具有多体相互作用和全对全连接的超级伊辛仿真器
具有多体相互作用和全对全连接的超级伊辛仿真器
1.交叉引用相关申请
2.本技术要求2020年5月13日在美国专利商标局提交的美国临时专利申请号63/024,257的优先权和权益,其全部内容通过引用结合于此。
技术领域
3.本公开的实施例的各方面通常涉及用于解决组合优化问题的处理系统及其使用方法。
4.发明背景
5.光子系统目前正用于寻找复杂系统的近似基态,例如,具有时间复用脉冲的光纤环形光学参量振荡器腔中的快速相干伊辛机,尽管其具有有限的自旋数或依赖于光电检测和电子反馈来模拟自旋间相互作用。此外,基于空间光调制的线性光学伊辛机通过将其编码为空间光调制器(slm)上的像素的二进制相位,被显示为对着大约80,000个自旋。但是,该机器仅限于两体相互作用。然而,有一些物理系统和数值模型的动力学不能被两体相互作用完全捕获,需要对多体相互作用进行适当的描述,例如,k-sat(k-可满足性)问题。这提出了一个重大的计算挑战,其复杂性和体积远远超过只有两体相互作用的伊辛问题,即使对于中等数量的自旋也是如此。
6.
背景技术:
部分中公开的上述信息仅用于增强对本公开的理解,因此其可能包含不构成本领域普通技术人员已知的现有技术的信息。
技术实现要素:
7.本公开的实施例的各方面涉及用于仿真伊辛机并且能够同时支持高连通性、多体相互作用和大量自旋的系统和方法。
8.根据本发明的一些实施例,提供了一种光学计算系统,包括:光源,被配置为产生泵浦光束;光学调制器,被配置为接收调制掩模并基于调制掩模调制泵浦光束,以生成调制光束;非线性介质,被配置为将调制光束的一部分转换为二次谐波(sh)光束并产生包括sh光束和泵浦光束的未转换部分的输出;以及分色镜,被配置为接收非线性介质的输出并将sh光束和泵浦光束的未转换部分去耦合;检测器,被配置为检测泵浦光束的未转换部分的第一光功率,并检测sh光束的第二光功率;以及控制器,被配置为基于第一和第二光功率生成更新调制掩模,以传输到光学调制器。
9.在一些实施例中,光学调制器包括空间光调制器,空间光调制器被配置为调制泵浦光束的小波的相位,以生成调制光束。
10.在一些实施例中,调制掩模是随机二进制相位图案。
11.在一些实施例中,空间光调制器被配置为通过基于调制掩模将小波中的每一个的相位编码为第一相位或第二相位,来调制泵浦光束的小波的相位,并且第一和第二相位相差180度。
12.在一些实施例中,光学调制器包括数字微镜器件,数字微镜器件被配置为调制泵
浦光束的小波的强度,以生成调制光束。
13.在一些实施例中,光学计算系统进一步包括:第一透镜,被配置为将调制光束聚焦在非线性介质内部;以及第二透镜,被配置为将非线性介质的输出准直到分色镜上。
14.在一些实施例中,检测器包括:第一光电检测器,被配置为检测泵浦光束的未转换部分的第一光功率;以及第二光电检测器,被配置为检测sh光束的第二光功率,并且其中,非线性介质包括周期极化铌酸锂晶体。
15.在一些实施例中,调制掩模包括多个像素,并且控制器被配置为基于第一和第二光功率来识别像素簇,并且通过反转像素簇的像素来生成更新调制掩模。
16.根据本发明的一些实施例,提供了一种控制光学计算系统以确定系统能量的近似基态的方法,该方法包括:驱动光源,以生成泵浦光束;生成相位掩模;将相位掩模应用于空间光调制器,以调制泵浦光束的小波的相位,从而基于相位掩模生成调制光束;以及从检测器接收泵浦光束的第一光功率和基于泵浦光束生成的二次谐波(sh)光束的第二光功率,其中,生成相位掩模包括:识别相位掩模的簇;基于第一光功率确定当前系统能量;至少基于系统能量和先前最小系统能量来确定是否更新相位掩模;以及响应于确定更新相位掩模,基于相位掩模的簇更新相位掩模。
17.在一些实施例中,生成相位掩模进一步包括:响应于确定不更新相位掩模,将当前系统能量和先前最小系统能量中的较小者识别为近似基态。
18.在一些实施例中,生成相位掩模进一步包括:识别热能;基于当前系统能量和先前最小系统能量计算系统能量的变化;以及基于系统能量的变化和热能确定玻尔兹曼概率,确定是否更新相位掩模进一步基于玻尔兹曼概率。
19.在一些实施例中,确定是否更新相位掩模包括:确定反馈迭代计数小于阈值;确定更新相位掩模。
20.根据本发明的一些实施例,提供了一种光学计算系统,包括:光源,被配置为产生泵浦光束;光学调制器,被配置为接收调制掩模并基于调制掩模调制泵浦光束,以生成调制光束;非线性介质,被配置为将调制光束的一部分转换为二次谐波(sh)光束并产生包括sh光束和泵浦光束的未转换部分的输出;以及分色镜,被配置为接收非线性介质的输出并将sh光束和泵浦光束的未转换部分去耦合;第一相机,被配置为捕获泵浦光束的未转换部分并生成第一强度矩阵;第二相机,被配置为捕获泵浦光束的未转换部分并生成第二强度矩阵;以及控制器,被配置为基于第一和第二强度矩阵中的至少一个生成更新调制掩模,以传输到光学调制器。
21.在一些实施例中,光学调制器包括空间光调制器,空间光调制器被配置为调制泵浦光束的小波的相位,以生成调制光束,并且调制掩模是二进制相位图案。
22.在一些实施例中,空间光调制器被配置为通过基于调制掩模将小波中的每一个的相位编码为第一相位或第二相位,来调制泵浦光束的小波的相位,并且第一和第二相位相差180
