用于经由大脑解剖学的多模态3D分析优化探针在脑部中的规划和放置的方法
用于经由大脑解剖学的多模态3d分析优化探针在脑部中的规划和放置的方法
相关申请交叉引用
1.本技术要求于2020年2月20日提交的题为“methods of identification and avoiding visual deficits after laser interstitial thermal therapy for mesial temporal lobe epilepsy(标识和避免针对颞叶内侧癫痫的激光间质热治疗后的视力障碍的方法)”的美国临时专利申请第62/978,868号的优先权,该临时专利申请特此通过引用以其整体并入本文。
背景技术:
2.颅内电极被植入患者体内,以用于记录高时空分辨率颅内脑电图(iceeg)数据以及用于调节神经回路和系统。患者接受植入最常用于评估神经系统疾病,如癫痫、运动障碍和精神疾病。
3.在患有医学上难治性癫痫的患者中的一部分中,癫痫发作可以被定位到可定义的病灶,并且在这种示例性情况下,外科手术干预通过直接切除、移除或破坏病理性脑组织(包括微创方法,该微创方法包括但不限于基于导管的组织消融),为停止进一步的癫痫发作活动提供了可能。不幸的是,在许多情况下,患者不具有仅使用非侵入性研究或评估就可标识的病变,非侵入性研究或评估可包括对脑部活动的研究,包括但不限于头皮脑电图(eeg)和脑磁图(meg),以及用于标识结构性病变的解剖成像模态,诸如磁共振成像(mri)或计算机断层扫描(ct)。电极也被放置以用于癫痫的神经调节—目前要么在丘脑的前核中,要么在癫痫发作的发生部位。
4.运动障碍(帕金森病、肌张力障碍、特发性震颤)也很常见。这些疾病的治疗通常是外科手术,因为药物通常会导致不良副作用。深部基底神经节核(例如丘脑底核、苍白球内部和丘脑的vim核)及其相关联的白质通路通常是针对这些疾病的目标。
5.在药物无效的情况下,精神疾病正迅速成为神经调节的目标—这些包括难治性抑郁症、强迫症、创伤后应激障碍和饮食失调的情况。
6.在这些示例性患者中,植入硬膜下电极(sde)和/或立体脑电图(seeg)电极和/或其他探针或导管或记录设备是用于如下的常用策略:精确定义健康和/或功能(eloquent)的脑部区域与可能是构成假定病理网络的基础的病理学脑部区域之间的关系,以用于诊断或用于刺激以引起神经调节。
技术实现要素:
7.一种方法包括:获得单个受试者脑部的第一成像扫描和第二成像扫描。第一成像扫描被转换为第一数据集,并且第二成像扫描被转换为第二数据集。将序列自适应多模态分割算法应用于第一数据集和第二数据集。序列自适应多模态分割算法执行自动基于强度的组织分类,以生成第一标记数据集和第二标记数据集。第一标记数据集和第二标记数据集被自动彼此共同配准(co-register),以基于第一标记数据集和第二标记数据集生成变
换矩阵。变换矩阵被应用,以对齐第一数据集和第二数据集。
8.一种用指令编码的非瞬态计算机可读介质,该指令可由一个或多个处理器执行以获得单个受试者脑部的第一成像扫描和第二成像扫描,并将第一成像扫描转换为第一数据集,以及将第二成像扫描转换为第二数据集。指令也可由一个或多个处理器执行以将序列自适应多模态分割算法应用于第一数据集和第二数据集,其中序列自适应多模态分割算法执行自动基于强度的组织分类以生成第一标记数据集和第二标记数据集。指令可进一步由一个或多个处理器执行以自动将第一标记数据集和第二标记数据集彼此共同配准,以基于第一标记数据集和第二标记数据集生成变换矩阵。指令还可进一步由一个或多个处理器执行以应用变换矩阵来对齐第一数据集和第二数据集。
9.一种系统包括一个或多个处理器和存储器。存储器被耦合到一个或多个处理器,并存储指令。指令配置一个或多个处理器以:获得受试者脑部的第一成像扫描和第二成像扫描,并且将第一成像扫描转换为第一数据集,并将第二成像扫描转换为第二数据集。指令也可配置一个或多个处理器以将序列自适应多模态分割算法应用于第一数据集和第二数据集,其中序列自适应多模态分割算法执行自动基于强度的组织分类以生成第一标记数据集和第二标记数据集。指令进一步配置一个或多个处理器以自动将第一标记数据集和第二标记数据集彼此共同配准,以基于第一标记数据集和第二标记数据集生成变换矩阵。指令还进一步配置一个或多个处理器以应用变换矩阵来对齐第一数据集和第二数据集。
附图说明
10.对于各种示例的详细描述,现在将参考附图,其中:
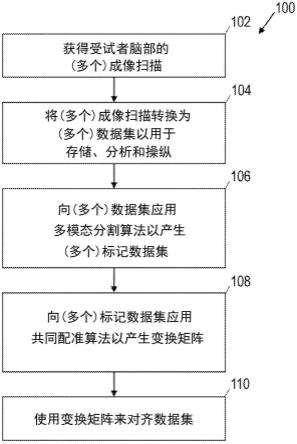
11.图1显示了根据本公开的用于脑成像扫描的共同配准的方法的流程图。
12.图2显示了根据本公开的用于生成皮质和皮质下脑部区域的表面模型的方法的流程图。
13.图3显示了根据本公开的用于自动分割脑脉管系统的方法的流程图。
14.图4显示了根据本公开的用于可视化底层(underlying)脑部结构的方法的流程图。
15.图5显示了根据本公开的用于自动规划电极或探针植入的方法的流程图。
16.图6显示了根据本公开的用于自动定位、命名和可视化先前植入的电极或穿透脑部探针的方法的流程图。
17.图7显示了根据本公开的对单个受试者执行的不同神经成像模态的共同配准的图形表示。
18.图8a-8f显示了根据本公开的描绘海马以及丘脑的2d/3d表面模型的生成的图形表示。
19.图9a-9d显示了根据本公开的分割人类脑脉管系统的示例步骤。
20.图10a-10w显示了根据本公开的使用切割平面以用于优化对皮质和皮质下结构和/或功能表示的可视化的任意角度与表面和体积模型相交。
21.图11a-11r显示了根据本公开的用于电极或穿透探针植入的群体导出的解剖靶向的示例。
22.图12a-12e显示了自动电极定位和标记的图形表示。
technology initiative,nifti)描述的数据格式,并且该3d数据集是根据患者的脑部扫描的成像文件生成的,该3d数据集的示例性实施例可以是根据由医学数字成像和通信(dicom)标准定义的标准存储的图像。序列自适应多模态分割算法被应用于数据集而无需进一步或附加的预处理(包括但不限于强度归一化和/或体积构象),以生成原始数据集的相同体积和几何形状的新标记分割数据集,但是其中每个体素(即3d像素)已将其原始强度值替换为与唯一解剖区域和/或该体素属于各个脑部区域的概率(其示例性实施例可包括由模板或参考图谱(atlas)定义的脑部区域的概率分布)相关的数字。分割数据集随后被用作共同配准算法的“移动”输入,以与从同一患者的相同和/或不同的成像模态生成的等效分割“目标”数据集对齐。共同配准算法还将生成作为计算输出的一部分的变换矩阵,该变换矩阵描述了以对称方式精确复制输入“移动”数据集与“目标”数据集之间的对齐所需的数学运算,所述以对称方式是以前向(即,将“移动”数据集对齐到“目标”数据集)和后向(即,将“目标”数据集对齐到“前向”数据集)两者的方式。一旦生成变换矩阵,就可以将变换矩阵应用于共享原始移动数据集的体积几何形状的任何数据集,以使其与原始目标数据集对齐。本公开描述了分割算法的全新应用,以基于使用分割生成的变换矩阵,使用相同或不同的成像模态(例如,mri和ct)对同一受试者获得的成像数据集进行共同配准,它提供了如下的技术改进:显著推进了脑部图像的受试者体内多模态共同配准的现有技术。尽管存在可能是其他当前现有共同配准方法中失败的常见原因的成像特征,但本公开的实现导致令人满意的结果,该常见原因包括但不限于解剖缺陷、病变和/或肿块、异物、出血和/或成像数据集之间的强度差异和/或使用的成像脉冲序列和/或获取图像的扫描仪平台参数的差异。
