分析永磁同步电机模型预测转速控制系统稳定性的方法
1.本发明涉及电机控制技术领域,特别是一种分析永磁同步电机模型预测转速控制系统稳定性的方法。
背景技术:
2.永磁同步电机(permanent magnet synchronous motor,pmsm)以其高功率密度、高功率因数、体积小、快速响应等优点在各种电机中脱颖而出,广泛应用于工业、航空、国防等国民生产相关领域。模型预测控制(model predictive control,mpc)具有简洁的构造和快速的动态响应,被广泛地使用在各种电力电子驱动和电机驱动等控制场所;模型预测控制利用电机的离散数学模型,对所有开关状态下的电机状态(如电机的电流或转矩)进行预测。然后,根据预先定义的目标函数对预测结果进行评估,从而选取最优的开关状态。除了简单直接的控制结构以外,可以在预设的目标函数中引入额外的限制条件,从而实现多目标协同控制。
3.国内外学者针对永磁同步电机模型预测控制系统进行了大量研究。其中,基于永磁同步电机模型预测控制系统稳定性的分析主要是利用传递函数分析电流环电磁参数(电感、电阻和磁链)对于电机控制系统的影响,而传递函数适用于分析单输入单输出系统,电机系统是一个高阶的非线性多闭环时变系统,利用传递函数分析具有一定局限性;为了提高基于永磁同步电机模型预测控制系统稳定性的可靠度,本领域技术人员需要深入研究分析转速环机械参数(转动惯量和摩擦系数)与电机控制系统稳定性的关系。
技术实现要素:
4.本发明的目的是为了解决上述问题,设计了一种分析永磁同步电机模型预测转速控制系统稳定性的方法。
5.实现上述目的本发明的技术方案为,一种分析永磁同步电机模型预测转速控制系统稳定性的方法,该方法包括如下内容:
6.利用泰勒级数将永磁同步电机连续数学模型进行离散化,可得预测模型:
[0007][0008][0009]
ωr(k+1)=aωr(k)+biq(k)+cuq(k)+did(k)+et
l
(k)
ꢀꢀ
(2)
[0010]
其中:
[0011][0012][0013][0014][0015][0016]
式中:id(k+1)、iq(k+1)、ωr(k+1)、id(k)、iq(k)、ωr(k)分别为第(k+1)ts时刻和第kts时刻的d、q轴电流和机械角速度;ud(k)、uq(k)分别为第kts时刻作用于电机的d、q轴电压值;ts为离散控制周期,
[0017]
用于评估预测模型结果的成本函数为:
[0018][0019]
式中:i
d*iq*
ω
r*
分别为d、q轴电流设定值和转速设定值;
[0020]
对式(2)的预测模型的条件进行假设,并得到电机状态方程为:
[0021]
x(k+1)=aux(k)+buu(k)+duꢀꢀ
(4)
[0022]
其中:
[0023]
[0024][0025][0026]
为便于分析,将成本函数写成矩阵向量形式:
[0027][0028]
式中:x
*
=[i
d* i
q* ω
r*
]
t
,
[0029]
定义辅助变量:
[0030]
η=|x(k+1)-x
*
|
[0031] =bu(k)u(k)-(x
*-au(k)x(k)-du)
[0032] =az-b
ꢀꢀ
(6)
[0033]
式中:a=bu(k),z=u(k),b=au(k)x(k)-d
u-x
*
,
[0034]
结合式(3)和式(6),则成本函数表达式为:
[0035]
j=η
t
η=(az-b)
t
(az-b)
ꢀꢀ
(7)
[0036]
为了得到最优电压控制矢量,需满足成本函数最小,根据数学求极值理论:
[0037][0038]
得到极值解:
[0039]z*
=(a
t
a)-1atbꢀꢀ
(9)
[0040]
由于d2(η
t
η)/dz=2a
t
a》0,极值即为最小值,则最优电压矢量为:
[0041][0042]
