骨料加工设备、系统和方法与流程
1.骨料加工设备、系统和方法用于加工骨料材料。
附图说明
2.图1示意性地示出了骨料加工系统的实施例。
3.图2示意性地示出了固定的骨料加工车间的实施例。
4.图3示出了具有特定传感器和控制元件的振动分类器的实施例。
5.图4示出了具有特定传感器和控制元件的破碎机的实施例。
6.图5是具有特定传感器和控制元件的破碎机的实施例的侧立面视图。
7.图6是沿图5的截面6-6的截面视图。
8.图7是活动式车间的实施例的侧立面视图。
9.图8示出了图形用户界面的实施例。
10.图9示出了控制和/或监测骨料加工车间的方法的实施例。
11.图10示出了控制和/或监测骨料加工车间的另一方法的实施例。
12.图11示出了控制和/或监测骨料加工车间的另一方法的实施例。
13.图12示出了动态传感器的实施例。
14.图13示出了用户界面的实施例。
15.图14示出了用户界面的另一实施例。
具体实施方式
16.参考附图,其中,贯穿若干视图,相同的附图标记表示相同或相应的零件,图1示意性地示出了骨料加工系统100。
17.在一些实施例中,骨料加工系统100包括一个或更多个固定的装备控制和监测系统110,该固定的装备控制和监测系统110与固定的骨料加工装备单元(诸如本文所描述的那些)的一个或更多个单元相关联(例如,支撑在其上和/或与其进行数据通信)。如本文使用的“骨料加工装备”包括但不限于破碎机(例如,颚式破碎机、锥形破碎机、水平轴冲击器、竖直轴冲击器、研磨机等)、振动分类器(例如,水平筛、倾斜筛、格筛进料机等)、湿加工装备(脱水筛、洗涤器、分类箱、水力旋流器等)、输送机(例如,跳跃式输送机、堆叠输送机、径向堆叠输送机、履带式输送机、陆上输送机、卡车卸载机等)和/或组合一个或更多个此类装备单元的任何固定的、活动式或可移动的加工车间。每个系统110可选地包括以下中的一个或更多个:致动器111、传感器112、处理器113、电源114、用户界面115和发射器/接收器116。
18.在一些实施例中,骨料加工系统100包括一个或更多个可移动的装备控制和监测系统120,该可移动的装备控制和监测系统120与可移动的骨料加工装备单元(诸如本文所描述的那些,例如,支撑在轨道、轮等上的车间)的一个或更多个单元相关联(例如,支撑在其上和/或与其进行数据通信)。每个系统120可选地包括以下中的一个或更多个:致动器111、传感器112、处理器113、电源114、用户界面115、发射器/接收器116和gps装置127。
19.在一些实施例中,骨料加工系统100包括一个或更多个产品传感器阵列170,该产品传感器阵列170包括一个或更多个产品数量传感器172(例如,皮带秤、填充液位传感器等)和/或一个或更多个产品特性传感器174(例如,相机、温度传感器、湿度传感器、距离传感器、填充液位传感器等)。产品数量传感器和产品特性传感器可与可移动的或固定的装备相关联,或者与一个或更多个产品转移设备(例如,输送机等)或产品存储设施(例如,贮料堆、容器等)相关联。
20.在一些实施例中,系统110、120和/或产品传感器阵列170与一个或更多个计算装置160(例如,移动装置、智能电话、平板电脑、台式计算机、服务器等)进行数据通信。在一些实施例中,系统110、120和/或产品传感器阵列170经由网络140(例如,互联网、云、内联网、一个或更多个服务器网络等)与计算装置160进行数据通信。在一些实施例中,系统110、120和/或产品传感器阵列170经由网关130(例如,无线路由器、无线中继器、无线发射器、无线电发射器、lorawan网关等)与网络140进行数据通信,该网关130可被配置为用于在相对大的距离(诸如大于10英尺、大于20英尺、大于50英尺或大于100英尺)上传输数据。网关130可选地与调制解调器135进行数据通信以将数据传输到网络140。
