟踪部分31b。后跟踪部分31a和前跟踪部分31b均设置有多个发光部分h。跟踪部分31a和31b的外表面形成跟踪区域。输入设备100不具有位于操作部分11a的前表面11f的前侧的跟踪部分。
[0047]
包括操作部分11a和把手11b的主体10也可以设置有发光部分h。也就是说,主体10的外表面的一部分也可以形成跟踪区域。在输入设备100的示例中,把手11b具有相对较大的宽度,因此,当用户用他/她的右手握住把手11b时,主体10的左侧表面11c不会被用户的手覆盖,如图2所示。因此,左侧表面11c可以设置有多个发光部分h。此外,操作部分11a的前表面11f(见图1)也可以设置有多个发光部分h。主体10的外表面的其他区域,例如把手11b的后表面和前表面,不设置有发光部分h。
[0048]
[后跟踪部分的位置]
[0049]
如图3所示,后跟踪部分31a位于放置在操作部分11a上的操作构件的后侧。在输入设备100的示例中,后跟踪部分31a位于放置在操作部分11a上的所有操作构件13、14和15的后侧。在后跟踪部分31a以这种方式放置的情况下,例如,与跟踪部分位于操作部分11a的前侧的结构相比,当输入设备100被挥动时作用在输入设备100上的力矩可以减小,从而可以减小用户的手腕或手臂上的负担。
[0050]
在输入设备100的侧视图中,把手11b相对于后跟踪部分31a向前倾斜。后跟踪部分31a位于把手11b的前部的后侧上。后跟踪部分31a在前后方向上的位置与把手11b的后端的位置相匹配。把手11b的后端位于后跟踪部分31a的下方。利用把手11b和后跟踪部分31a之间的这种位置关系,当握住把手11b的同时手腕向内或向外弯曲时,可以防止后跟踪部分31a干扰手腕。
[0051]
如图3所示,后跟踪部分31a的最上部位于比操作部分11a的上表面11b更高的位置,并且从操作部分11a向后间隔开。也就是说,后跟踪部分31a的最上部位于比上表面11b上位于最高位置的一个操作构件(图3所示的示例中的操作杆15)更高的位置,并且与该操作构件向后间隔开。允许拇指在前后方向上移动的空间保留在该操作构件和后跟踪部分31a之间。
[0052]
[后跟踪部分的形状]
[0053]
如图6所示,在输入设备100的后视图中,后跟踪部分31a具有弧形形状。在输入设备100的后视图中,主体10的上部位于后跟踪部分31a的内侧。在输入设备100的后视图中,
后跟踪部分31a的内侧上的左端31i位于把手11b的左侧表面11c的左侧。后跟踪部分31a的内侧上的右端31k位于把手11b的右侧表面11g的右侧。用户可以将把手11b握在置于后跟踪部分31a的内侧的手中。多个发光部分h沿后跟踪部分31a的圆周方向布置。如图5所示,发光部分h分布在整个后跟踪部分31a上。
[0054]
如图6所示,在输入设备100的后视图中,后跟踪部分31a的外部形状的至少一部分可以围绕在前后方向上延伸的中心线pc沿着正圆sp弯曲。更期望的是,在输入设备100的后视图中,后跟踪部分31a的外部形状在等于或大于后跟踪部分31a的外部形状的一半的范围内沿着正圆sp弯曲。后跟踪部分31a的大部分外部形状可以沿着正圆sp弯曲。在输入设备100的示例中,后跟踪部分31a的整个外部形状形成正圆sp的一部分。后跟踪部分31a围绕中心线pc在圆周方向上超过180度形成。在后跟踪部分31a具有以这种方式沿着正圆sp至少部分弯曲的外部形状的情况下,可以简化输入设备100的位置和姿态的计算处理。在后跟踪部分31a具有沿着正圆sp完全弯曲的外部形状的情况下,可以进一步简化计算处理。
[0055]
在输入设备100的平面图中,中心线pc(见图6)平行于把手11b的延伸方向(由图5中的线p2指示的方向)。此外,在输入设备100的侧视图中,中心线pc可以垂直于操作杆15的中心线pv3(见图4)。与输入设备100不同,在平面图中,中心线pc可以相对于把手11b的延伸方向(由图5中的线p2指示的方向)倾斜。此外,在侧视图中,中心线pc可以相对于垂直于操作杆15的中心线pv3(见图4)的平面倾斜。
[0056]
如图6所示,设置在后跟踪部分31a上的多个发光部分h与中心线pc之间的距离相同。在输入设备100的示例中,设置在后述的后倾斜表面31b上的多个发光部分h可以具有到中心线pc的相同距离,该距离由l1表示。此外,设置在后述的前倾斜表面31a上的多个发光部分h也可以具有到中心线pc的相同距离。
[0057]
如图3所示,在输入设备100的侧视图中,后跟踪部分31a可以在上下方向上直线延伸。由此,后跟踪部分31a的形状变得简单,从而可以简化基于发光部分h的位置对输入设备100的位置和姿态的计算处理。把手11b从操作部分11a向下并向后倾斜地延伸。因此,在输入设备100的侧视图中,后跟踪部分31a相对于把手11b倾斜。
[0058]
此外,如图5所示,在输入设备100的平面图中,后跟踪部分31a可以在左右方向上直线延伸。由此,后跟踪部分31a的形状变得简单,从而可以简化基于发光部分h的位置对输入设备100的位置和姿态的计算处理。在输入设备100的平面图中,后跟踪部分31a的左部位于操作部分11a的后侧,并且不与任何操作构件重叠。
[0059]
当使用输入设备100时,后跟踪部分31a覆盖用户手腕的上侧。后跟踪部分31a不容易被用户的身体覆盖,从而可以增强安装在hmd2上的相机关于发光部分h的检测稳定性。注意,后跟踪部分31a可以具有围绕中心线pc在圆周方向上360度形成的环形形状,而不是弧形形状。此外,作为又一示例,后跟踪部分31a可具有多边形(例如,四边形或五边形)形状或部分形成为弧形的多边形形状。
[0060]
前跟踪部分31b连接到后跟踪部分31a的上部。后跟踪部分31a的上部通过前跟踪部分31b连接到主体10。如图5所示,后跟踪部分31a包括位于后跟踪部分31a和前跟踪部分31b之间的连接部分31d的右侧并向下延伸的右侧部分31e,以及位于连接部分31d的左侧并向下延伸的左侧部分31f。部分31e和31f围绕中心线pc弯曲成弧形。
[0061]
如图2所示,在输入设备100的后视图中,连接部分31d可以位于比穿过中心线pc的
水平面p1更高的位置。此外,连接部分31d可以位于穿过中心线pc的垂直平面p2的右侧。也就是说,连接部分31d可以位于比水平面p1高并且在垂直平面p2右侧的区域中。由此,可以实现主体10和后跟踪部分31a之间通过前跟踪部分31b的联接,该联接不抑制拇指的运动和食指的运动。
[0062]
[后跟踪部分的倾斜表面]
[0063]