30.本公开的实施例涉及如下的方法:使用由序列自适应多模态分割算法生成的颅外边界层以生成解剖学上准确的皮肤和颅骨模型,以促进seeg电极的外科手术前规划和植入后定位。直接从ct成像分割颅外边界元素是一种全新方法,该全新方法是对现有方法的改进。使用应用于t1加权mri数据集的方法生成颅骨边界层也是该领域的全新方法,该全新方法展示了对用于估计这些层的当前边界元素建模方法的改进。这些改进通过为电极植入提供颅骨-脑部和皮肤-颅骨边界层,为外科手术电极植入的规划提供了切实的益处。
31.本公开的实施例涉及如下的方法:使用脑脊液(csf)体积以及灰质和白质皮质层的分割作为掩模(mask),以帮助从包括但不限于对比加权t1 mr成像的3d脑成像数据集中分割血管。在一些示例性实施例中,mr成像数据集可以使其强度值放大(up-scaled),以便更好地将可能反映血管的高强度体素与具有相似(但较低)强度值的周围组织(例如,白质束或来自部分体积平均)分开。使用csf边界层来掩盖(mask)和约束用于使用放大对比mri进行的血管分割的参数空间是一种促进脑脉管系统分割的新方法。
32.本公开的实施例涉及如下的方法:在一些示例性实施例中,应用多尺度基于hessian的滤波器以从前述csf-、灰质-和白质-掩盖的数据集中分割血管。
33.本公开的实施例涉及如下的方法:生成患者的海马、杏仁核以及其他皮质下结构的2d/3d解剖网格模型,以及用于生成从相同的高分辨率模板体积导出的这些解剖网格的标准化版本。
34.本公开的实施例涉及如下的方法:使用关于分割血管体积定义的损失函数和/或风险度量来确定用于将电极或穿透探针植入脑部的最佳轨迹。
35.本公开的实施例涉及脑脉管系统的2d/3d可视化的方法。在一些示例性实施例中,前述可视化将需要重建血管体积中的不连续。在一些示例性实施例中,这种可视化是使用最初为扩散张量成像开发的算法来实现的。在这样的示例性实施例中,数字图像强度调制被应用于血管体积,受3d空间中的特定方向梯度的约束,在一些实施例中,该特定方向梯度是使用基于hessian或张量的分解来执行的,以模拟3d成像体积中的各向异性扩散。这些数据集随后可以通过扩散张量成像工具箱进行处理,以建模和预测相似但不连续的成像特征之间的连接。例如,以这种方式,可以重新建模和可视化由于低信噪比或处理伪影而变得不连续的相似体素之间的可能连接(例如,针对3d成像体积中的血管)。例如,以这种方式,可以从不连续的数据集中重建连续的血管。
36.本公开的实施例涉及如下的方法:生成海马、杏仁核、丘脑、基底神经节和其他皮质下结构的拓扑准确的基于2d/3d表面的表示和/或解剖网格模型,以用于外科手术规划。还生成皮质区域的分区(parcellation),并且这些结构中的任何一个都可以相对于相邻结构和对侧结构独立地进行可视化和操纵。此外,使用基于群体的图谱和模板,还可以生成这些皮质下和/或其他深层结构的标准化表面模型,这将使得能够转化和应用最初为基于皮质的受试者间分析开发的并且显示出对准确性和结果的显著改进的基于表面的共同配准和分析技术。这些方法是对该领域的全新贡献,它将通过直接可视化或通过网格表面模型上的功能或电图数据的表示来提供在海马和/或其他皮质下区域病理学的建模或对海马/杏仁核或其他深部脑结构病理学的理解方面的显著改进,或用于电极或穿透探针或导管植入到这些区域的建模。
37.本公开的实施例涉及如下的方法:使用从受试者的对比加权t1mr成像获得的体积几何形状和变换矩阵将从机器人、机械或人类植入设备或过程获得的轨迹与受试者解剖t1 mr成像进行对齐。
38.本公开的实施例涉及如下的方法:使用自动分区技术以及线性和/或非线性变形算法来精确标识要植入或靶向的解剖目标,以将受试者脑部扭曲到标准模板空间,在该标准模板空间中目标是基于解剖结构预先定义的,反之亦然。
39.本公开的实施例涉及如下的方法:使用从先前植入的群体导出的先验概率分布来精确地标识要植入或靶向的解剖目标。
40.本发明的实施例涉及分配解剖目标,以激励使用深度电极的植入轨迹的无监督设计,该深度电极被放置用于标识由癫痫的特定符号学特征或癫痫的特性指示的癫痫。这可适用于放置激光探针、用于记录或用于调制的脑部电极、立体定向活检探针,使用解剖约束和先前植入病例经由轨迹将生物、细胞、遗传或化学材料注入脑部。
41.本公开的实施例涉及如下的方法:使用从整个群体中的先前激光消融体积导出的先验概率分布来生成预测消融体积(即,要受影响的海马组织的预期体积)的3d表面模型。这是对该领域的一项新贡献,它将改进后续激光消融或其他类似的基于导管的治疗的术前规划和知情轨迹建模。
42.本公开的实施例涉及用于标识涉及诸如运动、感觉、听觉或视觉过程之类的关键功能的白质通路(经由从扩散成像导出的确定性或概率性纤维束成像(deterministic or probabilistic tractography)标识的)和避免对该白质通路的损害的自动化技术。
43.本公开的实施例涉及如下的方法:使用植入后ct脑成像数据集的强度放大
(intensity-upscaling)和所得金属伪影的基于体积的聚类算法来自动分割和定位seeg电极。使用线性回归建模对来自机器人植入设备的并且先前与相同的成像空间对齐的轨迹进行拟合,以促进从噪声中标识金属电极伪影。线拟合模型使自动化方法能够解释电极位置的偏差。使用3d体积聚类搜索算法标识的伪影集群被迭代搜索,同时屏蔽不在当前感兴趣集群内的任何皮质区域,以确保可以解决重叠或合并的伪影。使用关于轨迹路径与所标识集群的轨迹之间的平行关系的信息,以及关于集群的质心的信息,可以将标识的集群与机器人轨迹对齐,以便一旦标识到足够数量的电极,就重新拟合轨迹。搜索算法的实时可视化使得能够出于信息和调试目的而并发更新集群搜索结果。
44.本公开的实施例涉及用于如下的方法:验证沿倾斜轨迹的多个立体定向深度探针的植入规划,这通过同时可视化由结构磁共振成像揭示的、沿着与建议轨迹共线的平面切片的表面拓扑和深层解剖结构的皮质网格模型来辅助。在任何给定平面上对脑部表面进行切片使得能够在3d中可视化深埋的皮质,并且还使得能够让临床医生快速确认外科手术规划。
45.本公开的实施例涉及如下的方法:操纵3d空间几何形状,以选择性地可视化沿任何平面的不同表面模型(例如,皮肤、颅骨、血管、脑部、海马、杏仁核等)或与所述沿任何平面的不同表面模型交互。可以选择性地沿任何平面遍历呈现表面。可以同样地沿着任何平面沿可视化表面或深入到可视化表面呈现分区或颅内eeg活动的可视化。
46.本公开的实施例涉及用于如下的方法:将颅内脑电图(iceeg)活动从基于表面的表示转换为dicom或3d数据集格式,dicom或3d数据集格式描绘了用户定义的受底层皮质带约束的感兴趣的激活,该底层皮质带反映了可能负责该激活的灰质区域。
47.本公开的实施例涉及用于执行经验源定位估计以对记录的iceeg数据的唯一神经发生器建模的方法。
48.使用本文公开的方法,利用模板匹配搜索在外科手术后成像中沿已知的规划轨迹自动地解析(resolve)植入的结构。这以自动化方式(例如,无需手动标识每个电极)为临床工作人员提供了所有植入材料的最终位置,并使得能够对外科手术精度进行严格测量。在具体应用中,本文公开的方法有助于避免在针对颞叶内侧癫痫的激光间质热治疗后出现视觉障碍。