21.一个或更多个云连接服务150可选地与网络140和/或计算装置160进行数据通信。云连接服务150可选地包括以下中的一个或更多个:处理器151、数据存储器152、算法逻辑153、人工智能逻辑154(例如,机器学习逻辑,深度学习逻辑、无监督机器学习逻辑、有监督机器学习逻辑等)、天气数据服务155(例如,提供位置特定的环境大气信息,诸如温度、湿度、露点,海拔高度、空气压力、降水、降水量、降水可能性等)、输入成本数据服务156a(例如,可操作以提供资源的历史、当前和/或预测价格以及诸如燃料的其他输入,电力、水等)、原材料数据服务156b(例如,可操作以提供信息,诸如原材料(诸如,现场待操作的原材料)的数量、定性特性、地理参考位置等),产品数据服务156c(例如,可操作以提供待由系统100生产的不同商品和/或产品(诸如,沙子、砾石、矿物等)的历史、当前和/或预测价格)和/或图像服务(例如,空间图像服务)157。云连接服务150可选地包括一个或更多个计算器158,该计算器158用于经由用户界面从操作者收集数据(例如,装备尺寸、应用标准、材料标准等),并且至少部分地基于所收集的数据来提供一个或更多个计算(例如,贮料堆量等)或推荐(例如,操作标准、装备设定等)。云连接服务150可选地包括零件数据服务159a(例如,可操作以接收、存储或供应可用性、价格、提前时间和/或诸如那些合并在固定的或可移动的装备中的不同零件的尺寸或其他特性)。零件数据服务159a可选地包括关于零件的操作寿命的信息,该信息可以是与一个或更多个操作标准或环境条件相关的恒定值或一组值;在一些实施例中,该操作寿命信息基于为系统100内和/或外侧的零件、装备或车间收集的数据。云连接服务150可选地包括零件订购界面159b,该零件订购界面159b可操作以启用、调度、发送、接受和/或处理对一个或更多个零件的订购。云连接服务150可选地包括服务器或数据库上的维护信息,该维护信息159c可操作以存储或提供维护日志、时间表、笔记等以及与固定的或可移动的装备相关的其他信息。云连接服务150可选地包括人员数据库159d(例如,可操作以提供和/或接收与在装备上执行操作或维护的人员相关联的信息,诸如姓名、经验水平、训练进度、事件报告、效率、工资等)。
22.参考图2,示意性地示出了示例性固定的骨料加工车间200。车间200可选地与一个或更多个固定的装备控制和检测系统110和/或一个或更多个产品传感器阵列170相关联,
其中一个或更多个传感器阵列170(例如,一个或更多个传感器或其致动器)可与以下段落中描述的车间200(或其部件)的装备的项目中的任何一个或更多个相关联。
23.继续参考图2,在一些实施例中,通过装载机202或其他车辆或设备为车间200提供未经处理的骨料材料。材料最初可选地通过分类器204(例如,诸如格筛进料器等的振动进料器)进行分类。
24.材料可选地通过一个或更多个输送机206(例如,固定的“跳跃”输送机等)在车间200的部件之间传送。一些车间实施例包括用于破碎材料的一个或更多个破碎机(例如,颚式破碎机207、锥形破碎机400、竖直轴冲击破碎机、水平轴冲击破碎机等)。车间200的一些实施例包括用于对骨料材料进行分类的振动筛300(例如,倾斜筛或水平筛)。车间200的一些实施例包括可选地可致动的流动重新定向设备208(例如,滑槽、水槽、刀闸、蝶形阀等),该可致动的流动重新定向设备208用于将材料(例如,干或湿材料)重新定向(例如,选择性地重新定向、部分地重新定向、完全地重新定向等)至车间200的各种部件。车间200的一些实施例包括用于处理(例如,清洁、脱水等)骨料材料的一个或更多个砂螺杆218。车间200的一些实施例包括一个或更多个堆叠输送机500(例如,伸缩输送机、径向堆叠输送机等),该堆叠输送机500用于将骨料材料存储在贮料堆230(例如,锥形贮料堆、肾形贮料堆等)中。车间200的一些实施例包括用于从骨料材料中去除水和/或清洁骨料材料的一个或更多个脱水筛260。车间200的各种装备(例如,振动筛、砂螺杆、脱水筛)的项目可选地包括一个或更多个流体注射设备244(例如,喷射棒、喷射阀等),该流体注射设备244用于将水或其他流体添加(例如,喷射、注射等)到装备的项目和/或由其处理或移动的材料。在一些实施例中,水源240被用于向车间200的一个或更多个装备或部件的项目提供水,例如。通过一个或更多个泵242。车间200可选地包括一个或更多个水力旋流器222或用于分类骨料材料的其他湿分类装备。
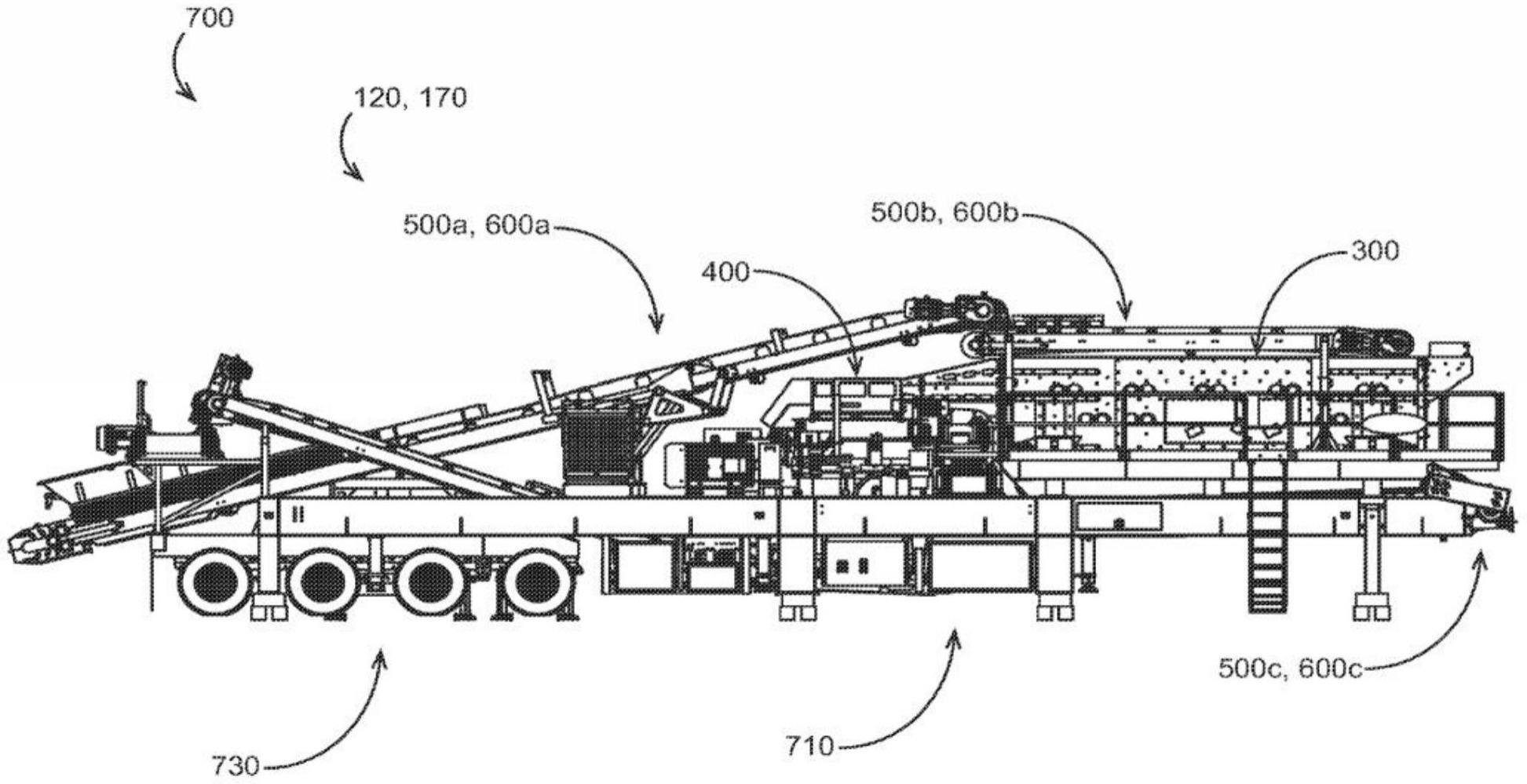
25.参考图7,示出了可移动的或活动式骨料加工车间700的示例性实施例。车间700可选地与一个或更多个可移动的装备控制和检测系统120和/或一个或更多个产品传感器阵列170相关联,其中一个或更多个传感器阵列170(例如,一个或更多个传感器或其致动器)可与以下段落中描述的车间700的装备(或其部件)中的任何一个或更多个相关联。在一些实施例中,可移动的车间700可选地移动(例如,拖曳或驱动)至固定的车间,并且用于加工骨料材料作为固定的车间加工的一部分。