°
。
23.在一些实施例中,光学调制器包括数字微镜器件,数字微镜器件被配置为调制泵浦光束的小波的强度,以生成调制光束。
24.在一些实施例中,控制器被配置为通过以下方式生成更新调制掩模:将相机状态确定为第一强度矩阵、第二强度矩阵或者第一和第二强度矩阵的加权和;以及基于调制掩
模和相机状态来确定更新调制掩模。
25.在一些实施例中,基于调制掩模和相机状态确定更新调制掩模包括:将更新调制掩模确定为调制掩模与相机状态和反馈步长的乘积之间的差。
26.在一些实施例中,泵浦光束包括由光源生成的高斯脉冲序列中的高斯脉冲,并且反馈步长对应于高斯脉冲序列的周期性。
27.在一些实施例中,控制器被配置为在生成更新调制掩模之前适应性地调整反馈步长。
28.根据本发明的一些实施例,提供了一种光学计算系统,包括:光学放大器,被配置为生成具有平坦相位波前的泵浦光束;简并光学参量放大器,被配置为基于泵浦光束在小波中生成双波长信号;滤光器,被配置为从信号中过滤泵浦光束;光学分束器,被配置为读出信号的一部分;非线性光学晶体,被配置为基于信号生成二次谐波光;第一双波段反射器,被配置为分离信号和二次谐波光;光学接收器,被配置为将二次谐波光耦合到光学放大器中;以及第二双波段反射器,被配置为将信号和二次谐波光组合到简并光学参量放大器中。
29.在一些实施例中,光学计算系统进一步包括:第一傅立叶透镜,被配置为将信号聚焦到非线性光学晶体中,以生成二次谐波光;以及第二傅立叶透镜,其位于第一和第二双波段反射器之间,并被配置为使信号散焦。
30.在一些实施例中,第一和第二双波段反射器中的每一个都包括分色镜或滤光器。
31.在一些实施例中,随着信号连续穿过光学计算系统,光学放大器的光学增益增加,直到光学参量振荡发生。
32.在一些实施例中,光学计算系统还包括位于简并光学参量放大器和非线性光学晶体之间的第一光学调制器,第一光学调制器被配置为在信号到达非线性光学晶体之前调制信号,以改变光学计算系统的有效四体相互作用哈密顿函数。
33.在一些实施例中,光学计算系统还包括位于非线性光学晶体和光学接收器之间的第二光学调制器,第二光学调制器被配置为调制二次谐波光,以改变光学计算系统的有效四体相互作用哈密顿函数。
34.根据本发明的一些实施例,提供了一种光学计算系统,包括:光学放大器,被配置为生成具有平坦相位波前的放大信号;非线性光学器件,被配置为接收放大信号并基于放大信号通过二次谐波生成来生成泵浦光束;简并光学参量放大器,被配置为基于泵浦光束在小波中生成双波长信号;滤光器,被配置为从信号中过滤泵浦光束;第一光学分束器,被配置为读出信号的一部分;第二光学分束器,被配置为将信号的第一部分引导至用于调制信号的该部分的光学调制器,并将信号的第二部分引导至分色镜;以及光学接收器,被配置为将信号的调制的第一部分耦合到光学放大器中,以生成放大信号,其中,分色镜被配置为将信号的第二部分与泵浦光束组合到简并光学参量放大器中。
35.在一些实施例中,光学调制器包括空间光调制器或数字微镜器件,并且非线性光学器件包括非线性光学晶体或光波导。
附图说明
36.附图与说明书一起示出了本公开的示例实施例,并且与说明书一起用于解释本公
开的原理。
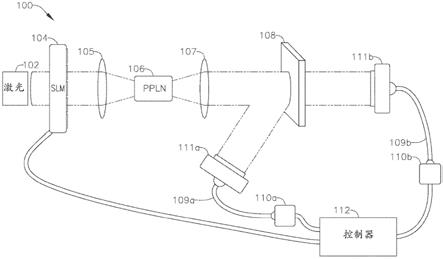
37.图1示出了根据本公开的一些实施例的光学计算系统。
38.图2示出了根据本公开的一些实施例的控制光学计算系统以识别系统能量的近似基态的过程。
39.图3-图6是示出根据本公开的一些示例实施例的光学计算系统将其输出演化到其能量基态附近的能力的示图。
40.图7示出了根据本公开的一些实施例的利用自松弛反馈机制的光学计算系统。
41.图8示出了根据本公开的一些实施例的由控制器进行的状态更新的示例。
42.图9a-图9b和图10示出了根据本公开的一些实施例的利用光学反馈的光学计算系统。
43.图11(a)-图11(c)示出了根据本公开的一些实施例的在伊辛模型中分割的示图。
具体实施方式
44.以下阐述的详细描述旨在作为根据本公开提供的用于仿真伊辛机以解决不可能或难以解决的组合优化问题的系统和方法的示例实施例的描述,并且不旨在表示可以构建或利用本公开的唯一形式。该描述结合所示的实施例阐述了本公开的特征。然而,应当理解,相同或等效的功能和结构可以通过不同的实施例来实现,这些实施例也旨在包含在本公开的范围内。如本文别处所示,相似的元件编号旨在指示相似的元件或特征。
45.在整个说明书中,术语在上下文中可能具有暗示或暗指的微妙含义,而不仅仅是明确陈述的含义。
46.本发明涉及一种能够解决许多组合优化问题的光学计算系统/伊辛机,这些问题使用现有的现代计算机是不可能或难以解决的。更具体地说,本发明涉及可以解决组合优化问题的机器,这些问题涉及诸如蛋白质折叠和药物发现的生命科学、研究社交网络影响的社会学、寻找具有最大边数的切割(max-cut)的图论以及确定布尔可满足性(k-sat)的计算机科学等领域。更一般地,本发明涉及非确定性的、多项式的、时间困难的问题,例如,以上那些问题,这些问题的根源在于多体相互作用。