如图3所示,后跟踪部分31a的外表面包括前倾斜表面31a和后倾斜表面31b。后倾斜表面31b位于前倾斜表面31a的后侧。两个倾斜表面31a和31b可以在前后方向上彼此相邻。倾斜表面31a和31b可以彼此连接。
[0064]
前倾斜表面31a和后倾斜表面31b各自围绕中心线pc在圆周方向上延伸(见图6)。在输入设备100的后视图中,前倾斜表面31a和后倾斜表面31b各自沿着正圆sp完全弯曲。两个倾斜表面31a和31b之间的边界(脊线n)也在大于倾斜表面31a和31b的一半的范围内沿着正圆sp弯曲。
[0065]
如图3所示,前倾斜表面31a和后倾斜表面31b均设置有多个发光部分h。在前倾斜表面31a和后倾斜表面31b中的每一个上,多个发光部分h围绕中心线pc沿圆周方向布置。也就是说,后跟踪部分31a上的多个发光部分h布置成两行。
[0066]
如图3所示,前倾斜表面31a面对的方向(法线d1的方向)和后倾斜表面31b面对的方向(法线d2的方向)彼此不同。前倾斜表面31a的法线d1相对于垂直于中心线pc的方向(垂直于中心线pc的平面pv1)向前倾斜,后倾斜表面31b的法线d2相对于垂直于中心线pc的方向向后倾斜。利用这种结构,可以进一步增强安装在hmd2上的相机关于发光部分h的检测稳定性。
[0067]
如图5所示,后倾斜表面31b的宽度wb大于前倾斜表面31a的宽度wa。当用户使用输入设备100时,后倾斜表面31b比前倾斜表面31a更经常面对安装在用户头部的相机。利用后倾斜表面31b的宽度wb大于前倾斜表面31a的宽度wa的结构,当输入设备100被相机拍摄时,布置在后倾斜表面31b上的发光部分h的背景大于布置在前倾斜表面31a上的发光部分h的背景。因此,可以提高布置在后倾斜表面31b上的发光部分h的检测精度。
[0068]
输入设备100的后倾斜表面31b的宽度wb和前倾斜表面31a的宽度wa在围绕中心线pc的圆周方向上是恒定的。与此不同的是,后倾斜表面31b的宽度wb和前倾斜表面31a的宽度wa可以根据周向方向上的位置而变化。与输入设备100不同,后倾斜表面31b的宽度wb和前倾斜表面31a的宽度wa可以相同。
[0069]
[前跟踪部分的位置和形状]
[0070]
如图4所示,前跟踪部分31b位于后跟踪部分31a的前侧,并沿与后跟踪部分31a的方向不同的方向延伸。具体地,在输入设备100的侧视图中,当后跟踪部分31a在上下方向上延伸时,前跟踪部分31b在前后方向上延伸。此外,如图5所示,在输入设备100的平面图中,当后跟踪部分31a在左右方向上延伸时,前跟踪部分31b在前后方向上倾斜延伸。利用包括以这种方式在两个不同方向上延伸的跟踪部分31a和31b的输入设备100,可以增强相机关于发光部分h的检测稳定性。
[0071]
如图3所示,前跟踪部分31b位于把手11b的上方。前跟踪部分31b从后跟踪部分31a的上部和主体10的上部(更具体地,操作部分11a)中的一个延伸到另一个。在前跟踪部分31b以这种方式放置的情况下,可以防止设置在前跟踪部分31b上的发光部分h被用户的身
体覆盖。如图2所示,前跟踪部分31b连接到主体10的上部和后跟踪部分31a的上部。
[0072]
如图5所示,在输入设备100的平面图中,前跟踪部分31b位于主体10的上部(操作部分11a)的右侧,并且在从主体10的上部朝向后跟踪部分31a延伸的方向上延伸。更具体地,前跟踪部分31b从主体10的上部(操作部分11a)的右侧向后倾斜地延伸,以连接到后跟踪部分31a。前跟踪部分31b可以以弯曲或直线的方式从主体10的上部的右侧倾斜地向后延伸。
[0073]
如图2所示,当用户握住把手11b时,手掌的侧部位于前跟踪部分31b的下方。在输入设备100的前视图中,在前跟踪部分31b下方,保留由主体10和后跟踪部分31a包围的空间s1。握住把手11b的用户的手掌的一部分位于空间s1中。
[0074]
如图2所示,在输入设备100的前视图中,主体10相对于穿过输入设备100的左右方向上的中心的平面p2向左移位。通过以这种方式放置主体10,可以保留足够的空间作为用于放置右手手掌的空间s1,以便于用右手握持主体10进行操作。
[0075]
如图4所示,在前跟踪部分31b的上方保留了允许拇指移动的空间。当用户展开一直握着把手11b的手时,前跟踪部分31b位于用户的拇指和食指的根部(近端)之间。因此,当用户张开手时,可以防止输入设备100从手中掉落。也就是说,前跟踪部分31b可以用作挂在食指根部的悬挂部分。
[0076]
此外,如图4所示,当用户张开手时,拇指位于后跟踪部分31a的上部和前跟踪部分31b之间。因此,后跟踪部分31a的上部和前跟踪部分31b防止输入设备100朝向前方脱离手。也就是说,后跟踪部分31a可以用作挂在拇指上的悬挂部分。例如,当将输入设备100挂在他/她的手上时,用户可以握住hmd2来调整hmd2的位置。
[0077]
如图5所示,在输入设备100的平面图中,前跟踪部分31b和后跟踪部分31a之间的连接部分31d位于操作部分11a的右侧,并且与把手11b向右隔开。连接部分31d位于平面p2的右侧。在输入设备100的平面图中,在把手11b的右侧表面和前跟踪部分31b之间保留有间隙g1。由此,可以防止连接部分31d和前跟踪部分31b与抓握把手11b的用户的拇指干涉。
[0078]
如图2所示,前跟踪部分31b在比后跟踪部分31a的上端(正圆sp的最上部分)低的位置处连接到后跟踪部分31a。前跟踪部分31b和后跟踪部分31a之间的连接部分31d可以位于操作部分11a的上方或相同高度。
[0079]
如图2所示,在输入设备100的前视图中,保留了由前跟踪部分31b、主体10和后跟踪部分31a包围的空间s1。用户手掌的一部分被放置在空间s1中。在前跟踪部分31b的前部和操作部分11a上方保留用于允许拇指移动的空间。也就是说,在输入设备100的前视图中,前跟踪部分31b在放置手掌、中指等的空间s1和允许拇指移动的空间之间形成分隔。
[0080]
如图5所示,前跟踪部分31b具有上表面31g。上表面31g连接到操作部分11a的上表面11b。当不操作设置在操作部分11a的上表面11a或11b上的操作构件13、14和15时,用户可以将拇指缩回到前跟踪部分31b的上表面31g。在输入设备100的示例中,操作部分11a的上表面11b是水平表面。与此不同的是,操作部分11a的上表面11b可以像前跟踪部分31b的上表面31g一样倾斜地形成,并且上表面11b和31g可以向右并向上连续延伸。这样,用于操作操作构件14或15的拇指的运动可以是平滑的。
[0081]
[发光部分]
[0082]
如图4和图5所示,前跟踪部分31b具有侧表面(前表面)31h和上表面31g。侧表面