26.继续参考图7,在一些实施例中,车间700可选地包括一个或更多个进料输送机500。车间700可选地包括振动筛300(例如,水平筛等)。在一些实施例中,车间700可选地包括破碎机400(例如,锥形破碎机等),破碎机400可选地设置为接收穿过筛网300的至少一部分材料。在一些实施例中,一个或更多个输送机500b在车间700的部件之间内部移动材料。在一些实施例中,车间700可选地包括一个或更多个出料输送机500c,该出料输送机500c用于将材料从车间700输送到另一装备的项目和/或贮料堆或其他存储位置。车间700的输送机和加工装备可选地支撑在底架710上,该底架710能够可选地在一个或更多个移动性组件730(诸如,轮或轨道)上移动(例如,坑式活动或道路式活动)。
27.继续参考图3,装备控制和监测系统120和/或产品传感器阵列170可选地包括与每个输送机500相关联的一个或更多个输送机控制和监测系统600。装备控制和监测系统120和/或产品传感器阵列170可选地包括破碎机400的控制和监测系统。装备控制和监测系统
120和/或产品传感器阵列170可选地包括屏幕300的控制和监测系统。
28.参考图3,振动分类器300被示出为具有根据多个实施例的装备标准传感器阵列370、控制元件阵列380以及一个或更多个材料传感器390,该材料传感器390可选地支撑在振动筛上或与振动筛分离。
29.振动筛分器300可包括倾斜筛、水平筛、进料器、脱水筛等。振动分类器300可具有一个或更多个分类介质的甲板,该分类介质的甲板包括布料筛、金属筛、板(诸如由聚氨酯或其他材料制成的平板)、格筛条、尖齿等的。
30.在一些实施例中,振动分类器300包括间隔开的侧壁310(例如,310-1、310-2),这些间隔开的侧壁310由多个横向构件325接合而成。一个或更多个分类甲板320(例如,320a、320b、320c)可选地在侧壁之间延伸。每个甲板320可选地支撑一个或更多个分类介质326(例如,布料筛、金属筛、板(诸如,由聚氨酯或其他材料制成的平板)等),在分类器300的振动操作期间,筛下物料通过该一个或更多个分类介质掉落,并且筛上物料越过该一个或更多个分类介质到达分类器300的排出端。
31.分类器300可选地被支撑在(和/或在一些实施例中支撑)一个或更多个轴承轴350上,该轴承轴352可选地具有用于驱动该分类器旋转的偏心重量。一个或更多个轴承轴350可选地包括飞轮354或用于使轴旋转的其他输入。飞轮354或其他输入可选地由驱动器352(诸如电动机)驱动。飞轮354和/或轴承轴350可选地与油壳体330流体连通。
32.分类器300可选地弹性地支撑在多个弹簧360或其他弹性元件上。
33.可选地设置一个或更多个流体注射元件305以将水或其他流体注射(例如,喷射等)到分类器300上(例如,到其上层甲板或其他甲板上)。
34.装备标准传感器阵列370可选地包括一个或更多个动态传感器372(例如,加速度计、三轴加速度计、陀螺仪、振动传感器等),该动态传感器372可选地设置在每个侧壁310上的多个位置处,并且可选地被配置为用于记录分类器300在操作过程中的动态数据(例如,加速度、频率、速度、位置)和/或振荡路径。一对或更多对动态传感器372可选地设置在侧壁310-1、310-2的对应位置处(例如,沿共同的横向延伸轴线和/或水平延伸轴线),使得可以比较动态数据和/或侧壁上对应位置的振荡路径。一个或更多个动态传感器372可选地设置在一个或更多个结构支撑构件304上。一个或更多个能量消耗传感器373可选地被配置为检测与能量消耗有关的操作标准,诸如驱动器352的能量消耗(例如,电流消耗、功率消耗、电压等)。
35.装备标准传感器阵列370可选地包括一个或更多个负载单元374,该负载单元374被设置为至少部分地支撑分类器300的重量。装备标准传感器阵列370可选地包括一个或更多个应变仪371,该应变仪371用于测量分类器300(例如,设置在一个或更多个侧壁310上的应变仪371a、设置在一个或更多个结构支撑构件304上的应变仪371b、设置在一个或更多个横向构件325上的应变仪371c和/或设置在一个或更多个轴承轴350上的应变仪371d)上的应变。
36.装备标准传感器阵列370可选地包括一个或更多个磨损传感器378(例如,感应传感器、运动传感器、光学传感器、电磁传感器等)。在一些实施例中,一个或更多个磨损传感器378设置在一个或更多个分类介质326上或其附近,以便测量介质的磨损程度。