49.图1显示了方法100的流程图,方法100用于对通过不同成像模态为受试者获得的脑成像扫描进行共同配准。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。方法100的操作可以由如本文所公开的计算系统来执行。
50.在框102中,获得受试者的脑部的一个或多个成像扫描。可以利用诸如磁共振成像序列(mri)、计算机断层扫描(ct)序列、脑磁图(meg)、正电子发射断层扫描(pet)或它们的任何组合的扫描模态来执行成像扫描。
51.在框104中,将成像扫描转换成文件格式/数据集,该文件格式/数据集可用于存储、分析和操纵被包含在成像扫描内的脑成像数据。例如,可以将成像扫描转换为nifti格式。
52.在框106中,将框104中产生的每个数据集作为输入提供给序列自适应多模态分割算法,以生成标记的分区和分割数据集。通常,分割算法通过将概率图谱与患者数据集对齐
来进行。在一个示例性实施例中,在给定体素的强度值的情况下,图谱有助于将特定脑部区域标签的概率分配给数据集的任何体素。在一个示例性实施例中,这可以通过使用贝叶斯分析来实现,其中图谱提供了属于特定组织类别的体素的先验概率。作为示例,该算法随后可以利用似然分布来定义给定脑部区域标签与该数据集的体素中的强度值分布之间的关系。术语组织类别可以指白质、灰质、脑脊液、脑肿瘤和/或其他脑部区域。本文使用的术语对齐可以指线性或非线性方法。针对脑部mri的序列自适应分割的分割算法的使用的示例参见例如:puonti o.、iglesias j.e.、van leemput k.(2013)fast,sequence adaptive parcellation of brain mr using parametric models(使用参数模型对脑部mr进行快速、序列自适应分区),在:mori k.、sakuma i.、sato y.、barillot c.、navab n.(eds(编者))medical image computing and computer-assisted intervention(医学图像计算和计算机辅助干预)
–
miccai 2013,miccai 2013,lecture notes in computer science(计算机科学讲义),第8149卷,springer,berlin,heidelberg(施普林格,柏林,海德堡),https://doi.org/10.1007/978-3-642-40811-3_91。测序算法针对不同成像模态的共同配准的应用在本领域中是未知的(例如,在mri和ct之间),并且在这里是一种新颖的应用。值得注意的是,应用该算法实现不同成像模态之间的快速、准确和稳健的共同配准(其示例性实施例可以是mri和ct成像扫描的共同配准)是对现有技术的显著改进。在标记数据集中,成像数据(成像数据的示例数据单元是1mm x 1mm x 1mm分辨率的3d像素(在本文中被称为体素)被根据所表示的颅外和颅内结构分配的数字标签替换。在各种实施例中,体素可以具有用户认为有用的任何尺寸。术语分区(parcellation)被用于指代标记的皮质区域,而术语分割(segmentation)指代标记的皮质下区域。在本公开中,这两个术语可互换地用于指代任何标记的皮质和皮质下区域。
53.在框108中,标记数据集被输入到共同配准算法,其中任何两个数据集与彼此的坐标空间对齐,并从中生成数学变换矩阵,该数学变换矩阵使该坐标变换能够被应用于共享该两个输入数据集中的任何一个输入数据集的体积几何形状的任何另一个数据集,以便将该另一个数据集对齐到第二个输入数据集的坐标空间。在一个示例性实施例中,变换矩阵可以是4x4矩阵m,该4x4矩阵m定义点p到另一点p'的线性、刚性和/或仿射变换,如方程p'=mp所定义的。在此示例中,点p使用包含体素的x,y,z坐标和数字1的列向量来定义数据集中一个体素的位置。例如,p=(x,y,z,1)。矩阵-向量积将来自矩阵m的向量列与来自列向量p的对应(x,y,z,1)值相乘。对标量向量积求和生成输出向量p':(x',y',z',1)。在这样的示例中,矩阵m的上部3x4元素可以包含实数,该实数用于存储被应用于p的平移、旋转、缩放和/或剪切(以及其他操作)的组合。此示例中的最后一行是(0 0 0 1)。可以使用多种神经成像分析软件中的一种或多种来生成这种形式的变换矩阵。使用带有分区/分割的标记数据集作为共同配准的输入,特别是在ct成像的情况下,克服了现有技术的许多限制(例如,与强度缩放差异或组织边界差异有关),并且即使存在解剖缺陷(例如脑卒中)、脑损伤(例如肿瘤)或其他成像伪影,也能生成可靠准确的共同配准。
54.在框110中,在框104中生成的数据集使用变换矩阵彼此对齐。
55.图2显示了根据本公开的用于生成皮质和皮质下脑部区域的表面模型的方法200的流程图。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。可以由如本文所
公开的计算系统在由方法100产生的标记数据集上执行方法200的操作。
56.由方法200生成的表面模型包括从群体级图谱导出的标准化网格模型,该标准化网格模型允许一个受试者表面上的任何点与另一受试者的表面上的相同点之间的点对点对应。
57.在框202中,将匹配感兴趣的皮质或皮质下区域的标记值的所有体素提取到仅包含那些感兴趣体素的新3d数据集中。例如,新数据集可以包括在方法100的分割处理期间标识的右海马。
58.在框204中,使用标准体积到表面的转换将在框202中形成的经分割的感兴趣的皮质或皮质下区域的3d数据集转换成表面网格模型。一般来说,标准体积到表面的转换可以使用现有的开源神经成像软件来实现。此类方法的一般和示例性实施例包括体积二值化,然后使用二值化值进行表面镶嵌以生成网格(例如,如由freesurfer提供的:https://surfer.nmr.mgh.harvard.edu/fswiki/mri_tessellate)或由开源血管建模工具包软件(vmtk:http://www.vmtk.org/vmtkscripts/vmtkmarchingcubes.html)提供的移动(marching)立方体算法。在一个示例性实施例中,表面/解剖网格模型可以被定义为3d空间中的点,这些点通过线连接以形成三角形,这些三角形中的每个三角形具有2d面并且根据特定的体积几何形状组合以形成所建模的对象的拓扑准确的表示。在一个示例性实施例中,表面/解剖网格模型可以是2d模型(例如,平面),该2d模型随后可以在3d空间中折叠以描绘3d对象(例如,脑表面)。
59.在框206中,计算所得表面模型的曲率和脑沟(sulcal)特征,所述曲率和脑沟特征随后被用于非线性地对齐表面模型的膨胀版本以匹配从标记的群体数据生成的相同区域的高分辨率图谱。在这种情况下,高分辨率图谱可以指皮质曲率数据的参考模板模式,在一些示例性实施例中,所述皮质曲率数据的参考模板模式先前被准备为从一组代表性受试者计算的平均模式,并被使得可用地作为标准存储库的一部分。在其他示例性实施例中,可以使用选定的受试者群体(例如,以某种方式操作的特定机构处的患者)来生成这样的模板数据。