31h和上表面31g可以各自设置有一个或多个发光部分h。利用这种结构,可以增强相机关于发光部分h的检测稳定性。
[0083]
发光部分h可以设置在前跟踪部分31b(悬挂部分)的侧表面31h(图2)、操作部分11a的前表面11f(图2)、把手11b的左侧表面11c(图3)和后跟踪部分31a(悬挂部分)的后倾斜表面31b上。把手11b在左右方向上具有相对较大的宽度,因此,即使在用户用他/她的右手握住把手11b的情况下,把手11b的左侧表面11c也不会被手指(具体地,中指和无名指)覆盖。
[0084]
前跟踪部分31b的上表面31g(图5)、操作部分11a的上表面11b和后跟踪部分31a的前倾斜表面31a设置有发光部分h。操作部分11a的上表面11b和11a以及把手11b的后表面11e(见图5)没有设置发光部分h。
[0085]
[第二示例]
[0086]
本公开中提出的输入设备不限于上述输入设备100。现在,参考图7和图8,输入设备300被描述为在本公开中提出的输入设备的另一示例。在下文中,主要描述输入设备300和输入设备100之间的差异。未描述的内容可以类似于输入设备100中的内容。
[0087]
如图7所示,输入设备300的主体310包括把手311b和操作部分311a,多个操作构件放置在操作部分311a上。在操作部分311a上,例如,操作按钮13和14以及操作杆15被放置作为操作构件。
[0088]
如图7所示,输入设备300包括后跟踪部分331a和前跟踪部分331b。后跟踪部分331a和前跟踪部分331b均设置有多个发光部分h,并且其外表面形成跟踪区域。
[0089]
如图8所示,后跟踪部分331a具有完全包围在前后方向上延伸的中心线pc的环形形状。利用具有这种形状的后跟踪部分331a,可以放松用于实现发光部分h的检测稳定性的对输入设备100的姿态的限制。在输入设备300的后视图中,后跟踪部分331a具有围绕中心线pc的六边形形状。后跟踪部分331a可以具有圆形或矩形形状。
[0090]
如图8所示,前跟踪部分331b连接到后跟踪部分331a的上部331e。后跟踪部分331a包括上部部分331e、从上部部分331e的右侧向下延伸的右侧部分331f、从上部部分331e的左侧向下延伸的左侧部分331g以及在右侧部分331f和左侧部分331g之间延伸的下部部分331h。这四个部分围绕中心线pc。
[0091]
如图7所示,在输入设备300的侧视图中,把手311b相对于后跟踪部分331a向前倾斜。后跟踪部分331a的下部与把手311b的后部重叠。利用这种位置关系,当握住把手11b的同时手腕向内或向外弯曲时,可以防止后跟踪部分31a干扰手腕。在输入设备300的示例中,后跟踪部分31a的下部与把手311b的最后部311d(见图7)重叠。
[0092]
如图8所示,后跟踪部分331a的下部部分331h连接到把手311b。更具体地,后跟踪部分331a的下部部分331h连接到把手311b的下端(后端)。后跟踪部分331a的上部部分331e通过前跟踪部分331b连接到主体10。由此,后跟踪部分331a的下部部分331h和上部部分331e被支撑,使得后跟踪部分331a能够获得足够的刚度。因此,例如,可以防止当无意的外力作用在后跟踪部分331a上时,后跟踪部分331a的姿态(换句话说,设置在后跟踪部分331a上的发光部分h相对于主体10的位置)被改变。
[0093]
如图7所示,后跟踪部分331a的外表面包括前倾斜表面331a和后倾斜表面331b,类似于输入设备100的示例。在前倾斜表面331a和后倾斜表面331b的每一个上,多个发光部分
h沿前倾斜表面331a和后倾斜表面331b的延伸方向布置。
[0094]
后跟踪部分31a可以在上部部分331e、右侧部分331f、左侧部分331g和下部部分331h中的每一个上具有后倾斜表面31b和前倾斜表面31a。然后,每个部分上的后倾斜表面31b和前倾斜表面31a可以设置有发光部分h。此外,类似于输入设备100的示例,后倾斜表面331b的宽度(图5的wb)可以大于前倾斜表面331a的宽度(图5的wa)。
[0095]
如图7所示,把手311b的左侧表面311c可以设置有多个发光部分h。此外,操作部分311a的前表面311f也可以设置有多个发光部分h。主体10的外表面的其他区域,例如把手11b的后表面和前表面,不设置有发光部分h。
[0096]
如图8所示,在前跟踪部分331b下方,保留由主体310和后跟踪部分331a包围的空间s1。更具体地,保留由后跟踪部分331a的右侧部分331f和下部部分331h、主体310、上部部分331e和前跟踪部分331b包围的空间s1。主体310相对于穿过输入设备300的左右方向上的中心的平面p2向左移位。通过以这种方式放置主体310,可以增加空间s1,以便于用右手握住主体310进行操作。
[0097]
前跟踪部分331b从操作部分311a的右侧向后延伸,并且相对于平面p2向右移位。这样,可以防止前跟踪部分331b妨碍拇指的运动。
[0098]
[第三示例]
[0099]
现在,参考图9至图12,输入设备400被描述为在本公开中提出的输入设备的又一示例。在下文中,主要描述输入设备400和输入设备100之间的差异。未描述的内容可以类似于输入设备100中的内容。
[0100]
如图10所示,输入设备400的主体410包括把手411b和操作部分411a,多个操作构件放置在操作部分411a上。在操作部分411a上,例如,操作按钮13和14以及操作杆15被放置作为操作构件。
[0101]
如图9所示,输入设备400包括后跟踪部分431a和前跟踪部分431b。后跟踪部分431a和前跟踪部分431b均设置有多个发光部分h,并且其外表面形成跟踪区域。
[0102]
如图12所示,后跟踪部分431a具有完全包围在前后方向上延伸的中心线pc的环形形状。也就是说,后跟踪部分431a绕中心线pc在圆周方向上形成360度。
[0103]
如图12所示,在输入设备400的后视图中,后跟踪部分431a的外部形状的至少一部分可以围绕在前后方向上延伸的中心线pc沿着正圆sp弯曲。在后跟踪部分431a具有以这种方式沿着正圆sp至少部分弯曲的外部形状的情况下,可以简化输入设备400的位置和姿态的计算处理。后跟踪部分431a的大部分外部形状可以理想地沿着正圆sp弯曲。在输入设备400的示例中,整个后跟踪部分431a沿着正圆sp弯曲。设置在后跟踪部分431a上的多个发光部分h可以具有到中心线pc的相同距离l1(见图12)。
[0104]