37.装备标准传感器阵列370可选地包括一个或更多个油特性传感器377,在一些实施
例中,该油特性传感器377被设置在油壳体330中和/或与油壳体或被供应至油壳体330和/或该油特性传感器377与油壳体或供应到油壳体330或轴承轴350的油流体连通。该油特性传感器可选地包括油温度传感器377a、油液位传感器377b(例如,超声波或光学传感器)、油颗粒监测器377c和/或油水分传感器377d。
38.装备标准传感器阵列370可选地包括一个或更多个轴承操作特性传感器379,该轴承操作特性传感器379可选地被设置为测量支撑一个或更多个轴承轴350的一个或更多个轴承的操作特性。轴承操作特性传感器379可选地包括振动传感器379a、温度传感器379b和/或轴承磨损传感器379c。在一些实施例中,轴承操作特性传感器379包括可从skf获得的enlightcollectionimx-1轴承监测系统。
39.一个或更多个材料传感器390可选地包括一个或更多个传感器(例如,相机、光学传感器、高度传感器、温度传感器、距离传感器、uv传感器、超声波发射器/接收器等),该传感器可被配置为用于评估(例如,确定量、高度、重量、密度、分离、水分、含水量、粒度分布、温度、颜色或其他特性)传递到分类器300上、上方、通过或离开分类器300的材料(例如,上甲板、下甲板、中间甲板、或其其他甲板)。材料传感器390可设置为远离分类器300和/或在分类器300上(例如,在其侧壁上并朝向甲板320上的骨料材料定向)。多个传感器390可被配置为用于感测和/或表征在分类器300上或其附近的不同位置上的材料(例如,在被沉积到分类器300上之前,当在分类器300的上甲板上时,当在分类器300的下甲板上时,在通过分类器300的一个或更多个甲板下降之后,在分类器的进入端处,在分类器的排放端处,在从分类器的排放端被沉积离开之后等)。
40.控制元件阵列380可选地包括一个或更多个施加控制器387(例如,流动控制阀、截止阀、可变速率泵等),该施加控制器387用于修改经由一个或更多个流体注射元件305的流体施加(例如,水施加)的速率。在一些实施例中,多个单独控制的控制器386(例如,注射阀、喷射阀等)排列在流体注射器元件305的长度上,并可选地定向成将水沉积到分类器300上。
41.控制元件阵列380可选地包括一个或更多个致动器,该致动器用于修改一个或更多个甲板320和/或整个分类器300的角度。
42.控制元件阵列380可选地包括一个或更多个驱动控制器382,该驱动控制器382用于修改驱动器352的速度、频率或其他操作特性和/或用于选择性地打开或关闭驱动器352。
43.参考图12,动态传感器372的示例性实施例被示出为传感器模块1200。在一些实施例中,传感器模块1200包括壳体1210(例如,塑料壳体),该壳体1210可选地至少部分地封闭该传感器模块的操作部件。壳体1210可以是任何形状(例如,矩形、椭圆形、圆形等)。在一些实施例中,壳体1210至少部分地填充有树脂填充物fr或支撑(例如,至少部分地悬挂)传感器模块的部件的其他填充物。传感器模块1200可选地包括用于将传感器模块可移除地附接至侧壁或其他结构的一个或更多个磁体1270(例如,1270a、1270b)。应当理解,传感器模块1200因此可在不使用紧固件或工具的情况下可移除地附接至振动筛上的选定位置。传感器模块1200可选地包括与电路板1250电通信的一个或更多个电池1260(或者在一些实施例中,能量存储装置(诸如一个或更多个电容器等))。在一些实施例中,电池1260由振动动力发生器(例如,压电发生器、电磁发生器等)替换或充电。电路板1250可选地包括加速度计1230(例如,3轴加速度计),该加速度计1230被配置为生成与传感器模块1200的加速度相关的一个或更多个信号。电路板1250可选地包括用于处理来自加速度计1230的信号以便生成
经处理的加速度数据的处理器1240。电路板1250可选地与天线1220进行数据通信(例如,电气、电子、无线或无线电通信),用于将信息(例如,经处理的加速度数据和/或信号)传输到远离传感器模块的接收器。在其他实施例中,不同的装置或系统可用于向远离传感器模块的接收器传输信息。