60.在框208中,已经与图谱对齐的标准化表面网格被覆盖在受试者的原始表面模型上,并且该标准化表面网格的坐标被受试者的原生坐标空间的周围坐标的重新采样所替换。表面网格由空间中数千个被称为节点的点组成,这些点由线连接形成三角形,三角形的面形成表面模型的网格。在标准化表面的情况下,网格模型包含固定数量的节点并维护特定的节点到图谱区域对应关系(即,每个节点对应于图谱中的相同区域),并且这种对应关系可以跨受试者保留。为了保留对应关系,对于每个受试者,标准化表面网格和受试者自己的原始表面网格两者都以非线性方式变形,以与从前述高分辨率群体图谱导出的球形模板网格对齐。受试者和标准化网格两者都被扭曲,以最大化脑沟和曲率模式之间的重叠。一旦受试者和标准化表面网格两者都对齐到模板图谱,并因此彼此对齐,则为标准化表面网格的节点分配来自受试者的原始表面网格的周围节点的子集(其示例性实施例可以是4个最近的节点)的坐标的平均值。以这种方式,标准化表面被扭曲到受试者的解剖坐标空间,同时两者都对齐到模板,从而保留标准化表面与模板图谱的一对一对应关系。一旦从共同配准期间使用的球形配置放气,标准化表面网格就呈现受试者自身解剖结构的拓扑,同时继续维持其节点和解剖图谱身份之间的一对一对应关系。以这种方式,通过将特定节点与表
面之间的相同节点进行比较,可以跨受试者以高准确度水平执行基于表面的比较。
61.可以针对对侧半球区域重复方法200的操作,并且针对要生成的任何其他附加的皮质或皮质下或其他标记/分割或分区的脑表面重复方法200的操作。对于有关针对皮质表面生成标准化表面的信息,参见例如saad,z.s.,reynolds,r.c.,2012.suma,neuroimage(神经影像)62,768
–
773,http://dx.doi.org/10.1016/j.neuroimage.2011.09.016;kadipasaoglu cm,baboyan vg,conner cr,chen g,saad zs,tandon n,surface-based mixed effects multilevel analysis of grouped human electrocorticography(分组人体皮层电图的基于表面的混合效应多水平分析),neuroimage(神经影像)2014年11月1日;101:215-24.doi:10.1016/j.neuroimage.2014.07.006.epub2014年7月12日,pmid:25019677)。然而,尚无此类方法已知用于生成皮质下区域的标准化的基于表面的网格。此类区域的示例性实施例可以包括海马、杏仁核、丘脑核和基底神经节。这种表面模型可用于为个体解剖创建标准化皮质下表面,从而以前所未有的方式在个体之间实现这些皮质下结构的一致性。
62.将方法200用于常规上不被包括在基于表面的建模或分析中的脑部区域(例如海马和/或杏仁核和/或皮质下区域),并结合使用区域的高分辨率解剖图谱来使得能够生成标准化表面网格,这是对现有技术的重大改进,现有技术以前只将这种方法限制在皮质区域(例如,严格意义上的灰质或白质表面)。
63.图3显示了根据本公开的用于自动分割脑脉管系统以及生成基于2d/3d表面和体积的模型的方法300的流程图。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。方法200的操作可以由如本文所公开的计算系统来执行。
64.在框302中,获得受试者的脑部的一个或多个成像扫描。成像扫描包括对比加权mri扫描(例如,具有对比的t1加权mri,它将被称为对比mri数据集)。
65.在框304中,根据方法100将成像扫描从原始成像存储格式(例如dicom)转换为3d数据集。在转换期间,对比mri的强度值被可变地放大(例如100倍)以促进对比增强结构(例如血管)与其周围结构的区分。
66.在框306中,根据方法100,使用序列自适应多模态分割算法从对比mri生成标记数据集。
67.在框308中,来自如方法100中所描述地生成的用于对比mri数据集的标记数据集的掩模被用于子选择被标识为属于脑脊液(csf)区域的所有体素。csf掩模(子选择的体素)为血管分割算法提供了新的改进,因为代表血管的高强度体素最常位于csf中,与软脑膜表面相邻。对于那些被认为具有最大临床显著出血风险的血管(通常是具径≥1.5mm的血管)尤其如此。对于灰质和白质标记的区域也生成类似的掩模。
68.在框310中,被设计用于增强成像数据中的管状特征的多尺度滤波算法被用于从反映csf或背景噪声的相邻体素中提取血管。通常,滤波算法利用基于hessian的特征分解来在数据集的每个像素处以不同的空间尺度导出特征值和向量,以选择与不同直径的血管相对应的管状结构(参见例如:frangi,alejandro f.等人,multiscale vessel enhancement filtering(多尺度血管增强滤波),medical image computing and computer-assisted intervention(医学图像计算和计算机辅助干预)—miccai'98,
springer berlin heidelberg(施普林格,柏林,海德堡)1998.130-137)。软件算法返回输出,该输出向每个体素分配“血管”的权重,其范围例如从0到1,其中较高的权重表示具有更多类似血管的特征(例如管状)的体素。
69.在框312中,来自血管加权数据集的信息与对比mri数据集集成在一起,以通过非零体素的相对“血管”权重来加权非零体素的强度值,并惩罚与白质或灰质重叠的那些体素。
70.在框314中,使用框306中生成的变换矩阵将血管数据集与解剖mri数据集对齐(如方法100中所述的)。
71.在框316中,血管数据集被转换成表面解剖网格模型(如针对方法200的框204所描述的),该表面解剖网格模型可以使用不同水平的透明度和照明来可视化。
72.图4显示了根据本公开的用于可视化底层脑部结构的方法400的流程图。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。方法400的操作可以由如本文所公开的计算系统来执行。
73.在框402中,3d空间中的切割平面(例如,2d切割平面)在任何用户定义的轴上与3d体积或表面相交。在切割平面与给定表面网格模型或3d体积的相交处,切割平面的任一侧上的网格的所有部件可以被选择性地呈现为可见、不可见或半透明。在这个平面上,任何表面和/或体积(结构或功能)数据可以同时可视化。通常,可以通过沿着成像数据集的一个和/或多个2d解剖成像平面(其示例性实施例包括mri和/或ct扫描的冠状面、矢状面或轴向平面)定义切割平面来执行框402的操作。可以沿着任何任意几何形状(其示例性实施例可以包括正交和/或斜角)定义切割平面与成像数据集的相交,并且沿着这两个平面相交的点标识相关联的3d体积成像数据集的体素,该体素将用于进一步显示和/或分析。这些体素随后可以选择性地在受试者的3d表面模型旁边进行可视化。并且体素的坐标与3d表面模型的坐标的关系(例如,在它们的相交的点处)可以进一步用于选择性地使表面模型的部件在切割平面的任一侧上、或沿着切割平面本身可见、不可见或半透明。沿着切割平面的体素的坐标也可用于确定它们与受试者体内的植入电极的距离,该距离随后可用于计算和生成与切割平面相关的表面和/或体积数据表示。