47.根据一些实施例,本公开的系统和方法涉及一种光学计算系统(在本文中也称为伊辛机/仿真器),其能够进行可调节的两体相互作用、四体相互作用,在大量自旋上具有全对全连接,以托管伊辛机。使用空间光调制器(slm)可以灵活地控制每个自旋的能量(例如,化学势)及其对总能量的共同贡献。泵浦功率及其二次谐波(sh)功率的光学测量可以分别模拟两体和四体相互作用。基于蒙特卡罗的自适应反馈控制器用于演化有效自旋系统,以找到给定伊辛问题的近似基态解。由本公开的系统模拟的高阶、多体相互作用也可以用作光学机器学习的强大激活功能。诸如矩阵乘法、傅立叶变换和四体相互作用等主要计算任务经由非线性光学系统来执行或由非线性光学系统来模拟。目前的伊辛模拟器可能会为大数据分析和量子模拟的其他不可及的领域开辟一条道路。
48.根据一些实施例,光学计算系统包括非线性光学系统,该非线性光学系统能够仿真包含非常大量的自旋(例如,一百万个自旋或更多)的伊辛机。光学计算系统能够操纵具有全对全连接的两体和四体相互作用。利用空间光调制器以相干激光束中的小波的二进制相位值的形式编码和控制自旋,并在傅立叶平面上模拟非线性晶体中频率转换的高阶相互
作用。通过自适应反馈控制,系统可以演化成有效的自旋配置,这些配置很好地逼近具有全对全连接的多体相互作用的伊辛哈密顿函数的基态。
49.实际上,光学计算系统使用激光器和空间光调制器对给定的多体问题进行编码,并通过光学元件和由其执行的非线性处理来执行计算操作,例如,傅立叶变换、矩阵乘法和非线性相互作用。光学计算系统使用与光功率计或相机连接的单模光纤来执行测量,并使用检测到的信号来提供自适应反馈(例如,经由蒙特卡罗自旋翻转),以演进系统。光学计算系统包括激光器、空间光调制器、光学元件、非线性晶体、单模光纤以及一个或多个相机和/或功率计。
50.图1示出了根据本公开的一些实施例的光学计算系统100。
51.光学计算系统100(也称为基于光学的计算系统)可以是能够在大量自旋上模拟化学势、两体相互作用和四体相互作用的非线性光学伊辛机。因此,光学计算系统是在执行计算时操纵光子束的系统。
52.根据一些实施例,光学计算系统(例如,伊辛仿真器)100包括光源(例如,激光器)102、空间光调制器(slm)104、非线性介质(例如,周期极化铌酸锂(ppln)晶体)106、分色镜108、检测器110和控制器112。
53.光源102被配置为产生输入到slm 104的高斯泵浦光束。在一些示例中,光源102生成光脉冲序列。入射到slm 104上的泵浦光束的横向fwhm可以是大约2.6mm或者不同的值,这取决于slm104的尺寸。
54.slm 104被配置为接收调制掩模(例如,相位掩模)并调制泵浦光束的小波的相位,以基于相位掩模生成调制的(例如,空间调制的)小波。在一些示例中,slm 104可以具有足够高的分辨率(例如,1440
×
1050像素),以将超过一百万像素/自旋的相位掩模编码到高斯光束上。在一些实施例中,相位掩模是二进制相位掩模,每个像素对应于0或π的相位值。在一些实施例中,光学计算系统100还包括第一透镜105(例如,具有大约200mm焦距的聚焦透镜),被配置为将调制光束聚焦在非线性介质106内部(例如,靠近中心)。
55.在一些实施例中,可以是温度稳定的ppln晶体的非线性介质106被配置为执行非线性过程,以基于调制的泵浦光束生成二次谐波(sh)光束。sh生成实现了自旋之间的有效相互作用。在一些示例中,对于sh生成,ppln晶体可以具有大约19.36μm的极化周期和大约1cm的长度。晶体内的泵浦束腰大约为45μm。
56.光学计算系统利用第二透镜(例如,准直透镜)107将由非线性介质106输出的sh光束和剩余的泵浦光束(即,未转换的泵浦光束)准直(例如,对准)到分色镜108上。在一些实施例中,分色镜108(或双波长反射器)被配置为过滤非线性介质106的准直输出,以去耦合(例如,空间分离)sh光束和剩余的/未转换的泵浦光束,该光束可以使用光纤耦合器/准直器(例如,非球面透镜)111a和111b耦合到单模光纤(smf)109a和109b中。在一些实施例中,检测器110包括分别耦合到smf 109a和109b的两个光功率计(例如,光电二极管)110a和110b,这两个光功率计分别测量sh光束和剩余泵浦光束的光功率。
57.在一些实施例中,光学计算系统使用测量的泵浦功率来模拟与两体(即自旋间)相互作用相关联的能量,并且测量的sh功率用于捕获自旋之间的四体相互作用。总势能(例如,总化学势能)是在slm104处编码的所有自旋的加权和。控制器112然后基于测量的泵浦和sh功率更新slm 104处的相位掩模,以迭代地找到由光学计算系统100模拟的伊辛问题的
最佳基态解或其近似值。
58.根据一些实施例,检测器110使用具有许多像素的两个ccd相机来测量泵浦和sh光束的空间光功率。控制器112然后使用ccd相机结果作为slm 104上的下一个迭代步骤的输入。
59.在其他实施例中,使用光学环路来实现反馈控制,并且空间光调制器由非线性光学器件代替。
60.光学计算系统的有效哈密顿函数表示为:
61.h=αh1+βh2+γh4,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式(1)