44.参考图13,用户界面1300(例如,显示屏幕、浏览器页面、移动应用显示等)可选地显示带数据值的振动筛的表示1310(例如,不同位置处的相对侧壁之间的冲程角度和冲程长度的差)叠加在振动筛上的相关联位置1312、1314上。在一些实施例中,表格1320显示振动筛上的各个位置的数据(例如,行程角度和长度的差异)。参考图14,另一用户界面1400可选地显示轨迹图1410,该轨迹图1410显示并叠加左侧壁和右侧壁上的相关位置的振荡轨迹。在一些实施例中,表1420显示在左侧壁和右侧壁上的相关联位置处(例如,沿图14中所示的x、y和z方向)测量的其他数据(例如,加速度、频率、位移等)。
45.参考图4,破碎机400被示出为具有装备标准传感器470的阵列、控制元件480的阵列以及一个或更多个材料传感器490,该破碎机400可选地支撑在根据各种实施例的振动筛上或与振动筛分离。尽管破碎机400被图示为锥形破碎机,但是在各种实施例中,本文描述的装备标准传感器、控制元件或材料传感器中的一个或更多个可结合在其他破碎装备中,该破碎装备包括颚式破碎机、冲击器(例如,竖直轴或水平轴冲击器)、回转破碎机等。
46.继续参考图4,破碎机400可选地包括进料入口区域401,骨料材料从该进料入口区域410在碗状件402与头部404之间通过,用于在其间破碎。在一些实施例中,头部404由于可旋转地支撑在壳体405中的轴406(例如,被偏心部408包围的轴)的旋转而至少部分地在碗状件402内回转。壳体405可选地包括排放开口409,该排放开口409用于将至少部分破碎的材料排放到例如皮带b上。在一些实施例中,轴406由驱动组件410驱动,该驱动组件410可选地包括飞轮412和具有输出齿轮416的副轴414,该输出齿轮416被配置为驱动轴406。润滑系统430可选地包括一个或更多个润滑剂管道432,该润滑剂管道432被配置为将润滑剂(例如,油等)供应到破碎机的一个或更多个部件(例如,头轴、头部等)。破碎间隙调节系统440可选地提供用于调节破碎间隙(例如,头部与碗状件之间的距离、近侧设定等),诸如通过由马达或其他机构在竖直调节螺纹内旋转该碗状件来调节破碎间隙。临时救助系统420(例如,一个或更多个液压缸)可选地提供用于在发生临时事件(例如,头部和碗状件之间的未破碎材料、头部的卡住等)的情况下临时提升碗状件。
47.装备标准传感器阵列470可选地包括一个或更多个动态传感器472a(例如,加速度计、三轴加速度计、陀螺仪、振动传感器等),该动态传感器472a可选地设置在一个或更多个位置处(例如,在头轴、头部、碗状件、壳体、副轴、飞轮等上),并且可选地被配置为用于在操作过程中记录动态数据(例如,加速度、频率、速度、位置)。一个或更多个能量消耗传感器471可选地被配置为检测与能量消耗有关的操作标准,诸如驱动器482的能量消耗(例如,电流消耗、功率消耗、电压等)。
48.装备标准传感器阵列470可选地包括一个或更多个应变仪472b,该应变仪472b用于测量破碎机400的一个或更多个部件上的应变(例如,设置在头轴、头部、碗状件、壳体、副轴、飞轮等上的应变仪472b)。
49.装备标准传感器阵列470可选地包括一个或更多个应变仪472c,该应变仪472c用于测量破碎机400的一个或更多个部件的温度(例如,设置在头轴、头部、碗状件、壳体、副
轴、飞轮等上的应变仪472c)。
50.装备标准传感器阵列470可选地包括一个或更多个磨损传感器476(例如,感应式传感器、运动传感器、光学传感器、电磁传感器等)。在一些实施例中,一个或更多个磨损传感器378设置在一个或更多个可消耗衬垫(例如,碗状件衬垫等)或其他磨损部件上或附近,以便测量衬垫的磨损程度。
51.装备标准传感器阵列470可选地包括一个或更多个润滑剂特性传感器474(例如,流量传感器474a、粘度传感器474b、温度传感器474c等),该润滑剂特性传感器474与润滑系统430(例如,其一个或更多个管道)处于流体连通。
52.装备标准传感器阵列470可选地包括一个或更多个操作特性传感器479,该操作特性传感器479可选地被设置为测量支撑破碎机的一个或更多个轴的一个或更多个衬套或轴承的操作特性。该操作特性传感器479可选地包括振动传感器、温度传感器和/或轴承磨损传感器。
53.一个或更多个材料传感器490可选地包括一个或更多个传感器(例如,相机、光学传感器、高度传感器、温度传感器、距离传感器、uv传感器、超声波发射器/接收器等),该传感器可被配置为用于评估(例如,确定量、高度、重量、密度、分离、水分、水含量、粒度分布、温度、颜色、或其他特性)传递到破碎机400上、上方、通过或离开破碎机400的材料(例如,在上甲板、下甲板、中甲板、或其其他甲板)。材料传感器390可设置为远离分类器300和/或在分类器300上。多个传感器490可被配置为用于感测和/或表征分类器300上或附近的不同位置上的材料(例如,传感器490a可感测进料入口中的材料和/或传感器490b可感测排放到皮带b上的材料或其他位置等。)
