一种障碍物检测的方法及装置与流程
本说明书涉及障碍物检测领域,尤其涉及一种障碍物检测的方法及装置。
背景技术:
1、目前,随着科技的发展,无人机被广泛用于电力、气象、农业、配送等领域,而在无人机的降落过程中,为了保证无人机的安全,需要实时检测无人机起降平台上是否有障碍物,避免无人机起降平台上的障碍物影响无人机降落。
2、在现有技术中,进行障碍物检测时,一般采用光流法、背景差分法、高斯混合模型或深度学习算法进行实现。其中,采用高斯混合模型进行障碍物检测时,首先,建立高斯混合模型,其次,采用背景差分法,获得运动物体,最后,输出当前帧的检测结果。
技术实现思路
1、本说明书提供一种障碍物检测的方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种障碍物检测的方法,包括:
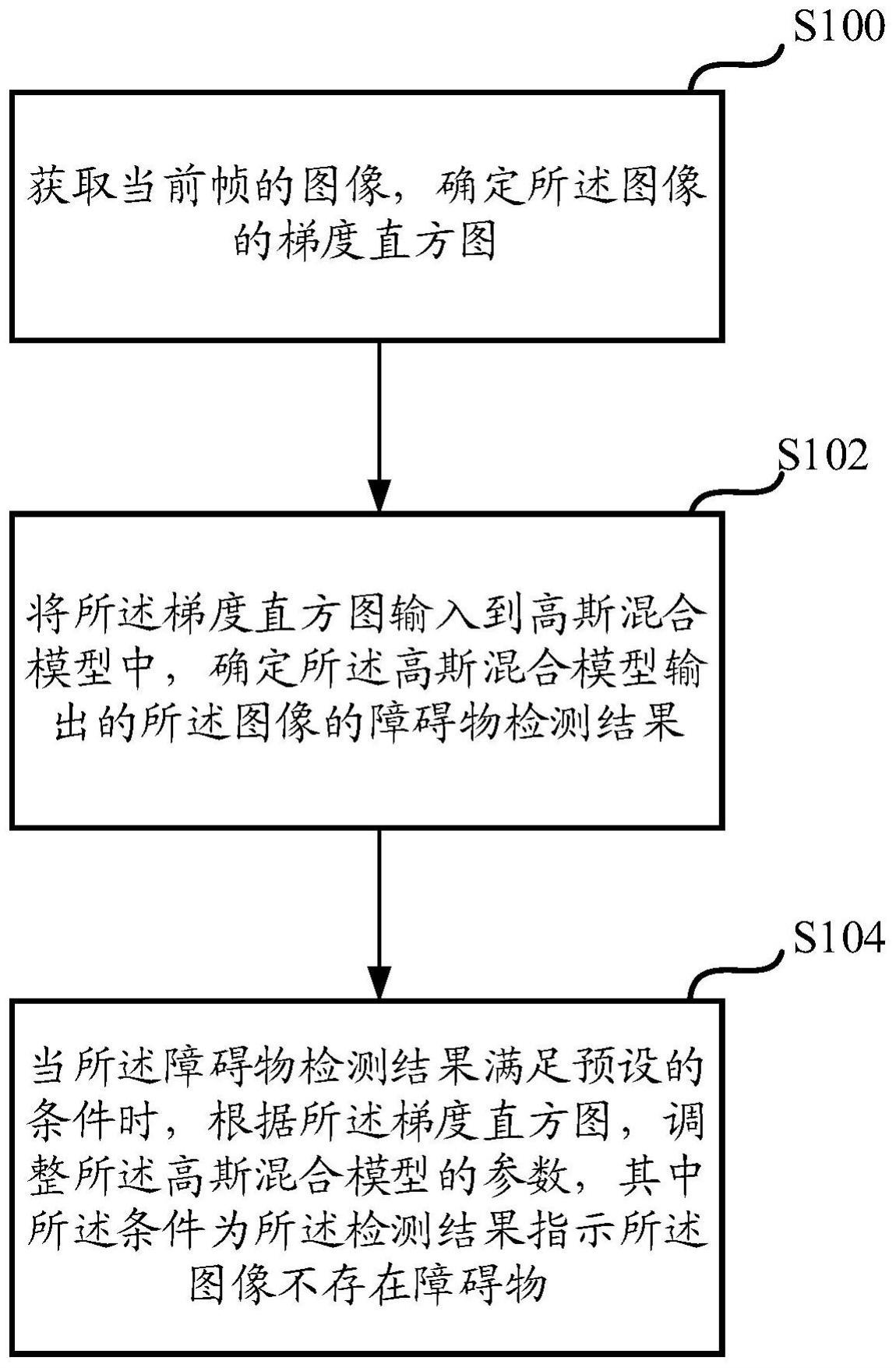
4、获取当前帧的图像,确定所述图像的梯度直方图;
5、将所述梯度直方图输入到高斯混合模型中,确定所述高斯混合模型输出的所述图像的障碍物检测结果;
6、当所述障碍物检测结果满足预设的条件时,根据所述梯度直方图,调整所述高斯混合模型的参数,其中所述条件为所述检测结果指示所述图像不存在障碍物。
7、可选的,获取当前帧的图像,确定所述图像的梯度直方图,具体包括:
8、获取当前帧的图像,将所述图像划分为若干个区域,并确定各区域的梯度直方图;
9、针对每个区域,根据该区域的梯度直方图以及预设的各梯度方向,分别确定各梯度方向的梯度直方图分量;
10、将各个区域中各梯度方向的梯度直方图分量,作为所述图像的梯度直方图。
11、可选的,将所述梯度直方图输入到高斯混合模型中,确定所述高斯混合模型输出的所述图像的障碍物检测结果,具体包括:
12、针对每个区域,将该区域各梯度方向对应的梯度直方图分量,分别输入到各梯度方向对应的高斯混合模型中,确定所述各梯度方向对应的高斯混合模型输出的各梯度方向对应的障碍物预测结果;
13、根据各梯度方向对应的障碍物预测结果,确定该区域的障碍物预测结果;
14、根据各个区域的障碍物预测结果,确定所述图像的障碍物检测结果。
15、可选的,根据各个区域的障碍物预测结果,确定所述图像的障碍物检测结果,具体包括:
16、根据所述图像中障碍物预测结果为存在障碍物的区域,确定连通域;
17、判断所述连通域的面积是否不小于预设的障碍物阈值;
18、若是,则确定所述图像的障碍物检测结果为存在障碍物;
19、若否,则确定所述图像的障碍物检测结果为不存在障碍物。
20、可选的,所述方法还包括:
21、获取当前帧之前第一数量的各历史帧的障碍物检测结果;原始结果
22、从当前帧以及所述第一数量的各历史帧中,确定障碍物检测结果为存在障碍物的帧的数量,作为第二数量;
23、判断所述第二数量是否大于预设的第三数量;
24、若是,则更新当前帧的障碍物检测结果为存在障碍物;调整结果
25、若否,则更新当前帧的障碍物检测结果为不存在障碍物。
26、可选的,所述方法还包括:
27、获取当前帧之前第四数量的各历史帧的障碍物检测结果;
28、从当前帧以及所述第四数量的各历史帧中,确定障碍物检测结果为存在障碍物的帧的数量,作为第五数量;
29、判断所述第五数量是否不大于预设的第六数量;
30、若是,则根据所述梯度直方图,调整所述高斯混合模型的参数;
31、若否,则不对所述高斯混合模型的参数进行调整。
32、可选的,确定所述图像的梯度直方图,具体包括:
33、将所述图像输入到预设的第一高斯函数中,确定第一滤波结果;
34、将所述图像输入到预设的第二高斯函数中,确定第二滤波结果;
35、根据所述第一滤波结果与所述第二滤波结果的差,确定所述图像的高斯差分滤波结果;
