一种基于BPSOGWO-KNN的下肢假肢运动意图识别算法
一种基于bpsogwo-knn的下肢假肢运动意图识别算法
技术领域
1.本发明属模式识别技术领域,具体涉及一种基于bpsogwo-knn的下肢假肢运动意图识别算法。
背景技术:
2.下肢截肢是一个不断增加的问题,需要先进的技术来帮助残疾人恢复在各种地形下的自然步态功能;大多数商业上可用的假肢解决方案是被动的,简单的机制使它们易于在临床上实施,但是也存在一些问题,例如截肢患者会比正常人消耗更多的能量,造成代偿运动,对其他未受伤的组织或部位造成新的损伤;动力假肢会减少补偿策略,并增加自己选择的步行速度和舒适步行速度的范围,但在这种设备被广泛采用之前,还需要更先进和直观的控制策略,准确判断下肢截肢患者的运动意图尤为重要。
3.在水平地面、斜坡和楼梯行走中,腿部生物力学变化很大,需要准确和及时地预测运动状态的变化;在研究型假肢中,大多使用机器学习算法进行人体意图识别,嵌入在假肢上的传感器采集数据,从原始数据中筛选出更好的数据特征,以提升模型的训练效果;常使用群体智能优化算法进行特征选择,群体智能优化算法主要模拟昆虫、兽群、鸟群和鱼群的群体行为,群体中的每个成员通过学习它自身的经验和其他成员的经验来不断地改变搜索的方向;通过选择适当的群体成员数和种群迭代次数,能够取得使算法获得较高准确率的最优特征解。在众多群体智能优化算法中,粒子群优化算法(particle swarm optimization,pso)由于算法简单容易实现并且没有许多参数的调节。被广泛应用于函数优化、神经网络训练、模糊系统控制以及其他遗传算法的应用领域。针对粒子群优化算法有陷入局部最优的缺点,使用灰狼算法(grey wolf optimizer,gwo)改进粒子群优化算法。筛选出的每一维数据特征对于算法的贡献程度不同,需要通过训练,赋予每一维数据特征不同的权重值,以提高算法预测的精度。可使用灵敏度法和智能优化算法,其中生物地理学优化算法(biogeography-based optimization,bbo)具有良好的收敛性和稳定性,能够获得泛化性良好的特征权重解向量。
4.由于已有算法的种种缺陷,在实际应用中效果不够理想,本发明提出使用群体智能优化算法进行特征筛选,并再次使用智能优化算法对所选特征进行权重训练,提供了一种基于bpsogwo-knn的下肢假肢运动识别算法。
技术实现要素:
5.本发明的目的在于提供一种基于bpsogwo-knn的下肢假肢运动意图识别算法,通过特征筛选及特征权值优化及改进knn算法结构的方式提高截肢患者运动意图识别分类的准确率。
6.一种基于bpsogwo-knn的下肢假肢运动意图识别算法,包括下列步骤:
7.1.1.获取膝关节假肢中各传感器采集到的动作数据,包括下列步骤:
8.1.1.1.使用放置在膝关节假肢上的膝关节角度传感器、称重传感器和imu传感器
采集8名残疾人受试者进行慢速水平行走、正常速水平行走、快速水平行走、上坡、下坡、坐、站、上楼和下楼运动时的数据;采集数据前,每位受试者需穿戴假肢进行十小时适应性训练;8名残疾人受试者中包含一名女性受试者;
9.1.1.2.传感器采集数据包括:膝关节角度、地面反作用力、imu传感器x轴加速度、imu传感器y轴加速度、imu传感器z轴加速度、imu传感器x轴角速度、imu传感器y轴角速度、imu传感器z轴角速度数据;
10.1.1.3.预处理:对采集数据进行去噪,去除异常数据,并对正常数据加上分类标签;
11.1.1.4.采集每个步态周期中称重传感器值刚大于16n开始200ms时间窗传感器数据,提取时间窗内各维数据的7种时域特征值,7种时域特征值包括最小值、最大值、均值、标准差、起始值、结束值、峰峰值;