后跟踪部分431a的一部分(例如,后跟踪部分431a和前跟踪部分431b之间的连接部分431d或者后跟踪部分431a和把手411b之间的连接部分)可以位于正圆sp的外侧。同样在这种情况下,设置在后跟踪部分431a上的多个发光部分h可以具有到中心线pc的相同距离l1(见图12)。
[0105]
如图10所示,在输入设备400的侧视图中,后跟踪部分431a可以在上下方向上直线延伸。由此,后跟踪部分431a的形状变得简单,从而可以简化基于发光部分h的位置的输入设备400的位置和姿态的计算处理。在输入设备400的侧视图中,后跟踪部分431a相对于把
手411b倾斜。
[0106]
此外,如图11所示,在输入设备400的平面图中,后跟踪部分431a可以在左右方向上直线延伸。由此,后跟踪部分31a的形状变得简单,从而可以简化基于发光部分h的位置的输入设备400的位置和姿态的计算处理。
[0107]
如图10所示,后跟踪部分431a的外表面包括前倾斜表面431a和后倾斜表面431b,类似于输入设备100的示例。前倾斜表面431a和后倾斜表面431b均设置有多个发光部分h。多个发光部分h在前倾斜表面431a和后倾斜表面431b上沿圆周方向布置。
[0108]
如图11所示,类似于输入设备100的示例,后倾斜表面431b的宽度wb可以大于前倾斜表面431a的宽度wa。前倾斜表面431a和后倾斜表面431b理想地沿着后跟踪部分431a的整个圆周形成。与此不同的是,前倾斜表面431a和后倾斜表面431b可以仅形成在后跟踪部分431a的一部分上(例如,后跟踪部分431a的上部)。
[0109]
如图10所示,把手411b的左侧表面411c可以设置有多个发光部分h。此外,操作部分411a的前表面411f也可以设置有多个发光部分h。主体10的外表面的其他区域,例如把手11b的后表面和前表面,不设置有发光部分h。
[0110]
如图10和图11所示,前跟踪部分431b从操作部分411a的右侧向后并向上延伸,以连接到后跟踪部分431a的上部。如图10所示,前跟踪部分431b可以以弯曲的方式向后并向上延伸。
[0111]
发光部分h可以设置在前跟踪部分431b的两个表面上。由此,可以提高布置在前跟踪部分431b上的发光部分h的检测精度。在输入设备400的示例中,发光部分h可以设置在前跟踪部分431b的上表面(前表面)431h(见图11)和右侧表面431i(见图11)上。
[0112]
后跟踪部分431a的下部连接到把手411b的最后部(最低部)。同时,后跟踪部分431a的上部通过前跟踪部分431b连接到主体410。由此,后跟踪部分431a的下部和上部被支撑,使得后跟踪部分431a能够获得足够的刚度。因此,例如,可以防止当无意的外力作用在后跟踪部分431a上时,后跟踪部分431a相对于主体10的姿态改变。注意,在本说明书中,后跟踪部分431a的上部是穿过后跟踪部分431a的上下方向上的中心的水平面p1(见图9)上方的部分,后跟踪部分31a的下部是水平面p1下方的部分。
[0113]
输入设备400的外表面上的跟踪区域包括在至少两个彼此分开的位置处形成单个球面sr(同一球面)的曲面。利用这种形状,可以促进基于由相机检测的发光部分h的位置的输入设备100的位置和姿态的计算处理。跟踪部分431a和431b以及主体410位于球面sr的内侧
[0114]
输入设备400在输入设备400的后部和前部具有这样的曲面。具体地,如图10和图11所示,后跟踪部分31a的后倾斜表面431b设置在输入设备400的后部。后倾斜表面431b形成虚拟球面sr的一部分,并且沿着球面sr弯曲。在输入设备400的平面图中,后倾斜表面431b位于用拇指操作的操作构件13、14和15的后侧。在输入设备400的后视图中,后倾斜表面431b具有围绕把手411b的环形形状(见图12)。与输入设备400不同,后跟踪部分431a可以具有弧形形状。
[0115]
后倾斜表面431b位于输入设备100的最后部。以这种方式放置的后倾斜表面431b使得安装在hmd2上的相机更容易捕捉来自后倾斜表面31b上的发光部分h的光。
[0116]
如图10和图11所示,操作部分411a的前表面411f设置在输入设备400的前部。操作
部分411a的前表面411f是位于操作构件13、14和15的前侧的表面。操作部分411a的前表面411f形成球面sr的一部分,并且沿着球面sr弯曲
[0117]
代替操作部分411a的前表面411f或者与操作部分411a的前表面411f一起,前跟踪部分431b的前表面(上表面)431h可以形成球面sr的一部分。
[0118]
如图9所示,在输入设备400的前视图中,由主体410和后跟踪部分431a包围的空间s1被保留在前跟踪部分431b下方。用户的手掌放置在空间s1中。主体410相对于穿过输入设备400的左右方向上的中心的平面p2向左移位。
[0119]
如图11所示,前跟踪部分31b和后跟踪部分31a之间的连接部分431d位于平面p2的右侧。在输入设备100的平面图中,前跟踪部分431b从把手411b的右侧表面向右间隔开。在输入设备100的平面图中,在把手411b的右侧表面和前跟踪部分431b之间保留了间隙g1。由此,可以防止连接部分431d和前跟踪部分431b与抓握把手11b的用户的拇指干涉。前跟踪部分431b可以从操作部分411a的右侧向右并向后倾斜地延伸。由此,间隙g1就可以增加了。
[0120]
[第四示例]
[0121]
现在,参考图13至图19,输入设备500被描述为在本公开中提出的输入设备的又一示例。在下文中,主要描述输入设备500和到目前为止描述的输入设备(特别是输入设备400)之间的差异。未描述的内容可能类似于到目前为止描述的输入设备中的内容。
[0122]
如图13所示,输入设备500的主体510包括把手511b和操作部分511a,多个操作构件放置在操作部分511a上。在操作部分511a上,例如,操作按钮13和14以及操作杆15被放置作为操作构件。此外,操作按钮16和17也可以放置在操作部分511a上。
[0123]
如图13所示,输入设备500包括后跟踪部分531a和前跟踪部分531b。后跟踪部分531a具有环形形状(见图16)。前跟踪部分531b将主体510的上部(具体地,操作部分511b)和后跟踪部分531a彼此连接。
[0124]
[前跟踪部分]
[0125]
如图17所示,前跟踪部分531b从主体510(操作部分511a)的上部向右延伸。前跟踪部分531b位于比后跟踪部分531a的中心线pc(见图16)高的位置。在前跟踪部分531b下方,预留了用于放置除拇指之外的四个手指的空间s1。