62.其中,α、β和γ是哈密顿函数的可调参数,h1、h2和h4分别表示化学势、两体相互作用和四体相互作用。这些可以表示为
[0063][0064]
以及
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式(3)
[0065][0066]
在此处,光源102产生具有峰值振幅e0和束腰w
p
的波长为λ
p
的高斯泵浦光束。泵浦光束入射到slm 104上,slm 104的相位掩模由以(x
′m,y
′m)为中心的m
×
n个像素(m,n)组成。紧接在slm 104之后的横向电场是
[0067][0068]
其中,是像素(m,n)处的幅度,π是宽度a的矩形函数,σmn=
±
1(二进制相位调制)。
[0069]
焦距为f的傅立叶透镜可以转换长度为l的周期极化铌酸锂(ppln)晶体中心的电场。给出
[0070][0071]
其中,κ
p
=2πn
p
/λ
p
,n
p
是ppln晶体中泵浦的折射率。由于只有近轴光被耦合到smf 109a和109b中,这使得sinc(axπ/λ
p
f)=sinc(ayπ/λ
p
f)≈1,并且将上述等式简化为
[0072][0073]
通过使用简化的符号和来简化上述等式中的二重求和,其中,i=1,2,...n,具有n=n1×
n1个自旋,等式7可以表示为
[0074][0075]
非线性介质106内部的泵浦光束和sh光束的动态特性可以通过以下等式来评估
[0076][0077]
[0078]
其中,κ
sh
=2πn
sh
/λ
sh
=n
sh
ω
sh
/c是sh光在折射率为n
sh
的晶体中的波数,ω
sh
是sh光的频率,δκ=2κ
p-κ
sh-2π/λ是相位失配,极化周期为λ。假设具有未耗尽泵浦和可忽略不计的小衍射的相位匹配条件,
[0079][0080]
其中,在非线性介质106的输出端,泵浦波和sh波均耦合到单模光纤中,并被光功率计(例如,光电二极管)110a和110b检测到。泵浦波和sh波的光功率分别是
[0081][0082]
和
[0083][0084]
其中,是束腰分别为和的归一化反向传播光纤模式。
[0085]
因此,检测到的泵浦波和sh波的光功率是
[0086][0087]
和
[0088][0089]
其中,以及
[0090][0091]
因此:
[0092][0093]
和
[0094][0095]
其中,和分别为两体和四体相互作用项。
[0096]
在此处,系统的总能量(包括所有自旋及其两体和四体相互作用)可以用定义为下式的单个参数来表征
[0097]
e=αc+βp
p
+γph,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式(18)
[0098]
其中,α、β和γ是自由参数,分别定义化学势、两体和四体相互作用能的贡献。通过适当地设置自由参数,光学计算系统100可以建模伊辛问题。是表示化学能的自旋的加权和,局部化学势为μi∈[-1,1]。等式(18)等效于等式(1)中定义的有效哈密顿函数,以求系统的基态解。系统的磁化可以定义为为了求出系统总能量的最
小值或最小值的近似值,控制器112通过自适应反馈迭代地更新(例如,优化)slm 104处的相位掩模。
[0099]
图2示出了根据本公开的一些实施例的控制光学计算系统100以识别系统能量的近似基态的过程200。应当理解,该过程的步骤顺序不是固定的,并且可以修改、改变顺序、不同地执行、依次执行、并发地或同时地执行,或者改变成任何期望的顺序,如本领域技术人员所认识到的。
[0100]
在框202,控制器112驱动光源102生成主泵浦光束,生成可以是随机二进制相位掩模的初始相位掩模,并将初始相位掩模应用于slm 104,以调制泵浦光束的小波的相位,从而基于初始相位掩模生成调制光束。
[0101]
在框204,控制器112经由等式18定义由光学计算系统100模拟的系统的能量。在这样,控制器112确定自由参数α、β和γ,以分别定义化学势、两体和四体相互作用能的贡献,以便建模由光学计算系统100模拟的伊辛问题。
[0102]
在框206,控制器112在具有系统的尺寸s和热能τ的相位掩模中定义(例如,随机选择)像素簇。在一些实施例中,相位掩模可以具有带有s个像素的正方形或矩形形状。然而,本公开的实施例不限于此,簇可以具有任何合适的形状。在此处,热能τ可以简单地是该优化算法的参数,而不是物理量。
[0103]
在框208,控制器112从检测器110接收主泵浦光束的第一光功率和sh光束的第二光功率。
[0104]
在框210,控制器112使用等式18并基于第一和第二光焦度以及在框204确定的自由参数α、β和γ来确定当前系统能量e
新
。控制器112将系统能量的变化u计算为当前系统能量和先前最小系统能量e
旧
之间的差e
旧
(u=e
新-e
旧
))。控制器112进一步确定玻尔兹曼概率p=exp(-u/τ)。
[0105]
在框212和214,控制器112确定是否在slm更新相位掩模。这样,在框212,控制器检查是否满足基于当前系统能量和玻尔兹曼概率的优化标准。当系统能量u的变化为负时(即,当前系统能量e
新