74.在框402中,当应用于方法200和/或300中定义的颅外和颅内解剖网格时,可以计算与切割平面相交的表面或体积的定性和定量分析,包括但不限于计算形态特征,诸如皮质灰质/白质和/或皮质下结构的曲率、厚度和面积,以及海马和杏仁核曲率、厚度和面积。此外,相交的表面和/或体积的边缘可以选择性地升高或降低以提高可视化的精度。在一个示例性实施例中,切割平面与3d表面的特定元素的相交可以包括各种皮质和/或皮质下表面层,其示例性实施例包括软脑膜和/或白质表面。对于这些示例性实施例,切割平面与这些表面的相交将确定这两个示例性表面之间的中间灰质。中间灰质可以另外称为皮质带。并且通过计算软脑膜和白质表面沿着它们与切割平面相交所位于的点之间的距离(例如,这两个表面在它们与切割平面相交处的正交距离),可以计算皮质带的厚度。通过跨皮质带的长度对厚度进行积分,可以计算出面积。在另一示例性实施例中,可以通过从表面网格三角形的面向外绘制正交线以确定这些线是否与另一网格三角形的面相交,来计算表面(例如,软脑膜表面网格)的曲率。当两个三角形面指向彼此时,发生这种相交,就像脑沟的情况
一样。使用此类相交的角度和距离,随后可以确定局部拓扑特征,诸如表面曲率和脑沟边界。
75.在框404中,当应用于如方法200和/或300中定义的颅外和颅内解剖网格时,可以选择性地相对于各种解剖网格模型的切割平面描绘脑结构数据(包括mri、ct、pet、fmri、dti中的一者或多者)和/或脑活动数据(包括eeg或meg或脑刺激中的一者或多者)的可视化。
76.在框406中,当应用于方法200和/或300中定义的颅外和颅内解剖网时,用户可以通过选择沿表面的路径以及在表面内应用切割的深度,来进行任意形状或几何形状(例如圆顶形表面或匹配开颅手术的表面)的虚拟切割,以这种方式用户可以对外科手术入路(approach)或各种解剖边界进行建模和可视化,以进行临床评估和/或外科手术规划或训练和/或教育可视化。
77.图5显示了根据本公开的用于自动规划电极或探针植入的方法500的流程图。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。方法500的操作可以由如本文所公开的计算系统来执行。
78.方法500使用从先前植入到要植入或靶向的解剖目标的群体导出的先验概率分布来提供电极或穿透探针植入轨迹的精确和自动规划。先验概率分布是使用来自先前植入的群体的轨迹的入口和/或目标坐标生成的,所述轨迹的入口和/或目标坐标已经使用线性或非线性变形算法被对齐到受试者的脑部(反之亦然)。此外,通常的植入策略是使用对与受试者的癫痫发作症状学或癫痫的其他电临床特性相关的临床电综合征的描述从可能的解剖区域的临床考虑导出的。在每种情况下,轨迹将具有附加的目标,即通过使用损失函数和风险度量来避开关键结构(例如血管)。附加地,在一个实施例中,可以由立体定向领域的内科医生或外科医生通过定义感兴趣的入口点和目标点来单独地创建这些轨迹。
79.在框502中,获得受试者的脑部的一个或多个成像扫描。成像扫描包括目标解剖mri扫描(例如,没有对比的t1加权mri)和对比加权扫描(例如,具有对比的t1加权mri)。
80.在框504中,根据方法100将成像扫描从原始成像存储格式(例如dicom)转换为数据集。没有对比的t1加权mri被转换为称为解剖mri数据集的数据集,并且具有对比的t1加权mri被转换为称为对比mri数据集的数据集。
81.在框506中,根据方法100,血管数据集和网格模型被生成并被共同配准到解剖mri数据集及其相关的网格模型。
82.在框508中,使用从先前植入受试者的群体群组中策划的目标点和入口点坐标来定义当前受试者自己的解剖空间中的预测入口和目标点坐标。来自群体的坐标先前被共同配准到高分辨率模板图谱。在一个示例性实施例中,模板坐标空间可以是被定义为标准坐标空间(例如,talairach空间;蒙特利尔神经学研究所空间)中的坐标空间。共同配准可以使用非线性或线性/刚性/仿射变换来实现,并以逆一致和对称方式计算,使得模板坐标可以以拓扑准确的方式被变换到患者的坐标空间并且可以在植入当前受试者的电极后应用反向变换,以进一步添加到群体先验数据集。
83.在框510中,针对每个探针,对该探针的入口和目标点坐标群组进行平均,以在受试者的解剖坐标系中生成平均目标和入口点,根据该平均目标和入口点定义平均轨迹。对
于每个探针,解剖分区进一步与探针相关联,并可用于在以下示例性情况下进一步约束预测轨迹:感兴趣的解剖区域体积较小和/或紧邻其他敏感解剖结构,和/或来自先前群体的目标坐标分布的可变性可大于结构的直径。以这种方式,在一个示例性实施例中,解剖分区和先前植入的轨迹分布可用于产生先前信息以使得能够植入穿透探针。在另一示例性实施例中,解剖目标可能非常大(例如,如在扣带回中,它以c形从颅骨的前部延伸到后部),并且在这种情况下,来自先前的群体目标坐标可将期望的目标位置限制在扣带的前部、中部或后部(此处的示例轨迹为ac=前扣带;mc=中扣带;pc=后扣带),同时解剖分区可进一步限制最终目标坐标以保持在扣带的边界内,已知扣带沿着它的路线从下向上弯曲并返回向下,以及从前向后弯曲并返回。在进一步的示例性实施例中,本领域的临床医生可以使用患者的癫痫发作症状学来导出关于可能导致癫痫的特定解剖区域的信息。这种理解随后可以通过将轨迹约束到感兴趣的解剖分区,被转化为通知轨迹规划。在另一实施例中,可以由立体定向领域的技术人员通过定义感兴趣的入口和目标点,并相对于血管和其他可能的轨迹优化这些,来单独地手动创建外科手术轨迹。替代地,它们可以通过从基于群体的平均轨迹的导出与手动优化的某个组合来导出。
84.在框512中,可以通过调整轨迹使得它与最近的体素相交来实现对解剖分区的约束,该最近的体素具有从感兴趣的解剖区域分配的标签,其中通过计算探针轨迹的体素与感兴趣的解剖分区中的标记体素之间的欧几里得距离来确定距离。
85.在框514中,轨迹与任何关键结构(诸如血管)的相交是使用损失函数通过以下方式来评估的:确定与被标记或标识为属于关键结构的2d和/或3d表面和/或体积区域的此类轨迹相交,并对任何此类相交的轨迹进行惩罚。此外,相对于用户确定的约束条件(例如,距血管的边缘》2mm,或距相邻探针的中心≥4mm)检查该轨迹与诸如血管等关键结构的接近程度。
86.自动丢失或优化功能也可以结合到轨迹规划中,使得—在一个示例性实施例中—总颅内长度被最小化,同时所采样的灰质被最大化以实现最大的记录潜力。
87.在框516中,从由先验信息估计的初始轨迹(由跨群体的平均进入点和目标点定义)开始,方法500开始围绕该平均点进行局部搜索,直到尽可能接近平均轨迹并且满足所有安全和优化标准的轨迹被标识。搜索区域被定义为平截头体,该平截头体的每个端部的直径根据目标分布的标准偏差定义,并且每个端部的中心由来自群组群体的平均入口和目标坐标定义。
88.在块518中,将最终轨迹叠加在解剖mri数据集上以生成新的规划数据集,该新的规划数据集可以以任何方式导出,以供与其他软件或硬件系统一起使用,以相对于受试者的解剖结构可视化轨迹规划。