54.控制元件阵列480可选地包括一个或更多个驱动控制器482,该驱动控制器482被配置为用于修改破碎机的速度、频率或其他操作特性和/或被配置为用于选择性地打开或关闭破碎机。
55.控制元件阵列480可选地包括一个或更多个临时救助控制器486,该临时救助控制器486用于选择性地致动临时救助系统420(例如,选择性地延伸一个或更多个临时救助缸等)。
56.控制元件阵列480可选地包括一个或更多个破碎间隙控制器484,该破碎间隙控制器484用于选择性地致动破碎间隙调整系统440(例如,选择性地转动一个或更多个输入齿轮以便在竖直调整螺纹内转动碗状件等)。
57.参考图5和图6,结合了输送机控制和监测系统600的输送机500的实施例。
58.输送机500可选地包括环形带b,该环形带b可操作地支撑在头部滑轮580、多个惰轮组件510以及尾滑轮560上。材料m沿输送方向dc在皮带b上传送。头部滑轮580可选地是从动滑轮。头部滑轮580可选地支撑在轴582上。尾滑轮560可选地支撑在轴562上。每个惰轮组件510可选地支撑在一对纵向延伸的轨道502a、502b上。
59.一个或更多个惰轮组件510可选地包括如图6所示的槽形惰轮组件。该槽形惰轮组件具有大致水平的中心惰轮520b和成角度的翼惰轮520a、520c。每个翼惰轮520a、520c可选地滚动地支撑在外立管512和内高位支撑件(innerperchsupport)524上。中心惰轮520b可选地滚动地支撑在高位支撑件524a、524b上。立管512和高位支撑件524可选地支撑在横向构件504上。每个惰轮520可选地支撑在轴525上。
60.输送机控制和监测系统600可选地包括与一个或更多个惰轮520(例如,翼惰轮、中心惰轮等)相关联的多个传感器。在一些实施例中,该传感器包括一个或更多个轴承温度传感器622、一个或更多个旋转传感器624、负载传感器626(例如,测力传感器或应变仪)和内部温度传感器628;该轴承温度传感器622被配置为用于测量支撑该惰轮的轴承的温度,该旋转传感器624被配置为用于测量该惰轮的旋转和/或旋转速度,该负载传感器626可选地被安装到轴525上并被配置为用于测量该轴525上的负载,该内部温度传感器628被配置为用于测量该惰轮的内表面和/或体积的温度。
61.系统600可选地包括负载传感器662,该负载传感器662被配置和设置为用于测量轴562上的负载。系统600可选地包括负载传感器682,该负载传感器682被配置和设置为用于测量轴582上的负载。系统600可选地包括一个或更多个嵌入式传感器664(例如,测力传感器、温度传感器等),该嵌入式传感器664嵌入在一个或更多个滑轮560、580上安装的滑轮中。
62.系统600可选地包括产品传感器阵列。系统600的产品传感器阵列可选地包括材料传感器690,该材料传感器690被设置和配置为用于检测一个或更多个材料特性(例如,皮带b的至少一部分上的材料m的量、存在、类型、密度、高度、宽度、垛形状和/或垛分离(pilesegregation))。系统600的产品传感器阵列可选地包括刻度尺610(例如,皮带刻度尺),该刻度尺610可选地设置为至少部分地支撑惰轮组件510的重量和/或可选地配置为测量皮带b的至少一部分上的材料m的重量。
63.系统600可选地包括控制元件阵列,该控制元件阵列具有用于修改输送机500的操作标准的一个或更多个控制器。控制器可选地包括马达680(例如,电动机、内部马达、外部马达等),马达680具有可变速度,并且可操作地联接滑轮580以驱动滑轮580。
64.系统600(例如,一个或更多个传感器和/或其控制元件)可选地是系统100的部件和/或与系统100进行数据通信,使得系统600的传感器和/或控制器与计算装置100的计算装置和/或网络进行数据通信。
65.具有输送机控制和监测系统600的输送机500可被设置为用于将输入材料运输到一个或更多个装备的项目(例如,破碎机、筛网等,诸如本文描述的那些)中,可选地从另一装备的项目输送。具有输送机控制和监测系统600的输送机500可被设置为将输出材料输送到一个或更多个装备的项目(例如,破碎机、筛网等,如本文描述的那些)中,可选地输送到另一装备的项目或贮料堆或其他存储位置。