12.1.2.利用bpsogwo-knn算法进行特征选择,将特征选择设计成一个二元问题,选择该特征,则该特征值置1,反之置0,包括下列步骤:
13.1.2.1.psogwo的基本思想是综合pso优化器和gwo优化器的优势,对原速度公式进行修改,在搜索空间中不断更新三个候选解的位置;
14.1.2.1.1.gwo算法是模拟自然界中灰狼群体的社会等级机制和捕猎行为而衍生出的一种新型群体智能优化算法,在gwo算法中,每只灰狼代表种群中1个候选解,其中,群体中最优解称为α,次最优解称为β,第三最优解称为δ,其他解均称为ω;在算法进化过程中,α,β和δ负责定位猎物的位置,并引导其他个体完成靠近、包围和攻击等行为,最终达到找到最优解的目的;包围猎物公式为:
[0015][0016][0017]
其中:t是当前的迭代代数,和是系数向量,和分别是猎物的位置向量和灰狼的位置向量,为灰狼与猎物间的距离;
[0018]
和定义为:
[0019][0020][0021][0022]
其中:是收敛因子,随着迭代次数从2线性减小到0,和是属于[0,1]之间的随机向量,ter为优化器总迭代次数;
[0023]
1.2.1.2.pso算法是以单一粒子作为鸟类族群之中的单一个体,于算法中赋予该粒子(个体)拥有记忆性,并能够透过与粒子群体中的其他粒子之间的互动而寻求到最适解;粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向;每个粒子单独搜寻的最优解叫做个体极值,粒子群中最优的个体极值作为当前全局最优解;不断迭代,更新速度和位置;最终得到满足终止条件的最优解;使用下列公式更新位置和速度矢
量:
[0024][0025][0026]
其中:是粒子的当前速度,是粒子的更新速度,是粒子的当前位置,是粒子的更新位置,c1和c2是学习因子,通常c1=c2=2,r1和r2为介于(0,1)之间的随机数,表示第i个变量的第k维个体极值,gbest表示第k维全局最优解;
[0027]
1.2.1.3.psogwo算法融合pso算法和gwo算法的优势,实现提高优化器的寻优能力;在psogwo算法中,前三个候选解的位置通过如下方程在搜索空间中更新:
[0028][0029][0030][0031]
其中:和是系数向量,和分别为当前种群中α、β、δ三条狼的位置向量,表示灰狼的位置向量,ω为惯性因子,和分别表示当前候选灰狼与最优三条狼之间的距离;
[0032]
粒子速度和位置的更新公式如下:
[0033][0034][0035]
其中:ω为惯性因子,c1、c2和c3是学习因子,r1、r2和r3为介于(0,1)之间的随机数,x1、x2和x3为更新的三个最优解;
[0036]
1.2.2.特征选择本质上是一个二元问题,bpsogwo算法是psogwo算法的二进制版本,用来寻找最佳特征子集;每一只灰狼的位置都通过三个最优解位置进行更新,二进制空间下,位置更新公式为:
[0037][0038]
其中:为在d维下,第t次迭代后的二进制更新的位置,rand是从[0,1]之间均匀分布中得到的随机数,sigmoid(x)定义为:
[0039][0040]
x1、x2、x3更新和计算公式如下:
[0041]
[0042][0043][0044]
是在第d维的位置向量α狼、β狼和δ狼的位置向量,是在第d维下的二进制步长,定义如下:
[0045][0046]
其中:rand是从[0,1]之间均匀分布中得到的随机数,d表示维度,是d维的连续值,计算公式如下:
[0047][0048]
其中:是系数,表示当前候选灰狼与最优三条狼之间的距离;
[0049]
1.2.3.bpsogwo-knn算法相关参数为:粒子规模为30,最大迭代次数为500次等;
[0050]
1.2.4.定义bpsogwo-knn算法中的适应度函数为:
[0051][0052]
其中:参数α=0.99;参数β=1-α=0.01;ρr(d)表示knn分类器的错误率;s|为选定的特性子集中特征数;|t|为数据集中的特征总数;
[0053]
1.3.使用bbo算法,对knn分类器中的最近邻居值k和bpsogwo-knn算法选择出的最优特征子集中的特征权重进行优化训练,包括下列步骤:
[0054]
1.3.1.bbo算法将优化问题的每个解看成一个栖息地;解的适应度越高,表示栖息地拥有的物种越多,其迁出率就越高、迁入率就越低;反之,解的适应度越低,其对应的迁出率越低、迁入率越高;通过模拟生物地理学中的迁移和变异过程来对种群进行不断演化,从而求解优化问题;设置bbo算法相关参数,物种数量为100,迭代次数为500次,为了获得有意义的统计结果,对算法执行10次的独立运行;
[0055]
1.3.2.在bbo算法中,物种的维数为m+1,m为bpsogwo-knn算法选择出的最优特征子集中的特征个数;
[0056]
1.3.3.定义bbo算法中的适应度函数为knn分类器的错误样本数;
[0057]
1.3.4.使用bbo算法迭代500次中,适应度函数值最小的那组物种解,作为knn分类器的最近邻居值k和各特征的权重值;
[0058]
1.4.使用改进加权knn分类算法,进行慢速水平行走、正常速水平行走、快速水平行走、上坡、下坡、坐、站、上楼和下楼九种运动状态的区分,包括下列步骤:
[0059]
1.4.1.九种运动状态数据按照相同比例组成输入分类器数据集;
[0060]
1.4.2.输入分类器数据由bpsogwo-knn算法选择出特征构成,各特征的权重值由1.3.4中bbo算法确定;
[0061]
1.4.3.对输入分类器数据进行min-max标准化,使用欧式距离作为改进加权knn算法中的距离度量,最近邻居值k由1.3.4中bbo算法确定;
[0062]
1.4.4.改进knn分类算法为:每一种运动状态为一种分类xi,在每一个类中找到距离测试样本距离最近的k个近邻计算出这k个近邻距离测试样本的均值为mi,如果mj为m={m1,m2...mi}中数值最小的,则测试样本属于xj类;使用改进加权knn算法计算输入分类器数据集的分类准确率;
[0063]
步骤1.1.1.所述的膝关节假肢上的膝关节角度传感器、称重传感器和imu传感器的采样频率均为100hz。
[0064]
步骤1.1.4.所述的步态周期根据足与地面有无接触分为支撑相和摆动相,当足与地面有接触时为支撑相,在支撑相构造人体意图分类器,以称重传感器值大于16n开始,采集200ms数据,提取特征值构建数据集。
[0065]
步骤1.4.4.所述的改进加权knn算法计算分类准确率是通过10折交叉验证,将数据集分成十份,轮流将其中9份作为训练数据,1份作为测试数据进行试验,10次结果的正确率的平均值作为对算法精度的估计。
[0066]
本发明的有益效果在于:
[0067]
本发明基于bpsogwo-knn的下肢假肢运动意图识别算法,能实现对截肢者运动意图进行有效判别:提出一种bpsogwo-knn的下肢假肢运动意图识别算法;由于对传感器数据进行特征提取时,会存在一些冗余特征,增加分类器计算负担,故提出使用bpsogwo-knn算法进行特征选择;由于knn算法对每维特征都是同样看待,但实际上每维特征的贡献程度并不相同,故使用bbo算法,对knn分类器中的最近邻居值k和bpsogwo-knn算法选择出的最优特征子集中的特征权重进行优化训练;改进knn算法,通过比较每种分类类别下到目标最近的k个邻居值的距离均值大小,进行运动模式识别,实现提高算法准确率的目的。
附图说明
[0068]
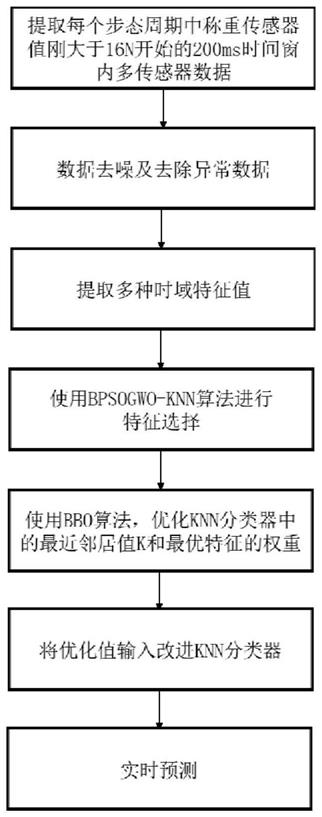