[0126]
如图17所示,在前跟踪部分531b的前部,前跟踪部分531b的上表面531h没有任何台阶地连接到操作部分511a的上表面511b。由此,用户可以在操作部分511a的上表面上平滑地移动他/她的手指。
[0127]
如图17所示,前跟踪部分531b的前部和操作部分511a的上表面531h和511b可以与水平面p4基本平行。这也有助于用户手指的平滑移动。这里,水平面p4是例如垂直于操作杆15的中心线pv3的平面。直线pv3也可以在操作按钮13和14的按压方向上延伸。
[0128]
如图14所示,在前跟踪部分531b的后部,前跟踪部分531b的上表面531h向后并向上倾斜地延伸。由此,前跟踪部分531b在上下方向上的宽度增加。因此,前跟踪部分531b和后跟踪部分531a之间的连接强度增加。此外,由于上表面531h的位置在前跟踪部分531b的前部中相对较低,所以可以在操作部分511a(或前跟踪部分531b的前部)和后跟踪部分531a之间保留足够大的空间,以允许放置在操作部分511a上的操作构件的拇指的移动,利用该拇指来操作操作构件。
[0129]
如图17所示,在前跟踪部分531b的前部,前跟踪部分531b的下表面531j也可以基
本平行于水平面p4。由此,当用户用他/她的食指按压稍后描述的触发按钮18时,用户可以沿着后跟踪部分531a的下表面531j平滑地移动食指。
[0130]
如图14和图17所示,在前跟踪部分531b的后部,前跟踪部分531b的下表面531j向后并向下倾斜地延伸。由此,前跟踪部分531b在上下方向上的宽度增加。因此,前跟踪部分531b和后跟踪部分531a之间的连接强度增加。此外,由于下表面531j的位置在前跟踪部分531b的前部中相对较高,所以可以在前跟踪部分531b的前部下方预留足够大的空间,以允许放置在操作部分511a的前侧上的用于操作构件(稍后描述的触发按钮18)的食指的移动。
[0131]
后跟踪部分531a的下部连接到把手511b的最后部(最低部)。此外,如上所述,前跟踪部分531b的上表面531h向后并向上倾斜地延伸,前跟踪部分531b的下表面531j向后并向下倾斜地延伸。因此,前跟踪部分531b和后跟踪部分531a之间的连接部分在上下方向上的尺寸较大。因此,可以增加后跟踪部分531a的刚度。然后,例如,可以防止当无意的外力作用在后跟踪部分531a上时,后跟踪部分531a和前跟踪部分531b(或操作部分511a)的相对位置改变。
[0132]
如图14所示,在输入设备500的侧视图中,前跟踪部分531b的下表面531j与把手511b重叠。由此,当使用输入设备500时,握住把手511b的手的手背在左右方向上面向前跟踪部分531b的后部。因此,例如,当用户暂时释放把手511b时,与手背接触的前跟踪部分531b的后部的面积增加。因此,容易保持输入设备500和手的相对姿态。
[0133]
注意,前跟踪部分531b的形状和放置不限于输入设备500的示例。前跟踪部分531b可以从操作部分511a向后并向上倾斜地延伸。在这种情况下,前跟踪部分531b的上表面531h和操作部分511a的上表面511b也可以倾斜。
[0134]
[后跟踪部分的取向]
[0135]
如图14和图16所示,后跟踪部分531a具有向后开口的环形形状。后跟踪部分531a具有完全围绕中心线pc2的环形形状。也就是说,后跟踪部分531a绕中心线pc2在圆周方向上形成360度。
[0136]
在输入设备500的示例中,中心线pc2是向后倾斜延伸的线。更具体地,如图13所示,在输入设备500的平面图中,中心线pc2相对于垂直平面p5倾斜。垂直平面p5可以是基本上沿着把手511b延伸的平面。此外,垂直平面p5可以包括操作杆15的中心线pv3。当用户握住把手511b时,后跟踪部分531a的中心相对于把手511b偏移/位于手腕在左右方向上的弯曲运动范围较宽的一侧。也就是说,在手腕相对于把手511b的运动范围较大的一侧,环形的后跟踪部分531a的开口面积较大。在把手511b和后跟踪部分531a处于这些相对位置的情况下,当用户抓握把手511b时,可以防止后跟踪部分531a干扰用户的手腕或手臂,从而可以实现舒适的操作。
[0137]
如图13所示,把手511b相对于穿过输入设备500的左右方向上的中心的垂直平面p2向左移位。后跟踪部分531a的中心线pc2是向后并向右倾斜地延伸的直线。换句话说,当用户握住把手511b时,把手511b相对于输入设备500的中心偏移/位于手腕在左右方向上的弯曲运动范围较窄的一侧,并且后跟踪部分531a的中心相对于把手511b偏移/位于手腕在左右方向上的弯曲运动范围较宽的一侧。也就是说,在手腕的运动范围相对于把手511b较大的一侧,环形后跟踪部分531a的开口面积较大。由于后跟踪部分531a以这种方式倾斜,当用户用他/她的右手握住把手511b时,可以防止后跟踪部分531a干扰用户的手腕或手臂,从
而可以实现舒适的操作。
[0138]
与图13至图18所示的示例不同,输入设备500可以用于左手。在这种情况下,把手511b相对于穿过输入设备500的左右方向上的中心的平面p2向右移位。同时,后跟踪部分531a的中心线pc2是向后并向左倾斜地延伸的直线。
[0139]
如图14所示,后跟踪部分531a的中心线pc2可以相对于水平面p4倾斜。更具体地,中心线pc2可以相对于水平面p4向后并向上倾斜地延伸。换句话说,当用户握住把手511b时,后跟踪部分531a的中心相对于把手511b偏移/位于手腕在上下方向上的弯曲运动范围较宽的一侧。也就是说,在手腕的运动范围相对于把手511b较大的一侧,环形开口的面积较大。同样,在后跟踪部分531a以这种方式倾斜的情况下,当用户握住把手511b时,可以防止后跟踪部分531a干扰用户的手腕或手臂,从而可以实现舒适的操作。注意,水平面p4可以是与操作杆15的中心线pv3基本垂直的平面。
[0140]
与输入设备500不同,后跟踪部分531a不一定需要围绕中心线pc2在圆周方向上形成360度。例如,在输入设备500的后视图中,后跟踪部分531a可以是仅覆盖把手511b的上侧的弧形。同样在这种情况下,如在输入设备500中一样,后跟踪部分531a的中心线pc2可以相对于水平面p4和/或垂直平面p5倾斜。
[0141]
[发光部分的放置]
[0142]
如图17所示,操作部分511a的前表面511f和前跟踪部分531b的前表面(侧表面)531i设置有沿左右方向布置的多个发光部分h。在输入设备500的示例中,操作部分511a的前表面511f设置有两个发光部分h,前跟踪部分531b设置有单个发光部分h。设置在前跟踪部分531b上的发光部分h的数量可以是两个或更多。