66.参考图8,示出了示例性图形用户界面显示器800。该显示器800可选地与系统100的一个或更多个元件数据通信,用于显示来自系统100的信息和/或为系统100收集用户输入。显示器800可选地显示以下中的一个或更多个:测量802(例如,装备测量、产品测量等);可视化804(例如,随时间可视化的和/或针对一个或更多个其他测量可视化的一个或更多个测量802的可视化);警报806(例如,指示一个或更多个测量值已经超过相关联的量阈值和/或趋势阈值);故障预测808(例如,指示装备的一个或更多个零件或项目被预测为在时间和/或操作时间内发生故障);产品数量指示810(例如,指示由装备和/或总车间的项目生产的产品的重量、体积、吨/小时等的量);产品质量指示812(例如,指示由装备和/或总车间的项目生产的产品的湿度、温度、分级、材料规格满意度、材料含量等);经济收益指示814(例如,指示随时间和/或每单位时间来自车间的操作的净经济收益、产品收入等);维护推
荐816(例如,指示修理或更换一个或更多个部件的警报或预定或推荐时间);操作推荐818(例如,指示一个或更多个操作标准的推荐变化);资产数据820(例如,装备和/或车间的项目的一个或更多个位置、操作时间、燃料消耗、燃料效率、维护日志、生产效率等);资产地图822(例如,指示装备和/或车间的多个项目的一个或更多个位置);资源使用824(例如,指示装备和/或车间的一个或更多个项目所使用的能量、电力、电力、燃料等的量);和/或维护时间表826(例如,由系统100推荐和/或由操作者安排的一个或更多个维护动作的推荐时间)。
67.参考图9,示出了操作系统100的一个或更多个实施例的方法900。在步骤910中,系统100被操作(例如,通过命令一个或更多个驱动器来操作各个装备)。在步骤920中,系统100可选地改变一个或更多个操作特性(例如,如由操作者所指示的,如由系统100出于操作目的所确定的和/或为了生成系统响应数据,诸如通过在系统的生产性操作的范围内以多个速度、频率、角度、冲程、近侧设定等进行操作)。在步骤930中,系统100在系统操作期间可选地从装备和/或产品传感器收集数据(例如,在步骤920中的每个改变的操作特性处)。在步骤940中,系统100可选地用算法逻辑和/或人工智能逻辑处理数据。在步骤950中,系统100可选地估计(例如,使用算法逻辑和/或人工智能逻辑)装备的零件和/或项的操作故障(例如,故障时间、故障操作时间、将引起故障的操作特性等)。在步骤960中,系统100可选地通过改变(例如,改变使用算法逻辑和/或人工智能逻辑确定的量)一个或更多个操作特性(例如,减小速度或频率和/或改变行程、近侧设定等)来延迟估计的故障。在一些实施例中,系统100通过停止一个或更多个装备的项操作来延迟所估计的故障。在步骤970中,系统100可选地显示与估计的故障有关的警告。在步骤980中,系统100可选地显示维护动作推荐(例如,包括预测发生故障的装备的项、诸如预测发生故障的零件的零件号的标识、推荐的更换时间、推荐的更换操作时间、零件订购细节、零件价格、零件更换或修理时间和/或成本、前述维护推荐的估计的附加成本等中的一个或更多个)。维护动作推荐可选地使用算法逻辑和/或人工智能逻辑来确定。
68.在本文(例如,方法900)所描述的方法的一些实施例中,预测了衬套失效(例如,颚式破碎机衬套、锥形破碎机衬套、输送机惰轮衬套等)。在一些实施例中,基于衬套温度和/或衬套温度趋势来预测衬套故障。在一些实施例中,基于衬套的“滑行时间”(例如,在装备不再被被供电之后达到0rpm所需的时间)和/或滑行时间趋势来预测衬套故障。在一些实施例中,进入和离开该衬套的油温度之间的油温差(或其趋势)被用来预测该衬套失效。
69.在本文(例如,方法900)所描述的方法的一些实施例中,特定天气条件(例如,降水、可能的降水等)的存在触发针对特定装备的警报。
70.在本文(例如,方法900)所描述的方法的一些实施例中,可查阅高度和/或环境温度以便在强加关机或警报状况之前调整一个或更多个装备的项目所允许的最大功率消耗。
71.在本文(例如,方法900)所描述的方法的一些实施例中,测量底架或结构的振动,并将其与阈值(例如,在安全手册、保修文件等中反映的阈值)进行比较以确定是否已经达到关机或警报状况。
72.在本文(例如,方法900)所描述的方法的一些实施例中,查阅屏幕介质(例如,具有颜色编码的磨损层)的一个或更多个图像以便预测屏幕介质的失效或不可接受的磨损状况。