89.当与方法400的可视化技术一起使用时,验证沿倾斜轨迹的多个立体定向深度探针的植入规划是通过同时可视化由结构磁共振成像揭示的、沿着与建议轨迹共线的平面切片的表面拓扑和深层解剖结构的皮质网格模型来辅助的。在任何给定平面上对脑部表面进行切片使得能够在3d中可视化深埋的皮质,并且还使得能够让临床医生快速确认外科手术规划。
90.方法500的规划操作与方法100-400的解剖可视化和分析技术相结合,使临床医生能够标识关键的颅外和颅内结构(包括但不限于诸如心室、白质通路、血管和功能区之类的
结构)并且避免不希望的医源性结果,包括但不限于出血和/或视觉、语言、认知、时空和/或感觉运动缺陷。
91.将方法100-500与使用确定性或概率性纤维束成像(从扩散成像导出的)的白质通路分析相结合,可以进一步标识涉及关键功能(诸如运动、感觉、听觉或视觉过程)的通路的风险。在特定的适应症中—这种方法可用于减少针对颞叶内侧癫痫的海马和/或杏仁核激光间质热治疗后的视力障碍。用于靶向颞叶内侧的最佳轨迹的3d规划,结合由扩散成像标识的路径的可视化,可用于增加该技术的治疗窗口。
92.图6显示了用于自动定位、命名和可视化先前植入的电极或穿透脑探针,以及使用模板匹配搜索算法和规划轨迹在外科手术后成像中解析植入的结构的方法600的流程图。尽管为方便起见按顺序描绘,但所示出的动作中的至少一些可以以不同的顺序执行和/或并行执行。附加地,一些实现可以只执行所示的动作中的一些。方法600的操作可以由如本文所公开的计算系统来执行。
93.在框602中,获得受试者的脑部的一个或多个成像扫描。成像扫描包括目标解剖成像扫描(例如,没有对比的t1加权mri),以及植入电极后获得的植入后ct成像扫描,用于定位每个电极的实际位置。
94.在框604中,根据方法100将成像扫描从原始成像存储格式(例如dicom)转换为据集。没有对比的t1加权mri被转换为称为解剖mri数据集的数据集,并且ct成像扫描被转换为称为ct电极数据集的数据集。
95.在框606中,两个数据集被共同配准,并且根据方法100将ct电极数据集对齐到解剖mri。
96.在框608中,获得第三成像扫描。第三成像扫描实际上被外科医生在外科手术期间用作解剖成像数据集以指导电极植入(在本文被称为植入mri数据集或成像扫描)。在一个示例性实施例中,该扫描可以是具有对比增强的t1加权mri,用于提供高分辨率解剖细节和在植入规划期间揭示血管的位置。根据方法100,植入mri成像扫描被导入、共同配准并对齐到解剖mri。
97.在框610中,获得轨迹植入数据文件(在本文称为植入日志)。植入日志是在执行植入时创建的,其示例性实施例是由机器人seeg植入系统(例如zimmer rosa
tm
机器人)生成的受试者的植入文件,并且另一示例是由导航系统(例如,brainlab
tm
和美敦力stealth
tm
)创建的立体定向文件。植入日志包括关于探针/轨迹名称和/或规划目标和/或进入点坐标和/或相对于植入mri的患者坐标空间定义的探针轨迹矢量的信息(如方法500中所述的)。
98.方法500还可以包括安全性/手动验证特征,由此要求用户手动输探针名称、每个探针上的电极的数量、以及要从每个探针忽略的电极(例如,对于锚栓中的电极、在脑部之外的电极、或不被包括在记录中的电极,等等)的数量。可以通过直接从植入日志或其等效物(如果可用)读取前述信息,自动获得每个探针的名称和估计电极的初始列表并将该初始列表作为模板提供给用户。
99.在框612中,来自植入日志的针对每个探针提供的规划目标和入口点坐标,连同如由用户验证的每个探针中的电极的数量,被用于计算每个电极的预期坐标的初始列表。使用从入口和目标点坐标计算的轨迹的轴、入口与目标点坐标之间的距离、以及电极之间的间距来执行该计算。该信息被用于针对探针轨迹中的每一个探针轨迹在每个电极的估计位
置处生成“虚拟”对象。这种“虚拟”对象的示例性实施例可以是以具有与电极几何形状相匹配的给定几何形状的坐标为中心的球体(例如圆柱体)。该新数据集(在本文被称为规划轨迹数据集)具有与植入mri数据集相同的体积几何形状和坐标空间。
100.在框614中,使用通过将植入mri数据集对齐到解剖mri数据集而生成的变换矩阵将规划轨迹数据集对齐到解剖mri数据集。
101.在框616中,使用ct电极和规划轨迹数据集根据方法100被共同配准到受试者的解剖mri数据集,并且对ct电极数据集执行二值化操作,其中低于自动确定的阈值水平的成像体素(例如,可能包含来自图像的强度信息的1mm x1mm x 1mm立方体尺寸,用作等效的3d像素)被归零。将3d聚类算法应用于剩余体素,以标识在ct扫描上具有电极触点的高强度信号(有时被称为金属伪影)的体素。3d聚类算法的示例性实施例可以是由使用的底层神经成像分析软件提供的标准聚类命令。通过调整阈值执行迭代搜索,直到得到的集群的数量与预期的电极数相似。这些集群的坐标迭代地与为规划轨迹数据集生成的球形“虚拟”电极的坐标进行比较。使用3d空间中的线距离和用于距离度量的质心,来自ct电极数据集的集群以及来自规划轨迹数据集的轨迹路径和球形对象坐标被迭代搜索和优化,直到所有预期的电极都被标识和定位。
102.在框618中,聚类算法与轨迹路径信息和预期的电极数量(如由输入日志提供并在规划轨迹数据集中表示的)相结合,被用于调整电极坐标的最终位置。因此导出与成像数据最匹配的最终坐标位置(例如集群位置),以及预期轨迹的物理约束(沿与同一路径上的相邻电极隔开特定距离的特定线的位置)。
103.在框620中,在所有电极坐标被标识之后,这些电极的2d和/或3d模型被呈现以用于可视化,其中分配了适当的电极名称和编号方案。使用可显示对象(例如圆柱体或圆盘)对电极进行可视化,这些可显示对象反映了每个实际电极的大小、间距和尺寸。在这些电极已经被共同配准到解剖mri数据集的情况下,可以相对于由方法200和/或300生成的相关颅外和颅内结构的基于2d和/或3d表面和体积的表示对这些电极进行可视化。
104.可显示的电极对象可以被单独操纵(例如,着色、注释、编号、使用不同的形状或表示可视化、打开或关闭)。它们可以与由电极收集的任何功能数据(eeg)一起被呈现为透明、半透明或不可见。
105.本文所述的方法和技术可以与其他方法结合使用,以用于对所记录的颅内eeg或使用植入电极和/或穿透探针和/或成像模态测量的其他一般功能激活或一般神经相关性的基于表面的表示。本文公开的用于基于表面的表示的方法不仅可以应用于显示皮质结构上的表示,还可以应用于为海马、杏仁核和/或其他一般皮质下或脑结构生成的解剖网格。此类方法公开于美国专利第10,149,618号中。
106.使用本文公开的方法,感兴趣的数据表示可以被限制到特定电极并通过将感兴趣的体素的强度值叠加在解剖mri数据集上以生成新的表面或体积激活数据集来导出到新的数据集。在基于表面的数据集中,使用测地线扩散函数将激活分配给表面节点,如在先前出版物(kadipasaoglu cm,baboyan vg,conner cr,chen g,saad zs,tandon n,surface-based mixed effects multilevel analysis of grouped human electrocorticography(分组人类皮层电图的基于表面的混合效应多水平分析),neuroimage(神经影像),2014年11月1日;101:215-24.doi:10.1016/j.neuroimage.2014.07.006.epub 2014年7月12日,