[0143]
如图17所示,设置在前表面511f和531i上的发光部分h可以沿着水平面p4布置。与此不同的是,发光部分h的排列方向可以相对于水平面p4倾斜。
[0144]
此外,前跟踪部分531b不一定需要设置有发光部分h。例如,在操作部分511a在左右方向上的尺寸大的情况下,虽然操作部分511a的前表面511f可以设置有更多的发光部分h,但是前跟踪部分531b不一定需要设置有发光部分h。在这种情况下,尽管前跟踪部分531b不用作跟踪部分,但是前跟踪部分531b可以用作用于将操作部分511a和后跟踪部分531a彼此连接并实现后跟踪部分531a的强度的梁部分。
[0145]
如图13和图15所示,后跟踪部分531a的外表面包括前倾斜表面531a和后倾斜表面531b,类似于输入设备400的后跟踪部分431a。前倾斜表面531a和后倾斜表面531b均设置有多个发光部分h。多个发光部分h沿着后跟踪部分531a的延伸方向(围绕中心线pc2的圆周方向)布置。类似于输入设备400的后跟踪部分431a,后倾斜表面531b的宽度(图5的wb)可以大于前倾斜表面531a的宽度(图5的wa)。
[0146]
设置在前倾斜表面531a上的发光部分h的位置和设置在后倾斜部531b上的发光部分h的位置可以在后跟踪部分531a的延伸方向(围绕中心线pc2的圆周方向)上彼此偏移。由此,发光部分h之间的距离增加,从而可以便于识别两个相邻发光部分h的位置。因此,可以提高安装在hmd2(见图1)上的相机对输入设备500的位置和姿态的检测的精度。
[0147]
输入设备500的外表面上的跟踪区域包括在操作构件(操作杆15等)的前侧和操作构件(操作杆15等)的后侧形成单个球面sr(相同球面)的曲面。具体地,如图13和图15所示,位于输入设备500的后部的后倾斜表面531b形成虚拟球面sr的一部分,并且沿着球面sr弯
曲。此外,如图14所示,操作部分511a的前表面511f也形成球面sr的一部分,并且沿着球面sr弯曲。此外,如图13所示,前跟踪部分531b的前表面531i也形成球面sr的一部分。利用这种形状,可以便于基于由安装在hmd2上的相机检测的发光部分h的位置的输入设备500的位置和姿态的计算处理。
[0148]
这样,多个发光部分h设置在后跟踪部分531a的后倾斜表面531b以及前跟踪部分531b和主体510的前表面531i和511f上。此外,表面531b、531i和511f是形成球面sr的一部分的曲面。因此,布置在后倾斜表面531b上的多个发光部分h和布置在前表面531i和511f上的多个发光部分h位于单个虚拟球面sr上。利用以这种方式布置的发光部分h,可以促进基于由安装在hmd2上的相机检测的发光部分h的位置的输入设备500的位置和姿态的计算处理。此外,把手511b和操作构件被放置在虚拟球面sr内。因此,当用户通过抓握把手511b来使用输入设备时,发光部分h不会被用户的手覆盖。此外,由于发光部分h位于用户的手放置在其内的虚拟球面sr上,可以促进手的位置的计算处理。
[0149]
注意,与输入设备500不同,后跟踪部分531a的后倾斜表面531b以及前跟踪部分531b和主体510的前表面531i和511f中的一个或两个不一定需要是曲面。例如,前表面531i或511f可以是向上并向后倾斜地延伸的平面。此外,后倾斜表面531b可以是朝向中心线pc2向后倾斜地延伸的平面。同样在这种情况下,操作构件(操作杆15等)的前侧上的多个发光部分h和操作构件的后侧上的多个发光部分h可以位于单个球面sr上。具体地说,布置在后倾斜表面531b上的多个发光部分h和布置在前表面531h和511f上的多个发光部分h可以位于单个虚拟球面sr上。由此,可以便于基于由安装在hmd2上的相机检测到的发光部分h的位置的输入设备500的位置和姿态的计算处理。
[0150]
如图15所示,前跟踪部分531b的前倾斜表面531a是朝向中心线pc2向后倾斜延伸的表面。如图14所示,前跟踪部分531b的前表面以弯曲的方式向后延伸,以连接到后跟踪部分531a的右部上的后倾斜部分531b。因此,前倾斜表面531a没有形成在后跟踪部分531a的右部上。
[0151]
在输入设备500中,除了后跟踪部分531a和前跟踪部分531b的前表面531h和511f以及主体510之外的区域没有设置发光部分h。与输入设备500不同,例如,把手511b的左侧表面511c(见图15)也可以设置有发光部分h。此外,与输入设备500不同,发光部分h可以设置在前跟踪部分531b的上表面531h和前表面(侧表面)531i上。由此,可以进一步提高关于布置在前跟踪部分531b上的发光部分h的检测精度。
[0152]
[操作构件]
[0153]
如上所述,输入设备500包括作为其操作构件的操作按钮13、14、16和17以及操作杆15(参见图13)。例如,操作按钮13和14是用于选择或操作游戏角色或对象的按钮。同时,操作按钮16是用于共享游戏的功能按钮,并且是用于捕捉正在玩的游戏的游戏屏幕或者从正在再现的运动图像中捕捉静止图像并将所捕捉的图像存储在hmd2或连接到hmd2的服务器设备中的按钮。例如,操作按钮17是用于显示用户可以选择的各种功能的按钮。例如,用户可以操作操作按钮17来从正在进行的多个游戏应用中选择他/她要玩的游戏应用。
[0154]
如图13所示,操作按钮13和14以及操作按钮16可以放置在操作杆15的相对两侧。例如,操作按钮13和14可以放置在操作杆15的左侧,操作按钮16可以放置在操作杆15的右侧。通过这种放置,用户可以将他/她的拇指放置在初始位置(操作杆15处),并且根据需要
将拇指从操作杆15平滑地移动到操作按钮13、14或16。
[0155]
操作按钮17可以放置在操作杆15的后侧。设置在操作部分511a的上表面511b上的操作按钮13、14、16和17是用拇指操作的按钮。这些按钮围绕操作杆15沿圆周方向布置。因此,用户可以将他/她的拇指放在初始位置(操作杆15处),并且根据需要将拇指从操作杆15平滑地移动到操作按钮13、14、16和17中的任何一个。
[0156]
如图15所示,触发按钮18可以放置在操作部分511a的前表面511f下方。主体510可以包括驱动装置,该驱动装置被构造成移动触发按钮18。例如,当按压触发按钮18时,驱动装置产生对触发按钮18的运动的反作用力。例如,驱动装置可以包括电动机作为其驱动源。
[0157]