36、根据所述图像的高斯差分滤波结果,确定所述图像的梯度直方图。
37、本说明书提供一种障碍物检测的装置,包括:
38、获取模块,获取当前帧的图像,确定所述图像的梯度直方图;
39、检测模块,将所述梯度直方图输入到高斯混合模型中,确定所述高斯混合模型输出的所述图像的障碍物检测结果;
40、训练模块,当所述障碍物检测结果满足预设的条件时,根据所述梯度直方图,调整所述高斯混合模型的参数,其中所述条件为所述检测结果指示所述图像不存在障碍物。
41、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述障碍物检测的方法。
42、本说明书提供了一种无人机起降平台,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述障碍物检测的方法。
43、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
44、在本说明书提供的障碍物检测的方法中,无人机起降平台获取当前帧的图像,确定该图像的梯度直方图,并将该图像的梯度直方图输入到高斯混合模型中,确定高斯混合模型输出的障碍物检测结果,再根据该障碍物检测结果确定该障碍物检测结果是否满足预设的条件,当该障碍物检测结果满足该条件时,采用该图像的梯度直方图对高斯混合模型的参数进行调整。
45、从上述方法中可以看出,本方法创造性的将图像的梯度直方图输入到高斯混合模型中,减少了光照、阴影对障碍物检测结果的影响,在确定该图像的障碍物检测结果之后,通过判断该图像是否存在障碍物,确定是否对该高斯混合模型的参数进行更新,实现了对高斯混合模型的选择性更新,提高了高斯混合模型对图像中的障碍物检测的准确性。
技术特征:
1.一种障碍物检测的方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,获取当前帧的图像,确定所述图像的梯度直方图,具体包括:
3.如权利要求2所述的方法,其特征在于,将所述梯度直方图输入到高斯混合模型中,确定所述高斯混合模型输出的所述图像的障碍物检测结果,具体包括:
4.如权利要求3所述的方法,其特征在于,根据各个区域的障碍物预测结果,确定所述图像的障碍物检测结果,具体包括:
5.如权利要求1所述的方法,其特征在于,所述方法还包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,确定所述图像的梯度直方图,具体包括:
8.一种障碍物检测的装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~7任一项所述的方法。
10.一种无人机起降平台,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1~7任一项所述的方法。
技术总结
本说明书公开了一种障碍物检测的方法及装置,获取当前帧的图像,确定该图像的梯度直方图,并将该图像的梯度直方图输入到高斯混合模型中,确定高斯混合模型输出的障碍物检测结果,再确定该障碍物检测结果是否满足预设的条件,当该障碍物检测结果满足该条件时,采用该图像的梯度直方图对高斯混合模型的参数进行调整。可见,本方法创造性的将图像的梯度直方图输入到高斯混合模型中,减少了光照、阴影对障碍物检测结果的影响,在确定该图像的障碍物检测结果之后,通过判断该图像是否存在障碍物,确定是否对该高斯混合模型的参数进行更新,实现了对高斯混合模型的选择性更新,提高了高斯混合模型对图像中的障碍物检测的准确性。
技术研发人员:黄冉冉,刘新民,蔡剑成,毛一年
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!