是迄今为止计算的最低系统能量),或者如果玻尔兹曼概率p大于随机变量f,其为0和1之间的真实值,则满足该标准。当这些条件都不满足时,在框216,控制器112确定更新新相位掩模。这样,控制器112通过翻转先前相位掩模的随机选择的大小为s的簇中的自旋来生成新的相位掩模(框206)。当满足优化标准时,控制器还确定迭代次数(例如,反馈迭代计数)是否小于阈值(例如,1200)。如果是,则控制器112继续在框216更新相位掩模。
[0106]
当控制器112确定不再更新相位掩模时,在框218,控制器112收集结果,以将当前系统能量和先前最小系统能量中的较小者识别为近似基态。
[0107]
因此,为了减少(例如,最小化)总能量,控制器112遵循蒙特卡罗方法,适应性地翻转随机选择的大小为s的簇内的所有自旋。在每次迭代中,根据能量变化函数u和玻尔兹曼概率p=exp(-u/τ)接受或拒绝翻转的自旋,其中,u=e
新-e
旧
是由于自旋翻转引起的能量变化,τ是热能。为了避免陷入局部最小值,在迭代过程中簇的大小s和热能都是变化的。
[0108]
图3-图6是示出根据本公开的一些示例实施例的光学计算系统100将其输出演化到其能量基态附近的能力的示图。
[0109]
图3示出了纯四体相互作用和800
×
800自旋的全对全连接的结果,即α=0和β=0
(见等式18)。图3(a)绘出了γ=-1的sh光束功率演变,其中,系统的基态对应于最大sh功率。在这种情况下,系统表现出类似铁磁性的行为。相反,图3(b)绘出了γ=1时sh功率的演变,以通过最小化sh功率来求出基态。最小可检测sh功率接近光学传感器的极限(~5nw)。在这个示例中,系统演变成一种类似顺磁性的状态。在图3(a)和图3(b)中,即使图中显示的数据以不同的初始相位掩模(对应于不同的随机自旋配置)开始,系统也演变,以求出基态解。这表明根据本发明的实施例制造的机器可以可靠且有效地进化到其基态附近。
[0110]
图4示出了800
×
800自旋的两体相互作用和全对全连接,即α=0、β=-1和γ=0。图4(a)示出了泵浦光束功率的演变。随着泵浦功率的增加,使系统演化,以使总能量e最小化。图4(b)示出了磁化m的演化。当α=0时,存在自发的对称性破缺,因为如果所有自旋翻转,系统能量保持不变。这样,反馈控制将以相等的概率优化朝向正或负磁状态的自旋。这在图4(b)中很清楚,其中,磁化趋势是双向的。
[0111]
图5示出了对于800
×
800自旋的优化,α=-1、β=-1和γ=-1的测量结果。以幂对迭代次数的对数标度示出结果。图5(a)和图5(b)绘出了四种不同初始相位掩模的sh和泵浦功率的演变。图5(c)描绘了系统的相应磁化。图5(d)示出了初始和最终相位掩模,其中,黑色和白色像素分别表示正和负取向自旋。图5(d)(1)-(4)表示对具有不同输入二进制自旋配置的sh和泵浦功率的评估。在所有情况下,这些结果表明,泵浦的光功率及其sh收敛到最佳值,该最佳值属于给定伊辛问题的基态解。
[0112]
图6示出了α=1、β=-0.5和γ=-1时的结果。图6(a)和图6(b)分别示出了泵浦和sh功率的演变,图6(c)绘出了系统的相应磁化。当泵浦和sh功率都随着迭代次数增加时,磁化强度在负方向上获取最佳值。图6(d)示出了初始和最终相位掩模图案,其中,相位掩模图案的黑色和白色区域分别是正和负取向自旋。图6(d)(1)-(3)表示对具有不同输入二进制相位掩模的sh和泵浦功率的评估。这些结果表明光学伊辛机可以求出给定伊辛问题的近似基态解。
[0113]
图7示出了根据本公开的一些实施例的利用自松弛反馈机制的光学计算系统700。除了调制器704、相机710a和710b以及控制器712之外,图7的系统700基本上类似于图1的系统100。这样,为了便于描述,系统100和700共有的部件在此不再描述。
[0114]
参考图7,根据一些实施例,高斯泵浦激光束(例如,波长为1551.5nm)入射到调制器704上,该调制器可以是用于调制入射泵浦光束的相位的slm 104,或者可以是用于调制入射泵浦光束的强度的数字微镜器件(dmd)。分色镜108被安装成将sh光(例如,波长为775.75nm)从未转换的/剩余的泵浦光束(可以是ab红外光束)中分离出来。在一些实施例中,第一相机710a(例如,红外相机)捕获来自分色镜108的未转换/剩余的泵浦光束的强度,第二相机710b(例如,可见光相机)捕获来自分色镜108的sh光束的强度。由第二相机710b捕获的sh光可以模拟各种四体相互作用哈密顿函数。由第二相机710b处的像素矩阵捕获的强度矩阵/图案可以被写为:
[0115][0116]
其中,j
′
ijsr
是四体相互作用强度。同时,由第一相机710a捕获的未转换的光可以模拟两体相互作用,其中,第一相机处的强度矩阵/图案是:
[0117]
[0118]
这两个相机可以单独工作,也可以计算其加权和αi2(x,y)+βi4(x,y),来实现自放松反馈。相机710a和710b的每个像素的强度读数是量化的灰度值。控制器712处理来自相机710a和710b的图像(或强度矩阵),并控制调制器(例如,slm或dmd)704,以用新的相位或强度信息更新调制器704处的相位或强度掩模。
[0119]