在模型预测控制算法中,使用电机的理想参数r
s0
、l
s0
、ψ
f0
、j
m0
和b
m0
对电机状态进
行预测,相应的参数矩阵为a
u0
、b
u0
和d
u0
,则最优电压矢量u
*
(k):
[0043][0044]
式中:f0=ts/l0,m0=3pψ
f0 t
s2
/4l
0 j0,
[0045]
实际电机参数为rs、ls、ψf、jm和bm,相应的参数矩阵为au、bu和du,则被控电机可以描述为:
[0046]
x(k+1)=aux(k)+buu+du+w
ꢀꢀ
(12)
[0047]
式中:w为不可测量的外部扰动,
[0048]
根据式(11)和式(12),可得电机闭环控制系统状态方程:
[0049]
x(k+1)=(a
u-bug0a
u0
)x(k)+bug0x
*
+(i-bug0)du+w
[0050]
ꢀꢀꢀꢀꢀꢀ
=hx(k)+bug0x
*
+(i-bug0)du+w
ꢀꢀ
(13)
[0051]
式中:i为单位矩阵,h为电机闭环控制系统状态方程的特征矩阵,
[0052]
通过分析特征矩阵h的特征值与单位圆的关系,判断永磁同步电机模型预测转速控制系统的稳定性,若特征值均位于单位圆内,则电机控制系统稳定,若特征值位于单位圆外,则电机控制系统不稳定。
[0053]
所述步骤一中永磁同步电机连续数学模型是基于表贴式永磁同步电机在d、q旋转坐标系下的数学模型,该数学模型的表达式为:
[0054][0055][0056][0057]
式中:id、iq、ud、uq分别为dq坐标系下的定子电流和电压;ls、rs、ψf、jm、bm、p分别为电机电感、定子电阻、转子永磁体磁链、转动惯量、摩擦系数和极对数;ωr为电机的机械角速度;t
l
为负载转矩。
[0058]
对式(2)预测模型做如下假设:
[0059]
a.由于ωr(k)ts数值较小,在实际计算中,可令ωr(k)ts≈ω
rn
ts,其中ω
rn
为额定角速度;
[0060]
b.由于电机反电动势变化相比于电机电流的变化较慢,认为反电动势在两个相邻控制周期之间是恒定的;
[0061]
c.由于控制周期极短,忽略两个相邻控制周期之间负载t
l
变化。
[0062]
根据现代控制理论概念,式(13)中特征矩阵h的特征值表达式为:
[0063]
|λi-h|=0
ꢀꢀ
(14)
[0064]
式中:λ表示特征矩阵的特征值,
[0065]
根据式(13)和式(14)可知,永磁同步电机闭环控制系统的特征矩阵的特征值表达式为:
[0066]
(λ-e)[(λ-f)2+g2]=0
[0067][0068][0069][0070]
由式(15)可得:
[0071][0072][0073][0074]
其中,(l
s0
/l
s-1)pωrts远小于1,可将其近似为0。
[0075]
根据式(16)并结合永磁同步电机闭环控制系统的特征矩阵的特征值与预测模型中预测参数的关系可知,永磁同步电机模型预测转速控制系统中,电感参数失配的稳定域为(0,2ls),转动惯量参数失的稳定域为(0,2jm)。
[0076]
所述永磁同步电机闭环控制系统的特征矩阵的特征值与预测模型中预测参数的关系如下:
[0077]
1)当预测模型中机械参数等于电机实际机械参数,电磁参数电感等于电机实际电感参数时,即l
s0
=ls,特征值λ1、λ2、λ3:
[0078]
λ1=λ2=λ3=0
ꢀꢀ
(17)
[0079]
所述特征值必在单位圆内,预测模型中电感参数匹配情况下,电阻参数失配不会影响特征矩阵的特征值变化,因此,电阻参数失配不会影响电机控制系统的稳定性;
[0080]
2)当预测模型中机械参数等于电机实际机械参数,电磁参数电阻等于电机实际电阻参数时,即r
s0
=rs,可得:
[0081][0082][0083]
式18中,ts(rs/l
s-r
s0
/l