pmid:25019677)中所描述的。在基于体积的数据集中,激活被限制到位于感兴趣电极下方的软脑膜和白质表面层(皮质带)之间的边界内的体素(christopher r.conner,gang chen,thomas a.pieters,nitin tandon,category specific spatial dissociations of parallel processes underlying visual naming,cerebral cortex(视觉命名背后的并行过程的类别特定空间分离),cerebral cortex(脑皮质),第24卷,第10期,2014年10月,第2741-2750页,https://doi.org/10.1093/cercor/bht130)。这些数据集可以以任何方式被导出到磁盘,以便与其他软件或硬件系统一起使用,以相对于受试者的解剖结构可视化这些激活。
107.图7显示了根据本公开的对单个受试者执行的不同神经成像模态的共同配准的图形表示。在图7中,将序列自适应分割应用于数据集702以产生标记数据集706,并且将序列自适应分割应用于数据集704以产生标记数据集708。标记数据集706和708被共同配准,并且通过共同配准产生的变换矩阵被应用于以对齐标记数据集706和708,如数据集710中所示。
108.图8显示了根据本公开的描绘海马以及丘脑的2d/3d表面模型的生成的图形表示。图8a是从图8b中所示的对象解剖t1 mri的3d体积数据集的分割生成的右海马的解剖网格模型的示例性图示。
109.图8b和图8c描绘了受试者的左海马和杏仁核的2d/3d表面网格模型的示例性图示,在基于解剖图谱的分区之后,这些示例性图示与同一受试者的右侧脑半球被同时可视化。在图8c中,表面模型被可视化为不同的结构。左侧皮质半球已独立于右侧呈现透明,以允许左海马和杏仁核的可视化。在图8d中,分区的右侧皮质半球呈现为半透明的,使得底层右海马和杏仁核的固态呈现可以被可视化。
110.图8e和图8f示出了使用从显微立体定向图谱导出的分区生成的受试者的丘脑及其细胞核的示例性基于表面的网格模型。在图8e中,表面模型是孤立的视图。在图8f中,与受试者的原始解剖t1 mri的三个主平面相关地查看同一模型。
111.图9a-图9d显示了根据本公开的分割人类脑脉管系统的示例步骤。图9a-图9c描绘了原始成像数据集(图9a,在本文中原始成像数据集的示例性实施例是具有对比度的t1 mri),该原始成像数据集随后被脑脊液分割体积(图9b)掩盖,并且随后使用多尺度的基于hessian的滤波算法进行处理以准确地分割血管体素(图9c)。图9d描绘了使用分割的血管体积(右)以及表面脑脉管系统模型(轮廓)在原始对比t1 mri数据集的三个主平面上的叠加生成的所得血管3d表面模型,展示了对受试者的脉管系统的全面分割。
112.图10a-图10w显示了使用2d切割平面(“切片器”)来以用于优化皮质和皮质下结构和/或功能表示的可视化的任意角度与2d和/或3d表面和体积模型相交的图形表示。图10a-图10c描绘了在与图10a中所示的ct颅骨重叠的受试者的解剖t1加权mri的2d矢状平面视图上观察到的切割平面。在图10b中显示了受试者的完整颅骨的3d表面模型,并且在图10c中显示了应用切割平面后的颅骨。颅骨呈现为部分透明,以可视化应用相同切割平面的底层分区皮质表面模型。
113.图10d-图10f显示了相同受试者颅骨和底层分区皮质表面模型的旋转视图。请注意,可以将切割平面呈现为不透明并限制在3d表面模型的边界内,以显示相关联的2d mri平面图像(图10d)。替代地,可以将切割平面呈现为半透明和/或将2d mri平面视图延伸到
底层表面模型的边界之外(图10e)。最后,可以将切割平面呈现为不可见,并且将表面模型的底层平面呈现为透明,使得可以使深层解剖结构可视化(图10f)。
114.图10g、图10h和图10i显示了2d切割平面和相关联的3d分区皮质表面模型在各种旋转角度下的矢状视图。在图10i中,皮质模型的边缘略微延伸到切割平面的边界之外,其中脑回和脑沟边界被选择地增强以更精确地可视化底层的解剖特征。
115.图10j-图10l显示了图10g-图10i中所示的相同2d矢状切割平面和3d皮质表面模型的三个视图,其中模型的边缘从切割平面缩回(图10j),与平面齐平(图10k),以及稍微超出平面之外(图10l)。
116.图10m、图10n和图10p显示了2d冠状切割平面和3d皮肤和分割分区皮质表面模型的三个视图。完整的皮肤模型与切割平面相交,并且皮肤的剩余部分和分区皮质模型被可视化(图10m)。在图10n中单独地并参考切割平面显示分区皮质模型,其中边缘略微延伸超出平面之外,并且随后再次在第三视图中,但在该视图中,边缘被限制为仅灰质和白质边界,使得灰质和白质边界边缘的超出切割平面之外的延伸将隔离中间皮质带。在图10p中,描绘了来自图10n的第三图像的放大和略微旋转的视图,其中白色箭头指示被包含在灰质与白质边界的边缘之间的前述皮质带的示例性区域(图10p)
117.图10q-图10w经由沿着与深度轨迹共线的平面的切片显示了具有表面和深层解剖结构的同时表示的皮质以及被表示为色标(color scale)的皮质活动。脑结构数据(包括mri、ct、pet、fmri、dti中的一者或多者)和/或脑活动数据(包括eeg或meg或脑刺激中的一者或多者)相对于各种解剖网格模型的切割平面的可视化可以被选择性地描绘,以优化新皮质(图10q、图10r、图10s、图10t和图10u)和/或海马和杏仁核(图10v和图10w)和/或皮质下或其他脑部区域中的功能活动的可视化。切割平面和相关表面可视化的相关视点(图10t-图10v)分别由线1002和箭头1004描绘。
118.图11a-图11r显示了用于电极或穿透探针植入的群体导出的解剖靶向的图形表示,其结合了使用来自先前植入的群体的概率分布和/或基于解剖图谱的分区和分割导出的先验。图11a-图11d描绘了来自130名植入了2600个电极以探测癫痫的患者进入脑部的轨迹的分组表示,这些分组表示已被共同配准并对齐到共同的脑空间,并通过入口和目标点进行颜色编码(图11a)。电极可以基于应用于它们的标准区域命名法进一步进行颜色编码,从而指示个体间特定皮质或皮质下病灶的相似入口和目标点,其示例性实施例针对单个受试者的右侧杏仁核和海马进行了描绘(图11b)。使用来自该群体的先前轨迹的信息,可以为新个体(不是先前130名患者中的一个)的任何特定脑部区域导出新轨迹。为单个受试者的右前海马(rah)提供了分析的示例性图示,其中新轨迹被描绘为细长圆柱体,而使用每个单独的探针(图11c,较短的圆柱体)或通过可视化该群体的均值和方差(图11d)来描绘群体先验轨迹,在此示例性图示中利用平截头体对该群体的均值和方差进行了描绘,该平截头体使用入口和目标点坐标的均值和1.5倍的标准偏差。
119.图11e描绘了倾斜切割平面、详细的脑脉管系统和分区解剖网格模型、以及用于生成用于12个不同的脑探针(例如seeg探针)的自动植入轨迹规划的轨迹规划算法的集成。自动化算法确保遵守多个安全性约束,该安全性约束的示例性实施例可以是与沿轨迹的相邻血管以及与相邻探针的最小距离。面板11e-2描绘了手动轨迹优化的示例性图示,其中两个圆柱体被可视化,从而表示右前海马(rah)探针的原始(即自动导出的)和手动调整的轨迹。