如图15所示,主体510可以包括把手511b上的操作按钮19。操作按钮19可以设置在把手511b的侧表面上。输入设备500可以是用于右手的设备,并且操作按钮19可以设置在例如把手511b的左侧表面511c上。通过以这种方式放置操作按钮19,用户可以用他/她的中指操作操作按钮19。
[0158]
到目前为止描述的一个或多个操作按钮13、14和16至18可以各自具有检测用户手指与按钮表面的接触或接近的触摸感测功能。此外,操作杆15还可以具有检测用户手指对操作杆15的上表面的接触或接近的触摸感测功能。
[0159]
[总结]
[0160]
如上所述,在输入设备100、300、400或500中,主体10、110、310、410或510包括把手11b、311b、411b或511b以及用户用他/她的手指操作的至少一个操作构件13、14、15、16、17、18或19。输入设备100、300、400或500包括位于至少一个操作构件的后侧并且形成跟踪区域的一部分的后跟踪部分31a、331a、431a或531a,以及位于后跟踪部分的前侧并且在与后跟踪部分的方向不同的方向上延伸的前跟踪部分31b、331b、431b或531b。以这种方式,输入设备100、300、400或500包括在不同方向上延伸的两个跟踪部分,从而可以增强安装在hmd2上的相机关于发光部分h的检测稳定性。
[0161]
前跟踪部分31b、331b、431b或531b从主体的上部和后跟踪部分31a、331a、431a或531a中的一个向另一个延伸。由此,即使在用户放开把手的情况下,前跟踪部分31b、331b、431b或531b被抓在手上,从而防止输入设备掉落。
[0162]
前跟踪部分31b、331b、431b或531b将主体10、110、310、410或510的上部和后跟踪部分31a、331a、431a或531a彼此连接。由此,可以增加输入设备的刚性,并且可以防止后跟踪部分331a与主体10、110、310、410或510的相对位置改变。
[0163]
前跟踪部分31b、331b、431b或531b具有当用户展开一直握着把手的手时,位于用户的拇指和手掌的边缘部分之间的形状。
[0164]
在输入设备的平面图中,前跟踪部分31b、331b、431b或531b位于主体10、110、310、410或510的上部的右侧,并且从主体的上部朝向后跟踪部分31a、331a、431a或531a延伸。
[0165]
在输入设备的平面图中,主体10、110、310、410或510相对于穿过输入设备的左右方向上的中心的平面p2向左移位,并且前跟踪部分31b、331b、431b或531b相对于平面p2向右移位。这样,可以用右手握住主体容易地进行操作,并且可以防止前跟踪部分妨碍拇指的运动。
[0166]
前跟踪部分31b、331b、431b或531b从主体的上部向右并向后延伸,以连接到平面p2右侧的后跟踪部分31a、331a、431a或531a。利用这种结构,可以更容易地保留允许手指移
动的空间。
[0167]
在输入设备的平面图中,前跟踪部分31b、331b、431b或531b与后跟踪部分31a、331a、431a或531a之间的连接部分从把手向右间隔开。这样,在把手的右侧表面和前跟踪部分之间保留了间隙g1。这样,可以防止前跟踪部分和后跟踪部分之间的连接部分以及前跟踪部分干扰拇指。
[0168]
在输入设备的平面图中,主体10、110、310、410或510相对于穿过输入设备的左右方向上的中心的平面p2向左移位,并且在输入设备的前视图中,前跟踪部分31b、331b、431b或531b从主体10、110、310、410或510的上部向右延伸。
[0169]
后跟踪部分31a、431a或531a的上部具有弧形形状,在输入设备的后视图中至少覆盖把手的上侧。由此,后跟踪部分31a、431a或531a上的发光部分h不容易被安装在hmd2上的相机隐藏,从而可以提高输入设备的姿态和位置的检测精度。
[0170]
在输入设备的后视图中,后跟踪部分331a、431a或531a具有环形形状。由此,例如,即使在输入设备的姿态在上下方向上反转的情况下,也可以提高输入设备的姿态和位置的检测精度。
[0171]
后跟踪部分531a具有围绕倾斜向后延伸的中心线pc2的环形形状。这样,可以防止用户的手腕和后跟踪部分之间的干涉。后跟踪部分531a可以具有覆盖倾斜向后延伸的中心线pc2的弧形形状。
[0172]
后跟踪部分431a或531a基本上是圆形的。由此,可以促进基于由相机检测的发光部分h的位置的输入设备的位置和姿态的计算处理。
[0173]
后跟踪部分431a或531a连接到把手的下部。后跟踪部分431a或531a和把手之间的连接部分很少干扰输入设备的使用。
[0174]
在输入设备的侧视图中,后跟踪部分31a、331a、431a或531a位于把手的前部的后侧。
[0175]
后跟踪部分531a具有围绕中心线pc2的环形形状,该中心线pc2在输入设备的侧视图中向后并向上倾斜地延伸。这样,可以防止用户的手腕和后跟踪部分之间的干涉。后跟踪部分531a可以具有围绕中心线pc2的弧形形状。
[0176]
把手相对于输入设备的左右方向上的中心向左移位。后跟踪部分531a具有围绕中心线pc2的环形形状,该中心线pc2在输入设备的平面图中向后并向右倾斜地延伸。这样,可以防止用户的手腕和后跟踪部分之间的干涉。后跟踪部分531a可以具有围绕中心线pc2的弧形形状。
[0177]
在输入设备400或500中,跟踪区域具有形成在输入设备400或500的后部上的后倾斜表面431b或531b以及形成在输入设备400或500的前部上的前表面411f、511f或531i。后倾斜表面431b或531b以及前表面411f、511f或531i形成单个球面sr的一部分。可以促进基于由相机检测的发光部分h的位置的输入设备400或500的位置和姿态的计算处理。
[0178]
在输入设备400或500的平面图中,后倾斜表面431b或531b位于至少一个操作构件(例如,操作杆15)的后侧,并且前表面411f、511f或531i位于至少一个操作构件(例如,操作杆15)的前侧。由此,可以放松用于实现关于发光部分h的检测稳定性的对输入设备400或500的姿态的限制。
[0179]
在输入设备400或500中,后倾斜表面431b或531b具有至少覆盖把手411b或511b的
上侧的弧形或环形形状。后跟踪部分431a或531a上的发光部分h不容易被安装在hmd2上的相机隐藏,从而可以提高输入设备的姿态和位置的检测精度。
[0180]