图1为基于bpsogwo-knn的下肢假肢运动意图识别算法流程图;
[0069]
图2为gwo算法寻优迭代逻辑图;
[0070]
图3为本发明中改进knn算法原理示意图。
具体实施方式
[0071]
如图1所示,一种基于bpsogwo-knn的下肢假肢运动意图识别算法,该方法包括下列步骤:
[0072]
1.1.获取膝关节假肢中各传感器采集到的动作数据,包括下列步骤:
[0073]
1.1.1.使用放置在膝关节假肢上的膝关节角度传感器、称重传感器和imu传感器采集8名残疾人受试者进行慢速水平行走、正常速水平行走、快速水平行走、上坡、下坡、坐、站、上楼和下楼运动时的数据;采集数据前,每位受试者需穿戴假肢进行十小时适应性训练;8名残疾人受试者中包含一名女性受试者;
[0074]
1.1.2.传感器采集数据包括:膝关节角度、地面反作用力、imu传感器x轴加速度、imu传感器y轴加速度、imu传感器z轴加速度、imu传感器x轴角速度、imu传感器y轴角速度、imu传感器z轴角速度数据;
[0075]
1.1.3.预处理:对采集数据进行去噪,去除异常数据,并对正常数据加上分类标签;
[0076]
1.1.4.采集每个步态周期中称重传感器值刚大于16n开始200ms时间窗传感器数据,提取时间窗内各维数据的7种时域特征值,7种时域特征值包括最小值、最大值、均值、标准差、起始值、结束值、峰峰值;
[0077]
2.利用bpsogwo-knn算法进行特征选择,将特征选择设计成一个二元问题,选择该特征,则该特征值置1,反之置0,包括下列步骤:
[0078]
2.1.psogwo的基本思想是综合pso优化器和gwo优化器的优势,对原速度公式进行修改,在搜索空间中不断更新三个候选解的位置;
[0079]
2.1.1.如图2所示,gwo算法是模拟自然界中灰狼群体的社会等级机制和捕猎行为而衍生出的一种新型群体智能优化算法,在gwo算法中,每只灰狼代表种群中1个候选解,其中,群体中最优解称为α,次最优解称为β,第三最优解称为δ,其他解均称为ω;在算法进化过程中,α,β和δ负责定位猎物的位置,并引导其他个体完成靠近、包围和攻击等行为,最终达到找到最优解的目的,具体包括下列步骤:
[0080]
包围猎物公式为:
[0081][0082][0083]
其中:t是当前的迭代代数,和是系数向量,和分别是猎物的位置向量和灰狼的位置向量,为灰狼与猎物间的距离;
[0084]
和定义为:
[0085][0086][0087][0088]
其中:是收敛因子,随着迭代次数从2线性减小到0,,和是属于[0,1]之间的随机向量,ter为优化器总迭代次数;
[0089]
2.1.2.pso算法是以单一粒子来做为鸟类族群之中的单一个体,于算法中赋予该粒子(个体)拥有记忆性,并能够透过与粒子群体中的其他粒子之间的互动而寻求到最适解;粒子仅具有两个属性:速度和位置,速度代表移动的快慢,位置代表移动的方向;每个粒子单独搜寻的最优解叫做个体极值,粒子群中最优的个体极值作为当前全局最优解;不断迭代,更新速度和位置;最终得到满足终止条件的最优解;使用下列公式更新位置和速度矢量:
[0090][0091][0092]
其中:是粒子的当前速度,是粒子的更新速度,是粒子的当前位置,是
粒子的更新位置,c1和c2是学习因子,通常c1=c2=2,r1和r2为介于(0,1)之间的随机数,表示第i个变量的第k维个体极值,gbest表示第k维全局最优解;
[0093]
2.1.3.psogwo算法融合pso算法和gwo算法的优势,实现提高优化器的寻优能力;在psogwo算法中,前三个候选解的位置通过如下方程在搜索空间中更新:
[0094][0095][0096][0097]
其中:和是系数向量,和分别为当前种群中α、β、δ三条狼的位置向量,表示灰狼的位置向量,ω为惯性因子,和分别表示当前候选灰狼与最优三条狼之间的距离;