120.图11f描绘了用于针对颞叶内侧癫痫的杏仁核和/或海马的激光间质热治疗的相似群体水平导出规划。被可视化的是新受试者的最佳新轨迹,以及针对给定轨迹预期的群体导出的预测消融量。
121.图11g和图11h描绘了从针对左扣带回中的多个区域的先前植入轨迹的群体数据导出的新轨迹的示例性图示,所述左扣带回中的多个区域包括左喙扣带(left rostral cingulate,lrc)、左前扣带(left anterior cingulate,lac)、左内侧扣带(left medial cingulate,lmc)和左后扣带(left posterior cingulate,lpc)区域。这些图示包括突出显示入口点的侧视图(图11g)和描绘由前述目标脑部区域标记的建议轨迹的内侧视图,其中左半球已被呈现为完全透明,使得右半球的扣带回是可见的(并且可用作对侧目标脑部区域的视觉参考),并且其中建议轨迹利用被呈现为半透明覆盖的其相关联的平截头体(从群体导出的)被描绘(图11h)。图11j-图11p使用3d皮质表面模型的上视图(图11j
–
图11l)和侧视图(11m-11p)两者描绘了接受难治性癫痫的立体脑成像评估的受试者可能期望的示例性建议轨迹的另一子集的示例性图示,其中左半球被呈现为不透明(11j和11m)或完全透明(11k-11l和11n-11p)。中间的图示描绘了用于生成它们相应的新轨迹的先前植入轨迹的群体数据,使用由目标脑部区域颜色编码的圆柱体来可视化与它们相应的新轨迹重叠在一起的先前植入的探针中的每一个(图11k和图11n)。使用先前植入轨迹的群体的坐标分布的均值和1.5倍标准偏差来生成前述平截头体,该平截头体在最右侧的图示中被描绘为具有它们相应的轨迹的半透明覆盖(11l和11p)。底行描绘了来自先前植入的群体数据的所有轨迹的示例性总结图示,所述所有轨迹用它们相应的平截头体在已被呈现为不透明和完全透明的单个示例性受试者的3d皮质表面模型上进行可视化(分别为11q和11r)。
122.图12a-图12e描绘了自动电极定位和标记的图形表示,该图形表示并入了来自机器人seeg植入系统的植入轨迹日志,以约束和通知电极搜索算法,并提供探针名称和相关联的电极的数量。在12a中描绘了应用于植入后ct电极数据集的初始聚类算法,展示了如何使用用于对具有低于阈值的强度的体素进行清零的增大强度阈值来标识表示来自ct扫描仪中的电极触点的伪影的高强度体素的集群。来自机器人植入系统的轨迹植入日志也可以用于通过将算法的搜索空间限制为更有效地将与电极伪影相关的信号与噪声分离来进一步告知电极搜索(图12b),并且还确保最终电极坐标以与如由球形虚拟电极定义的实际植入相一致的方式被间隔开并对齐(图12c)。
123.图12d描绘了切割平面以倾斜角度应用到受试者的颅骨模型以相对于受试者右海马和杏仁核表面模型可视化植入的电极。在该示例性实施例中,每个电极被呈现为具有由植入轨迹日志和实际电极的物理尺寸决定的电极间间距和尺寸的圆柱体。通过探针名称探针及其相应的电极进行颜色编码。图12e中描绘了同一受试者的右海马和杏仁核的更缩小的视图,其中植入探针的子集被可视化为可显示的对象并通过探针名称被颜色编码,该探针名称也以白色被注释。来自轨迹植入日志的轨迹这次还在此被描绘为具有较小尺寸和间距的半透明圆柱体,以使它们自身与真实的电极位置区分开。如通过具有覆盖的十字架的突出显示的电极可以看出的,最终电极坐标并不总是与规划的轨迹完全对应,因为探针在植入期间可能偏转。突出显示的电极坐标与同一受试者的覆盖有植入后ct的植入前mri的相邻2d冠状和矢状平面图像中的十字架的坐标相对应。
124.图13显示了适用于本文公开的方法(例如,方法100、200、300、400、500和/或600)的实现的计算系统1300的框图。计算系统1300包括一个或多个计算节点1302和辅助存储1316,计算节点1302和辅助存储1316是通信耦合的(例如,经由网络1318)。可以应用计算节点1302中的一个或多个以及相关联的辅助存储1316来执行本文所述的方法的操作。
125.每个计算节点1302包括一个或多个处理器1304,处理器1304耦合到存储器1306、网络接口1312和i/o设备1314。在各种实施例中,计算节点1302可以是包括一个处理器1304的单处理器系统,或包括若干个处理器1304(例如,两个、四个,八个或另一合适的数字)的多处理器系统。处理器1304可以是能够执行指令的任何合适的处理器。例如,在各种实施例中,处理器1304可以是实现各种指令集架构(isa)中的任何指令集架构的通用或嵌入式微处理器、图形处理单元(gpu)或数字信号处理器(dsp)。在多处理器系统中,处理器1304中的每一个可通常(但不一定)实现同一isa。
126.存储器1306可以包括被配置为存储由(多个)处理器1304可访问的程序指令1308和/或数据1310的非瞬态计算机可读存储介质。可以使用任何合适的存储器技术来实现存储器1306,诸如静态随机存取存储器(sram),同步动态ram(sdram),非易失性/闪存型存储器或任何其他类型的存储器。实现本文公开的功能的程序指令1308和数据1310被存储在存储器1306中。例如,指令1308可以包括当由(多个)处理器1304执行时实现本文公开的方法中的一个或多个方法的指令。
127.辅助存储1316可包括易失性或非易失性存储和存储设备,以用于存储信息,诸如,如本文所述的用于实现本文描述的方法的程序指令和/或数据。辅助存储1316可以包括经由网络接口1312由计算节点1302可访问的各种类型的计算机可读介质。计算机可读介质可包括存储介质或存储器介质,诸如半导体存储、磁性或光学介质,例如磁盘或cd/dvd-rom或其他存储技术。
128.网络接口1312包括被配置为允许数据在计算节点1302和/或耦合到网络1318的其他设备之间交换的电路系统。例如,可以将网络接口1312配置为允许数据在计算系统1300的第一实例和计算系统1300的第二实例之间交换。网络接口1312可以支持经由有线或无线数据网络进行通信。
129.i/o设备1314允许计算节点1302与各种输入/输出设备(诸如一个或多个显示终端、键盘(keyboard)、小键盘(keypad)、触摸板、扫描设备、语音或光学识别设备、或适合用于通过一个或多个计算节点1302输入或检取数据的任何其他设备)进行通信。计算系统1300中可存在多个输入/输出设备。
130.计算系统1300仅是说明性的,并不旨在限制实施例的范围。特别是,计算系统1300可包括可以执行本文公开的功能的硬件或软件的任何组合。在一些实施例中,计算节点1302也可以被连接到未示出的其他设备。另外,在一些实施例中,由示出的部件提供的功能可以被组合在较少的部件中或分布在附加的部件中。类似的,在一些实施例中,可以不提供所示出的部件中的一些部件的功能和/或其他附加功能可以是可用的。
131.以上讨论旨在说明本发明的原理和各实施例。一旦完全领会了以上公开,则众多的变型和修改对本领域内技术人员而言将变得显而易见。所附权利要求旨在被解释为包括所有此类变型和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1