根据一些实施例,光学计算系统700将四体相互作用结合到光学环路中,以形成自松弛伊辛机,该自松弛伊辛机可以自动演化成期望的自旋配置。这样,光学计算系统700利用量子系统的虚数时间演化来实现自松弛反馈。为了说明这一点,假设在时间t=0时调制器704处的相位/强度信息/状态是|ψ(0)》,并且整个系统700的哈密顿函数是h(包括相位/强度调制、通过光学器件的光束传播、二次谐波生成、相机上的强度测量以及像素值的任何数字处理),则在时间t时的状态是
[0120]
|ψ(t)》=e-iht
|ψ(0)》。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式(21)
[0121]
从数学的角度来看,实值时间t可以用虚构值-it来代替。然后,该状态将是|ψ(-it)》=e-ih(-it)
|ψ(0)》=e-ht
|ψ(0)》。初始状态|ψ(0)》是随机态,该状态是不同本征态的线性组合,|ψ(0)》=∑
ncn
|n》。因此,时间t的状态可以表示为
[0122][0123]
众所周知,较低的本征态具有较低的本征值,即e0<e1<e2<
…
因此,随着时间的推移,基态|0》将比其他状态更突出,因为其衰变常数e0导致最慢的衰变速度。在一些实施例中,量子状态在进化的每个步骤之后被重新归一化。
[0124]
图8示出了根据本公开的一些实施例的由控制器712进行的状态更新的示例。
[0125]
在图8的示例中,在时间t的调制器状态是|ψ(t)》,反馈环路之间的时间步长是dt。因此,相机状态i4(x,y,t)可以写成h|ψ(t)》。因为在时间t+dt的新状态是t+dt是|ψ(t+dt)》=e-hdt
|ψ(t)》,并且时间步长dt足够小,以至于可以忽略指数展开的高阶:
[0126][0127]
然后得出:
[0128][0129]
因此,新的调制器状态(|ψ(t+dt)》)可以表示为先前调制器状态|ψ(t)和dt乘以相机状态(h|ψ(t)》)之间的差。
[0130]
在启动时,控制器712选择随机状态|ψ0》,作为初始调制器相位状态。在穿过非线性晶体之后,上转换光(即sh光束)和未转换光(即剩余的泵浦光束)被相机710a和710b检测到。根据光学计算系统700所模拟的问题,控制器712计算总的相机状态|φ0》,作为来自第一和第二相机710a和710b之一的强度矩阵(即,i2(x,y)or i4(x,y)))或者强度矩阵的加权和(即,αi2(x,y)+βi4(x,y))。
[0131]
根据一些实施例,控制器712通过计算新状态为|ψ1》=|ψ0》-δt|φ0》,并通过初始状态将其归一化,来确定更新调制器相位状态。因此,控制器712确定下一循环迭代的新调制器状态相位为:
[0132][0133]
在此处,反馈环路的时间步长δt足够小,可以减少或最小化数值误差。在一些示
例中,反馈步长δt表示光源102的脉冲序列的周期性。在一些实施例中,控制器712自适应地调整δt,以实现自松弛,因为光学计算系统700的动态可以加速或变慢。可以选择步长,使得等式(22)中进行的近似是有效的。
[0134]
根据一些实施例,光学计算系统可以自动对准其自旋,以最大化或最小化其相互作用能量。
[0135]
图9a示出了根据本公开的一些实施例的利用光学反馈的光学计算系统900。
[0136]
在图9的示例中,使用光学环路来提供反馈,其中,只有具有最高四体相互作用能量的自旋配置将满足光学振荡条件并积累。光学环路从光学放大器(oa)902开始,以生成具有平坦相位波前的二次谐波波长的弱泵浦光束,从而驱动简并光学参量放大器(dopa)904。dopa 904可以是二阶非线性的相位匹配或准相位匹配光学介质,例如,β硼酸钡(bbo)晶体、磷酸钛氧钾(ktp)晶体或周期极化铌酸锂(ppln)晶体。在dopa 904中,泵浦光束生成并放大两倍波长的信号波。泵浦光束是宽的,使得在dopa 904内部几乎没有衍射,并且在泵浦光束的横截面上独立地生成/放大许多信号小波,每个信号小波表示一个自旋。
[0137]
在dopa 904之后,通过使用滤波器906过滤/去除泵浦光束,滤波器906可以是带通滤波器、边缘滤波器、分色镜等,并且使用第一傅立叶透镜908将信号聚焦到二次谐波生成(shg)装置910中。shg装置910可以是二阶非线性的相位匹配或准相位匹配光学介质,例如,bbo晶体、ktp晶体或ppln晶体。在sh生成期间,实现自旋之间的有效相互作用,以产生二次谐波光。在输出端,剩余的泵浦信号和生成的sh光大致在第一双波段反射器(例如,第一分色镜(dm)或滤光器)912或任何其他光学器件处分离。剩余的泵浦信号然后通过第二傅立叶透镜914,以取消聚焦。然后经由第二双波段反射器(例如,第二分色镜或滤光器)916将其导向dopa 904。另一方面,sh光由光学接收器(or)918收集,该光学接收器可以是光纤或自由空间光学器件的准直光束。然后,sh光被oa 902放大,并与剩余的泵浦信号组合,并被引导到dopa 904,作为新的泵浦。该环路将运行多次,直到产生稳定的结果,在此基础上,将经由分束器(bs)920读取信号,以测量其在横向剖面上的自旋。在此处,随着信号连续穿过光学计算系统,光学放大器的光学增益增加,直到发生光学参量振荡。
[0138]