[0098]
粒子速度和位置的更新公式如下:
[0099][0100][0101]
其中:ω为惯性因子,c1、c2和c3是学习因子,r1、r2和r3为介于(0,1)之间的随机数,x1、x2和x3为更新的三个最优解;
[0102]
2.2.特征选择本质上是一个二元问题,bpsogwo算法是psogwo算法的二进制版本,用来寻找最佳特征子集;每一只灰狼的位置都通过三个最优解位置进行更新,二进制空间下,位置更新公式为:
[0103][0104]
其中:为在d维下,第t次迭代后的二进制更新的位置,rand是从[0,1]之间均匀分布中得到的随机数,sigmoid(x)定义为:
[0105][0106]
x1、x2、x3更新和计算公式如下:
[0107][0108][0109][0110]
是在第d维的位置向量α狼、β狼和δ狼的位置向量,是在第d维下
的二进制步长,定义如下:
[0111][0112]
其中:rand是从[0,1]之间均匀分布中得到的随机数,d表示维度,是d维的连续值,计算公式如下:
[0113][0114]
其中:是系数,表示当前候选灰狼与最优三条狼之间的距离;
[0115]
2.3.bpsogwo-knn算法相关参数为:粒子规模为30,最大迭代次数为500次等;
[0116]
2.4.定义bpsogwo-knn算法中的适应度函数为:
[0117][0118]
其中:参数α=0.99;参数β=1-α=0.01;ρr(d)表示knn分类器的错误率;|s|为选定的特性子集中特征数;|t|为数据集中的特征总数;
[0119]
3.使用bbo算法,对knn分类器中的最近邻居值k和bpsogwo-knn算法选择出的最优特征子集中的特征权重进行优化训练,包括下列步骤:
[0120]
3.1.bbo算法将优化问题的每个解看成一个栖息地;解的适应度越高,表示栖息地拥有的物种越多,其迁出率就越高、迁入率就越低;反之,解的适应度越低,其对应的迁出率越低、迁入率越高;通过模拟生物地理学中的迁移和变异过程来对种群进行不断演化,从而求解优化问题;设置bbo算法相关参数,物种数量为100,迭代次数为500次,为了获得有意义的统计结果,对算法执行10次的独立运行;
[0121]
3.2.在bbo算法中,物种的维数为m+1,m为bpsogwo-knn算法选择出的最优特征子集中的特征个数;
[0122]
3.3.定义bbo算法中的适应度函数为knn分类器的错误样本数;
[0123]
3.4.使用bbo算法迭代500次中,适应度函数值最小的那组物种解,作为knn分类器的最近邻居值k和各特征的权重值;
[0124]
4.使用改进加权knn分类算法,进行慢速水平行走、正常速水平行走、快速水平行走、上坡、下坡、坐、站、上楼和下楼九种运动状态的区分,包括下列步骤:
[0125]
4.1.九种运动状态数据按照相同比例组成输入分类器数据集;
[0126]
4.2.输入分类器数据由bpsogwo-knn算法选择出特征构成,各特征的权重值由1.3.4中bbo算法确定;
[0127]
4.3.对输入分类器数据进行min-max标准化,使用欧式距离作为改进加权knn算法中的距离度量,最近邻居值k由1.3.4中bbo算法确定;
[0128]
4.4.如图3所示,改进knn分类算法为:每一种运动状态为一种分类xi,在每一个类中找到距离测试样本距离最近的k个近邻计算出这k个近邻距离测试样本的均值为mi,如果mj为m={m1,m2...mi}中数值最小的,则测试样本属于xj类;使用改进加权knn算法计算输入分类器数据集的分类准确率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1