s0
)远小于1,可将其近似为0,若要使特征值在单位圆内,需满足:
[0084][0085]
当预测模型中电阻参数匹配情况下,电感参数失配会影响特征矩阵的特征值变化,当实际值与模型中值相差2倍以上时,电机控制系统发散;
[0086]
3)当预测模型中电磁参数等于电机实际电磁参数,机械参数转动惯量等于电机实际转动惯量时,即j
m0
=jm,特征值λ1、λ2、λ3:
[0087]
λ1=λ2=λ3=0
ꢀꢀ
(20)
[0088]
预测模型中机械参数转动惯量匹配情况下,摩擦系数参数失配不会影响特征矩阵的特征值变化,因此,电机控制系统的稳定性与摩擦系数参数无关;
[0089]
4)当预测模型中,电磁参数等于电机实际电磁参数,摩擦系数等于电机实际摩擦系数时,即b
m0
=bm,可得:
[0090]
λ1=λ2=0
[0091][0092]
式21中,ts(bm/j
m-b
m0
/j
m0
)远小于1,可将其近似为0,若要使特征值在单位圆内,需满足:
[0093][0094]
当预测模型中摩擦系数参数匹配情况下,转动惯量参数失配会影响特征矩阵的特征值变化,当模型中值与实际值相差2倍以上时,电机控制系统发散。
[0095]
有益效果
[0096]
利用本发明的技术方案制作的分析永磁同步电机模型预测转速控制系统稳定性的方法,其具有如下优势:
[0097]
1、本技术的技术方案通过建立基于模型预测转速控制的电机离散状态方程,结合成本函数,求解最优电压矢量,得到电机闭环系统的状态方程,分析状态方程特征矩阵的特征值与单位圆的关系,判断电机控制系统的稳定性,此外,利用状态方程分析方法可以分析多输入多输出系统,可以更全面分析其稳定性;
[0098]
2、本技术的技术方案通过分析电磁参数和机械参数对电机控制系统稳定性的影响,得出电机控制系统稳定运行的边界条件,为永磁同步电机模型预测控制系统稳定性分析提供了理论依据。
附图说明
[0099]
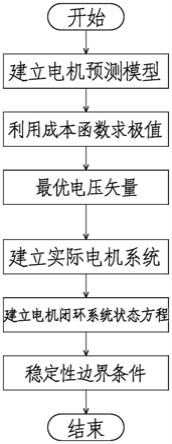
图1是本发明所述分析永磁同步电机模型预测转速控制系统稳定性的方法的流程图;
[0100]
图2是本发明所述永磁同步电机的控制结构框图;
[0101]
图3是本发明所述不同电磁参数(em)下q轴的电流波形图;
[0102]
图4是本发明所述不同机械参数(mp)下q轴的电流波形图;
[0103]
图5是本发明所述q轴电流脉动与电感和电阻偏差程度关系图;
[0104]
图6是本发明所述q轴电流脉动与电感和磁链偏差程度关系图;
[0105]
图7是本发明所述q轴电流脉动与转动惯量和摩擦系数偏差程度关系图;
[0106]
图8是本发明所述不同电感下的q轴电流脉动图;
[0107]
图9是本发明所述不同转动惯量下的q轴电流脉动图。
具体实施方式
[0108]
下面结合附图对本发明进行具体描述,如图1-9所示;
[0109]
为便于计算,现对式(2)预测模型做如下假设:
[0110]
1.由于ωr(k)ts数值较小,在实际计算中,可令ωr(k)ts≈ω
rn
ts,其中ω
rn
为额定角速度。
[0111]
2.由于电机反电动势变化相比于电机电流的变化较慢,认为反电动势在两个相邻控制周期之间是恒定的。
[0112]
3.由于控制周期极短,忽略两个相邻控制周期之间负载t
l
变化。
[0113]
根据以上假设,可得电机状态方程为:
[0114]
x(k+1)=aux(k)+buu(k)+duꢀꢀ
(4)
[0115]
其中:
[0116][0117][0118][0119]
为便于分析,将成本函数写成矩阵向量形式:
[0120][0121]
式中:x
*
=[i
d* i
q* ω
r*
]
t
。
[0122]
定义辅助变量:
[0123]
η=|x(k+1)-x
*
|
[0124] =bu(k)u(k)-(x