在这种光学配置中,dopa 904通过简并光学参量放大生成并放大泵浦光束横截面上的信号小波。因为泵浦光束具有平坦的相位波前,所以在每个空间网格(即像素)处生成的信号小波可以与泵浦光束具有相同的相位,或者相反。这种机制定义了信号小波的离散相位,使得信号小波中的每一个都可以表示自旋向上(相对于泵浦的0相位)或自旋向下(相对于泵浦的pi相位)。最初,没有信号,dopa 904可以被理解为放大真空噪音的量子过程。真空噪音包含了所有可能的自旋配置。将过滤放大的真空噪音,然后,排空泵浦。然后,噪音将聚焦到二阶非线性晶体中,用于生成sh。在sh生成期间可以产生的二次谐波光的量取决于自旋配置。事实上,其强度可以被写成自旋的四体相互作用的能量。所得到的二次谐波信号然后被oa 902放大,以产生dopa 904的泵浦,从而在下一轮放大信号。环路将持续运行。
[0139]
以这种方式,光学计算系统900有效地实现了光学参量振荡器(opo),区别在于,在此处,通过sh生成和光学放大的中间步骤来实现光学增益。当操作时,oa 902的光学增益可以缓慢增加,直到出现第一光学参量振荡信号,即,直到可以读出强且稳定的信号。当发生这种情况时,信号将以理想的自旋配置准备,以使四体相互作用最大化。这是因为其他配置将产生较少的二次谐波光,因此有效opo增益较小。由于opo要求每个光学环路期间的光学
增益大于净损耗,通过缓慢增加oa增益,当期望的自旋配置的光学增益刚好超过净损耗时,只出现第一opo信号。所有其它的自旋配置将导致更多的损耗而不是增益,因此对于这些其它的自旋配置不可能有光学振荡。在此处,在opo发生之前,在所有可能的自旋配置中,dopa过程可以被理解为真空噪音的放大。
[0140]
为了进一步确保只存在一种自旋配置,可以将oa设置为在光功率饱和极限下操作,即,如果输出功率达到极限,oa将停止放大。以这种方式,在为期望的自旋配置建立了opo之后,信号和泵浦功率都增加,以使oa饱和,从而降低了其他自旋配置的有效增益。
[0141]
在一些实施例中,可以通过首先用具有平坦相位波前的本地振荡器对其进行干涉,然后使用ccd相机对其进行测量,来读出信号的自旋配置。在一些实施例中,信号可以通过线性光学元件,例如,傅立叶透镜,从而可以在不同模式的基础上测量其自旋配置。
[0142]
在一些实施例中,光学环路相对于任何热、机械或其他漂移是稳定的。可以通过反馈控制机制来实现稳定。
[0143]
根据一些实施例,修改有效相互作用哈密顿函数,以模制感兴趣的实际问题。这可以通过在shg之前对信号应用光学调制,和/或在被or收集之前对生成的二次谐波光进行调制来实现。在图9b中描述这个选项。在光学计算系统900-1中,用于泵浦(mp)的光学调制器922和用于信号(ms)的光学调制器924的调制可以具有相位调制、振幅调制或这两者的形式。可以使用空间光调制器、数字微镜器件或这两者的组合来实现调制。对于泵浦光,可以通过其他方式有效地实现调制,例如,将其耦合到单模光纤中。
[0144]
图9a和图9b具体描述了如何通过优化自旋配置使四体相互作用最大化。通过使dopa的泵浦功率与二次谐波光的检测功率成反比,可以开发类似的方案,来最小化四体相互作用。
[0145]
除了最大化或最小化四体相互作用之外,同样的原理可以用来寻找最大化或最小化两体相互作用的自旋配置。
[0146]
图10给出了这样一个示例,该示例遵循图9a的基本结构,但是部分分离信号,并且不通过shg 910而直接检测该信号。为了调制有效的两体相互作用哈密顿函数,在检测之前由光学调制器(ms)924调制信号。在一些实施例中,这种调制不是必需的,并且可以被规避。检测到的信号产生具有平坦相位波前的泵浦来驱动dopa 904。在一些实施例中,这是通过首先放大信号功率,然后将其倍频来实现的,如图9b所示。在一些实施例中,使用可调增益激光源或固定增益激光源(但是具有可调分束器或可变功率衰减器)对信号进行光电检测,并且所得的电子信号用于控制泵浦功率,以驱动dopa。
[0147]
如图10所示,根据一些实施例,光学计算系统1000包括光学放大器(oa)902,被配置为生成具有平坦相位波前的放大信号;非线性光学器件(shg)910,被配置为接收放大信号并基于放大信号通过二次谐波生成来生成泵浦光束;简并光学参量放大器(dopa)904,被配置为基于泵浦光束在小波中生成双波长信号;滤光器(ft)906,被配置为从信号中过滤泵浦光束;第一光学分束器(bs)920,被配置为读出信号的一部分;第二光学分束器921,被配置为将信号的第一部分引导至光学调制器(ms)924,以调制信号的该部分,并将信号的第二部分引导至分色镜(dm)916;以及光学接收器(or)918,被配置为将信号的调制的第一部分耦合到光学放大器902中,以生成放大信号。在此处,分色镜916被配置为将信号的第二部分与泵浦光束组合到简并光学参量放大器中。根据一些示例,光学调制器924可以是空间光调
制器或数字微镜器件,非线性光学器件910可以是非线性光学晶体或光波导。
[0148]
在一些实施例中,可以组合两体和四体相互作用的方案,以找到最大化或最小化一个相互作用同时也最大化或最小化另一个相互作用或者最大化或最小化这两者的加权和的自旋配置。