73.在本文(例如,方法900)所描述的方法的一些实施例中,通过比较来自振动筛的两
个或更多个区域的测力传感器或其他重量信息和/或使用振动筛甲板的顶部上的材料的一个或更多个图像来确定过载或不均匀的进料分布。
74.在本文(例如,方法900)所描述的方法的一些实施例中,通过比较来自振动筛的两个或更多个区域的测力传感器或其他重量信息和/或使用振动筛板的顶部上的材料的一个或更多个图像来确定过载或不均匀的进料分布。过载或不均匀的进料分布可报告为警报和/或量化并报告为分布均匀性评分或可接受的分布负载百分比。
75.参考图10,示出了操作系统100的一个或更多个实施例的方法1000。在步骤1010中,系统100被操作(例如,通过命令一个或更多个驱动器来操作各个装备)。在步骤1020中,系统100可选地改变一个或更多个操作特性(例如,如由操作者所指示的,如由系统100出于操作目的而确定的和/或为了生成系统响应数据,诸如通过在用于系统的生产性操作的范围内的多个速度、频率、角度、冲程、近侧设定等操作)。在步骤1030中,系统100在系统操作期间(例如,在步骤1020中的每个改变的操作特性处)可选地从装备和/或产品传感器收集数据。在步骤1040中,系统100可选地利用算法逻辑和/或人工智能逻辑来处理数据。在步骤1050中,系统100可选地识别(例如,使用算法逻辑和/或人工智能逻辑)一个或更多个操作特性变化,以便增加系统100的经济收益(例如,总体材料生产、总体货币产量、产品收入等)。在一些实施例中,步骤1050可选地部分地使用产品商品价格、资源成本等来执行。在步骤1060中,系统100可选地推荐(例如,通过向操作员显示警报)和/或执行(例如,通过发送控制信号)步骤1050中的所识别的操作特性变化。
76.在本文(例如,方法1000)所描述的方法的一些实施例中,使用可变频率驱动器、致动器等致动一个或更多个操作特性:破碎机近侧设定、副轴速度、和/或输送机、进料机或将材料进给到破碎机的其他装置的进给速率。
77.在本文(例如,方法1000)所描述的方法的一些实施例中,对弹性地支撑振动筛的一个或更多个弹簧的反冲速率进行调节,以便改进该筛的振动或负载平衡。在一些这种实施例中,邻接弹簧的楔或其他装置可以前进或缩回,以便修改反冲速率。在其他这种实施例中,空气弹簧的压力可通过阀或其他装置来调节,以便修改反冲速率。
78.在本文(例如,方法1000)所描述的方法的一些实施例中,临时增加振动筛频率,以便从振动筛的一个或更多个甲板上清除材料。在本文所述方法(例如,方法1000)的一些实施例中,振动筛甲板通过致动拍打器杆或被配置为从甲板移除材料的其他清除设备来清洁。在实施例中,通过确定由筛网生成的一个或更多个产品的生产速率低于与筛网的当前进给速率和/或振动频率相关联的阈值来发起频率增加或清除设备致动。
79.参考图11,展示了操作系统100的一个或更多个实施例的方法1100。在步骤1110中,系统100可选地操作多个(例如,第一和第二)装备(例如,输送机、破碎机、振动筛等中的两个或更多个)的项目。在步骤1120中,系统100可选地从与第一装备的项目的输出相关联的产品传感器收集第一数据。在步骤1120中,系统100可选地用算法逻辑和/或人工智能逻辑处理所收集的第一数据。在步骤1140中,系统100可选地在接受范围内(例如,在可存储在存储器中或由操作员输入的速度、频率、冲程、近侧设定等的接受范围内)修改第一装备的项目的一个或更多个操作特性。在步骤1150中,从与第一准备的项目的输出相关联的产品传感器收集第二数据。在步骤1160中,系统100可选地确定(例如,使用算法逻辑和/或人工智能逻辑)与第一装备的项目相关联的生产变化(例如,产品数量、每个时间的产品数量、每
个操作周期的产品数量、产品数量等)。在步骤1170中,如果生产变化低于期望阈值(例如,百分比变化、绝对量等,该阈值可存储在存储器中或由操作员输入),则系统100可选地修改(例如,通过使用算法逻辑和/或人工智能逻辑确定的量)第二和装备的项目的操作特性(例如,以便增加生产变化等)。
80.虽然以上已描述了不同实施例,但所公开的实施例的细节和特征不旨在是限制性的,因为许多变化和修改对于本领域技术人员将是显而易见的。因此,本公开的范围旨在宽泛地解释,并包括所附权利要求及其等同物的范围和精神内的所有变化和修改。例如,针对一个实施例描述的任何特征可在任何其他实施例中使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1