*-au(k)x(k)-du)
[0125] =az-b
ꢀꢀ
(6)
[0126]
式中:a=bu(k),z=u(k),b=au(k)x(k)-d
u-x
*
。
[0127]
结合式(3)和式(6),则成本函数表达式为:
[0128]
j=η
t
η=(az-b)
t
(az-b)
ꢀꢀ
(7)
[0129]
为了得到最优电压控制矢量,需满足成本函数最小,根据数学求极值理论:
[0130][0131]
得到极值解:
[0132]z*
=(a
t
a)-1atbꢀꢀ
(9)
[0133]
由于d2(η
t
η)/dz=2a
t
a》0,极值即为最小值,则最优电压矢量为:
[0134][0135]
模型预测控制的一个主要问题是其控制性能高度依赖于电机参数的准确性。电机状态的预测是基于电机的数学模型实现的,数学模型中包含大量电机参数,然而很多情况下无法准确地给出相应的参数。同时,在不同工作条件下,电机参数也会发生变化。因此,参数不确定性会产生预测误差,从而影响控制性能,甚至导致系统不稳定。在模型预测控制算法中,使用电机的理想参数r
s0
、l
s0
、ψ
f0
、j
m0
和b
m0
对电机状态进行预测,相应的参数矩阵为a
u0
、b
u0
和d
u0
,则最优电压矢量u
*
(k):
[0136][0137]
式中:f0=ts/l0,m0=3pψ
f0 t
s2
/4l
0 j0。
[0138]
实际电机参数为rs、ls、ψf、jm和bm,相应的参数矩阵为au、bu和du。则被控电机可以描述为:
[0139]
x(k+1)=aux(k)+buu+du+w
ꢀꢀ
(12)
[0140]
式中:w为不可测量的外部扰动。
[0141]
根据式(11)和式(12),可得电机闭环控制系统状态方程:
[0142]
x(k+1)=(a
u-bug0a
u0
)x(k)+bug0x
*
+(i-bug0)du+w
[0143]
ꢀꢀꢀꢀꢀꢀ
=hx(k)+bug0x
*
+(i-bug0)du+w
ꢀꢀ
(13)
[0144]
式中:i为单位矩阵,h为电机闭环控制系统状态方程的特征矩阵。
[0145]
通过分析特征矩阵h的特征值与单位圆的关系,判断永磁同步电机模型预测转速控制系统的稳定性。若特征值均位于单位圆内,则电机控制系统稳定,若特征值位于单位圆外,则电机控制系统不稳定。综上所述,稳定性分析过程流程图如图2所示。
[0146]
根据现代控制理论概念,式(13)中特征矩阵h的特征值表达式为:
[0147]
|λi-h|=0
ꢀꢀ
(14)
[0148]
式中:λ表示特征矩阵的特征值。
[0149]
根据式(13)和式(14),电机闭环控制系统的特征矩阵的特征值表达式如下所示:
[0150]
(λ-e)[(λ-f)2+g2]=0
[0151][0152][0153][0154]
由式(15)可得:
[0155][0156][0157][0158]
其中,(l
s0
/l
s-1)pωrts远小于1,可将其近似为0。
[0159]
根据式(16),电机闭环控制系统的特征矩阵的特征值与预测模型中预测参数的关系如下所示:
[0160]
1)当预测模型中机械参数等于电机实际机械参数,电磁参数电感等于电机实际电感参数时,即l
s0
=ls,特征值λ1、λ2、λ3:
[0161]
λ1=λ2=λ3=0
ꢀꢀ
(17)
[0162]
特征值必在单位圆内,预测模型中电感参数匹配情况下,电阻参数失配不会影响特征矩阵的特征值变化。因此,电阻参数失配不会影响电机控制系统的稳定性。
[0163]
2)当预测模型中机械参数等于电机实际机械参数,电磁参数电阻等于电机实际电阻参数时,即r
s0
=rs,可得:
[0164][0165][0166]
式18中,ts(rs/l
s-r
s0
/l
s0