[0149]
虽然本文公开的光学计算系统仅支持两体和四体相互作用,但是可以采用非线性光学器件的其他过程,例如,和频、四波混频和高阶谐波生成,来实现更高阶的相互作用,其计算复杂度和强度可能会快速增长到超出现有计算平台的能力。
[0150]
将np-难度问题映射到伊辛模型的示例:
[0151]
许多np-难度问题可以被绘制成图,并且这些图可以被映射成伊辛模型。下面是将划分图问题映射成伊辛问题的示例。
[0152]
考虑一个简单的无向图g=(v,e),其具有n个v顶点的节点和e条边,问题可能是通过划分其节点集来将图分成“m”个子图。有m
(n-1)-1种方法将图分成具有n个节点的子图。为了最佳地计算顶点的划分,v=v0uv1uv2uv
m-1
,需要满足以下条件:
[0153]
1){vi}是不相交的
→vi
∩vj=φ
[0154]
2)所有{vi}大致平衡
→
|vi|~|vj|
[0155]
3)切割边的数量应为最小值/最大值,即,|e
切割
|
最小/最大
={(u,v)|uεvi,vεvj,i≠j}。
[0156]
求出大量节点的图划分的精确解是np组合优化问题。为了简单起见,可以考虑一个图,该图具有5个与6条边连接的节点,权重为w
ij
,其中,i≠j是节点,w
ij
=w
ji
>0,如图11(a)所示。有许多方法可以将这个图切割成两个子图,以找到通过最大数量的边的切割。图11(b)和11(c)示出了其中的两个。当分割图时,值si={+,-}可以被分配给分离的子图的节点。切割的成本函数可以表示为点。切割的成本函数可以表示为其中,如果在同一个子图中的i,j是1,则的值为零,否则为1。成本函数可以重写为
[0157]
c=∑
i<jwij-∑
i<j
sisjw
ij
。
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
等式(24)
[0158]
可以通过最小化成本函数的第二项来找到最大切割解。这表明成本函数的最小化等价于伊辛哈密顿函数的能量的最小化。
[0159]
具有成对和高阶相互作用的伊辛模型是统计物理和机器学习的活跃研究领域。根据本公开的一些实施例,具有大量节点和全对全连接的非线性光学系统是更快解决这些问题的可行解决方案。
[0160]
由本公开的光学计算系统的组成部件(例如,控制器)执行的操作可以由“处理电路”或“处理器”来执行,该“处理电路”或“处理器”可以包括用于处理数据或数字信号的硬件、固件和软件的任意组合。处理电路硬件可以包括例如专用集成电路(asic)、通用或专用中央处理单元(cpu)、数字信号处理器(dsp)、图形处理单元(gpu)以及诸如现场可编程门阵列(fpga)等可编程逻辑器件。如本文所用,在处理电路中,每个功能由被配置(即硬连线)为执行该功能的硬件来执行,或者由被配置为执行存储在非暂时性存储介质中的指令的更通用的硬件(例如,cpu)来执行。可以在单个印刷线路板(pwb)上制造处理电路,或者处理电路可以分布在几个互连的pwb上。处理电路可以包含其他处理电路;例如,处理电路可以包括在pwb上互连的两个处理电路,即fpga和cpu。
[0161]
应当理解,尽管术语“第一”、“第二”、“第三”等可以在此处用来描述各种元件、部
件、区域、层和/或部分,但是这些元件、部件、区域、层和/或部分不应该受到这些术语的限制。这些术语用于将一个元件、部件、区域、层或部分与另一个元件、部件、区域、层或部分区分开来。因此,下面讨论的第一元件、部件、区域、层或部分可以被称为第二元件、部件、区域、层或部分,而不脱离本发明概念的范围。
[0162]
在此处使用的术语是为了描述特定的实施例,而不是为了限制本发明的概念。如本文所用,单数形式“一种”(a)和“一种”(an)也旨在包括复数形式,除非上下文另有明确指示。还应当理解,当在本说明书中使用时,术语“包括”(include)、“包括”(including)、“包含”(comprises)和/或“包含”(comprising)指定存在所述特征、整数、步骤、操作、元件和/或部件,但是不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、部件和/或其组。如本文所用,术语“和/或”包括一个或多个相关列出项目的任何和所有组合。此外,当描述本发明构思的实施例时,使用“可以”是指“本发明构思的一个或多个实施例”。此外,术语“示例性”旨在表示示例或说明。
[0163]
如本文所用,术语“使用”(use)、“使用”(using)和“使用的”(used)可以被认为分别与术语“利用”(utilize)、“利用”(utilizing)和“利用的”(utilized)同义。
[0164]
此外,当描述本发明构思的实施例时,使用“可以”是指“本发明构思的一个或多个实施例”。此外,术语“示例性”旨在表示示例或说明。
[0165]
虽然已经结合某些示例性实施例描述了本发明,但是应当理解,本发明不限于所公开的实施例,而是相反,旨在覆盖包括在所附权利要求及其等同物的精神和范围内的各种修改和等同布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1