在输入设备400或500中,跟踪区域包括其上布置有多个发光部分h的后倾斜表面431b或531b以及其上布置有多个发光部分h的前表面411f、511f或531i。布置在后倾斜表面431b或531b上的多个发光部分h和布置在前表面411f、511f或531i上的多个发光部分h位于单个虚拟球面sr上。可以促进基于由相机检测的发光部分h的位置的输入设备400或500的位置和姿态的计算处理。
[0181]
在输入设备400或500的平面图中,布置在后倾斜表面431b或531b上的多个发光部分h位于至少一个操作构件(例如,操作杆15)的后侧,并且布置在前表面411f、511f或531i上的多个发光部分h位于至少一个操作构件(例如,操作杆15)的前侧。由此,可以放松用于实现关于发光部分h的检测稳定性的对输入设备400或500的姿态的限制。
[0182]
在输入设备400或500中,布置在后倾斜表面431b或531b上的多个发光部分h中的至少一个设置在面向输入设备的后上方的表面上。此外,其上设置有多个发光部分h的前表面411f、511f或531i面向输入设备400或500的前方向。由此,可以放松用于实现关于发光部分h的检测稳定性的对输入设备400或500的姿态的限制。
[0183]
输入设备100、300、400或500包括主体10、110、310、410或510,主体10、110、310、410或510包括把手和用户用他/她的手指操作的至少一个操作构件(例如,操作杆15)。此外,输入设备100、300、400或500包括后跟踪部分31a、331a、431a或531a,其位于至少一个操作构件的后侧,并且在后视图中至少覆盖把手的上侧。此外,输入设备100、300、400或500包括用于将主体10、110、310、410或510的上部和后跟踪部分31a、331a、431a或531a彼此连接的梁部分(前跟踪部分31b、331b、431b或531b对应于上述输入设备中的“梁部分”)。可以防止后跟踪部分与主体10、110、310、410或510(即,设置在后跟踪部分上的发光部分h和设置在主体上的发光部分h)的相对位置改变,从而可以提高输入设备的位置和姿态的计算精度。
[0184]
注意,在输入设备100、300、400或500的示例中,前跟踪部分31b、331b、431b或531b不一定需要连接到主体10、110、310、410或510和后跟踪部分31a、331a、431a或531a。也就是说,前跟踪部分31b、331b、431b或531b可以仅连接到主体10、110、310、410或510和后跟踪部分31a、331a、431a或531a中的一个。同样在这种情况下,当用户展开已经握住把手11b的手时,前跟踪部分31b位于用户的拇指和食指的根部(近端)之间。由此,当用户张开手时,可以防止输入设备100从手中掉落。
[0185]
[第五示例]
[0186]
图19至图23是示出本公开中提出的输入设备的又一示例的图。现在,详细描述用于右手的输入设备200。用于右手的输入设备200的外部形状和用于左手的输入设备200的外部形状是对称的。放置在稍后描述的操作部分211a上的操作构件的数量和种类在左和右输入设备200之间可以不同。此外,操作构件可以不对称地放置在用于右手的输入设备200和用于左手的输入设备200之间。
[0187]
如图19所示,输入设备200包括主体210,主体210包括把手211b和操作部分211a,多个操作构件放置在操作部分211a上。主体210在其上部包括操作部分211a,并且把手211b形成在操作部分211a的下方。放置在操作部分211a上的操作构件可以在抓握把手211b的情
况下用拇指或食指操作。作为操作构件,例如,操作按钮213和214以及操作杆215放置在操作部分211a上。操作按钮213放置在操作部分211a的前表面211a上,并且例如用食指操作。例如,操作按钮214和操作杆215放置在操作部分211a的上表面上,并且用拇指操作。在输入设备200中,多个操作按钮216放置在把手211b上。
[0188]
如图22所示,输入设备200包括其中布置了多个发光部分h的跟踪区域。跟踪区域包括后弯曲部分231a的外表面和前联接部分231b的外表面(见图23)。
[0189]
如图22所示,后弯曲部分231a包括内壁部分231a和外壁部分231c。内壁部分231a从主体210向后延伸。外壁部分231c与内壁部分231a向右间隔开。用户可以用右手握住位于内壁部分231a和外壁部分231c之间的把手211b。当用户握住把手211b时,内壁部分231a位于手的内侧,外壁部分231c位于手的外侧。后联接部分231b位于内壁部分231a和外壁部分231c的后侧,并连接内壁部分231a和外壁部分231c的上部。内壁部分231a的下部和外壁部分231c的下部彼此不相连。因此,在输入设备200的后视图中,后弯曲部分231a具有向下开口的大致u形。当使用输入设备200时,后弯曲部分231a覆盖用户手腕的上侧。
[0190]
如图22所示,多个发光部分h布置在内壁部分231a、外壁部分231c和后联接部分231b中的每一个上。利用具有这种形状的后弯曲部分231a,设置在后弯曲部分231a上的发光部分h不容易被用户的身体覆盖,从而可以增强安装在hmd2上的相机关于发光部分h的检测稳定性。
[0191]
如图22所示,前联接部分231b位于后弯曲部分231a的前侧。在输入设备100的平面图中,后联接部分231b在左右方向上延伸越过用户手腕的上侧。外壁部分231c以弯曲的方式从后联接部分231b向前延伸。前联接部分231b进一步弯曲以向前并向左倾斜地延伸。在输入设备100的示例中,内壁部分231a、外壁部分231c、后联接部分231b和前联接部分231b在彼此不同的方向上延伸,并且在平面图中均具有在前后方向上伸长的椭圆形形状。
[0192]
如图23所示,前联接部231b位于外壁部分231c的上部和主体210的上部(操作部分211a)之间,并将两个上部彼此连接。如图21所示,前连接部分231b位于主体210上部的右侧(见图23),并以弯曲的方式从主体210的上部向后延伸,从而连接到外壁部分231c的上部。在前联接部分231b以这种方式放置的情况下,当用户张开已经握住把手211b的手时,前联接部分231b位于用户的拇指和食指的根部(近端)之间。因此,当用户张开手时,可以防止输入设备100从手中掉落。
[0193]
如图22所示,主体210相对于穿过输入设备200的左右方向上的中心的平面p3向左移位。同时,前联接部分231b相对于平面p3向右移位。通过这种放置,可以容易地用右手握住主体210进行操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1