)远小于1,可将其近似为0。若要使特征值在单位圆内,需满足:
[0167][0168]
当预测模型中电阻参数匹配情况下,电感参数失配会影响特征矩阵的特征值变化,当实际值与模型中值相差2倍以上时,电机控制系统发散。
[0169]
3)当预测模型中电磁参数等于电机实际电磁参数,机械参数转动惯量等于电机实际转动惯量时,即j
m0
=jm,特征值λ1、λ2、λ3:
[0170]
λ1=λ2=λ3=0
ꢀꢀ
(20)
[0171]
预测模型中机械参数转动惯量匹配情况下,摩擦系数参数失配不会影响特征矩阵的特征值变化。因此,电机控制系统的稳定性与摩擦系数参数无关。
[0172]
4)当预测模型中,电磁参数等于电机实际电磁参数,摩擦系数等于电机实际摩擦系数时,即b
m0
=bm,可得:
[0173]
λ1=λ2=0
[0174][0175]
式21中,ts(bm/j
m-b
m0
/j
m0
)远小于1,可将其近似为0。若要使特征值在单位圆内,需满足:
[0176][0177]
当预测模型中摩擦系数参数匹配情况下,转动惯量参数失配会影响特征矩阵的特征值变化,当模型中值与实际值相差2倍以上时,电机控制系统发散。
[0178]
根据上述分析,永磁同步电机模型预测转速控制系统中,电感参数失配与转动惯量参数失配会影响电机控制系统的稳定性,稳定域为(0,2ls)和(0,2jm)。
[0179]
本技术方案采用的电子器件均为现有产品,本技术的技术方案对于上述电子器件的结构没有特殊要求和改变,上述电子器件均属于常规电子设备;
[0180]
在本技术方案实施的过程中,本领域人员需要将本案中所有电气件与其适配的电
源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
[0181]
本技术技术方案在实施过程中,图3和图4分别为不同电磁参数和不同机械参数时q轴电流波形图。其中,em代表电机电磁参数,mp代表电机机械参数。由图3和图4可知,电机电磁参数不匹配和机械参数不匹配使q轴电流波形发散。当控制算法中电磁参数由正常参数分别变为0.5倍电磁参数和2倍电磁参数时,q轴电流波动显著增大。当控制算法中机械参数由正常机械参数分别变为0.5倍机械参数和2倍机械参数时,q轴电流波动也显著增大。
[0182]
图5、图6和图7分别为q轴电流脉动与电感和电阻偏差程度关系图、q轴电流脉动与电感和磁链偏差程度关系图和q轴电流脉动与转动惯量和摩擦系数偏差程度关系图。由图5、图6和图7可知,影响电流脉动的主要为控制算法中电磁参数电感与机械参数转动惯量。当控制模型中电感参数、转动惯量参数偏离实际电机参数值程度越大,电流脉动越明显,电机控制系统逐渐向不稳定趋势变化。
[0183]
为验证所提出的电机控制系统稳定性的边界条件,测试了不同电感值与转动惯量下的电流波形并进行分析。电流脉动在不同的电感值和转动惯量下的实验结果分别如图8和图9所示。图8中,空载情况下,电流脉动随电感值偏离电机参数标称值的增大而增大,利用磁粉制动器进行加载试验,加载情况下,电感值偏离程度对于电机控制系统稳定性的影响更加显著,在电感为1mh和19.8mh时,电机系统转速不能跟随参考值,电机控制系统失稳。图9中,空载情况下,电流脉动随转动惯量偏离电机参数标称值的增大而增大,加载情况下,转动惯量偏离程度对于电机控制系统稳定性的影响更加显著,在转动惯量为0.00012kg
·
m2和0.0010kg
·
m2时,电机系统转速不能跟随参考值,电机控制系统失稳。实验结果表明电机控制系统稳定性边界条件与理论分析结果基本吻合。
[0184]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
[0185]
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1