一种填土地层中块石分布的预测方法及系统与流程
1.本技术属于填土地层盾构掘进技术领域,具体涉及一种填土地层中块石分布的预测方法及系统。
背景技术:
2.随着城市轨道交通的蓬勃发展,盾构掘进凭借其开挖速度快、施工安全性高、对周围土体影响小、地面工作量小等优点得到广泛应用。然而盾构掘进过程中可能的问题之一就是遭遇块石分布的填土地层,掘进经过块石密集的填土区域时会遇到块石随刀盘转动导致掘进困难、姿态不可控等问题,进而影响到工期、施工安全和成本。在实际施工过程中,盾构司机会根据推力、扭矩等数据对机器参数进行调整,受限于经验和人机协同水平,司机很难选择最优参数调整方案。
3.目前,一种基于深度神经网络的盾构机参数优化方法的专利,具体公开了以盾构机环号、总功率、刀盘扭矩、刀盘压力、土仓压力等数据作为样本数据,对盾构机推进速度进行预测。一种基于深度强化学习的盾构最优自主掘进控制方法的专利,具体公开了利用传感器实测数据获取推进力和刀盘扭矩期望值,利用奖励函数模块进行修正后自动控制盾构机前进。一种基于盾构掘进参数的不良地质预测方法的专利,具体公开了使用刀盘转速、推进速度等数据确定掘进比能,利用修正比能模型得到修正比能,判断通过孤石区的方法。上述技术均是应用于非填土地层中孤石区域的探测及盾构处理方法,但是,对于填土土地层盾构项目施工,上述技术难以准确及时评估块石群的分布,难以应对不断变化的填土地层的地质条件。
4.因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现要素:
5.本技术的目的在于提供一种填土地层中块石分布的预测方法及系统,以解决现有技术中存在的问题。
6.为了实现上述目的,本技术提供如下技术方案:
7.一种填土地层中块石分布的预测方法,所述方法包括以下步骤:
8.步骤s10,采集与目标填土地层同一施工掘进隧道中盾构机的前期施工数据作为样本数据,其中,所述样本数据包括盾构机前期施工中的盾构机参数和填土地层的地质参数;
9.步骤s20,基于采集的样本数据对预先构建的bp神经网络模型进行训练,得到训练完成的bp神经网络模型;
10.步骤s30,基于训练完成的bp神经网络模型,以采集的目标填土地层的当前地质参数和当前盾构机参数作为输入数据,根据输出数据预测目标填土地层中块石的分布参数;
11.其中,块石的分布参数包括块石尺寸、块石硬度和块石的位置。
12.可选地,所述样本数据包括盾构机的推力、液压缸推进速度、刀盘贯入度、盾构掘
进速度、刀盘扭矩、刀片压力、土仓压力、螺旋输送机转速及压力、总推力、输出功率、泡沫流量、密封油脂压力、水土压力、粘聚力、摩擦角和固结系数。
13.可选地,所述输出数据包括块石距离刀盘中心的距离、块石位置与水平线的夹角、块石直径和块石硬度。
14.可选地,步骤s20中,基于采集的样本数据对预先构建的bp神经网络模型进行训练之前,还包括:对采集的样本数据进行预处理,其中,预处理具体为:
15.对采集的样本数据中误差大于90%的数据进行剔除,并对剔除后的样本数据进行adf检验,判断是否满足平稳性要求;
16.在样本数据满足平稳性要求时,采用下列函数对样本数据进行归一化处理:
[0017][0018]
式中,xn为归一化处理后介于-1和1之间的数据;x
max
为样本数据的最大值;x
min
为样本数据的最小值;xi为第i个输入数据;
[0019]
选取不同时间点的盾构机参数和相应时间点刀盘所处位置的地质参数作为一组数据,多组数据作为预处理后的样本数据。
[0020]
可选地,步骤s20中,预先构建的bp神经网络模型中,隐含层节点数按下列公式计算得到:
[0021]
n1=log2n
[0022]
式中,n1为隐含层节点数;n为输入向量维数。
[0023]
可选地,所述输出数据还包括输出功率建议值、盾构掘进速度建议值、刀盘扭矩建议值和刀盘转速建议值,步骤s30之后还包括:
[0024]
步骤s40,根据输出数据调整盾构机的当前施工参数,得到盾构机穿越目标填土地层的施工参数,其中,盾构机的施工参数包括刀盘扭矩、输出功率、刀盘转速和掘进速度。
[0025]
可选地,步骤s30之后还包括:
[0026]
步骤s50,根据预测的目标填土地层中块石的分布参数,确定盾构机的施工方案。
[0027]
可选地,步骤s50具体为:当预测的目标填土地层中块石的数量小于预设数量阈值,尺寸小于预设尺寸阈值时,确定盾构机的施工方案为盾构机直接推进通过目标填土地层的方法;当预测的目标填土地层中块石的数量大于预设数量阈值,尺寸大于预设尺寸阈值时,确定盾构机的施工方案为先对块石进行破碎处理,再将破碎后的块石取出,之后盾构机推进通过。
[0028]
本技术还提出了一种填土地层中块石分布的预测系统,所述系统包括:采集单元,配置为采集与目标填土地层同一施工掘进隧道中盾构机的前期施工数据作为样本数据,其中,所述样本数据包括盾构机前期施工中的盾构机参数和填土地层的地质参数;训练单元,配置为基于采集的样本数据对预先构建的bp神经网络模型进行训练,得到训练完成的bp神经网络模型;预测单元,配置为基于训练完成的bp神经网络模型,以采集的目标填土地层的当前地质参数和当前盾构机参数作为输入数据,根据输出数据预测目标填土地层中块石的分布参数,其中,块石的分布参数包括块石尺寸、块石硬度和块石的位置。
[0029]
可选地,所述系统还包括:调整单元,配置为根据输出数据调整盾构机的当前施工参数,得到盾构机穿越目标填土地层的施工参数,其中,盾构机的施工参数包括刀盘扭矩、
输出功率、刀盘转速和掘进速度;确定单元,配置为根据预测的目标填土地层中块石的分布参数,确定盾构机的施工方案。
[0030]
与最接近的现有技术相比,本技术实施例的技术方案具有如下有益效果:
[0031]
本技术提供的技术方案中,首先采集与目标填土地层同一施工掘进隧道中盾构机的前期施工数据作为样本数据,其中,样本数据包括盾构机前期施工中的盾构机参数和相应填土地层的地质参数;然后基于采集的样本数据对预先构建的bp神经网络模型进行训练,得到训练完成的bp神经网络模型;之后基于训练完成的bp神经网络模型,以采集的目标填土地层的当前地质参数和当前盾构机参数作为输入数据,根据输出数据预测目标填土地层中块石的分布参数;其中,块石的分布参数包括块石尺寸、块石硬度和块石的位置。如此的技术方案,可以实现准确地预测填土地层盾构隧道掌子面前方块的分布情况,过程简便,易于实际操作,准确性高,降低了对司机经验和主观判断的依赖程度,确保盾构机掘进过程的安全。并且,由于本技术对bp神经网络模型的训练数据为与目标填土地层同一施工掘进隧道中盾构机的前期施工数据(即盾构机参数和地质参数),则随着盾构机掘进过程的不断深入,bp神经网络模型的预测精度也在不断提高,进而能够不断提升填土地层中块石分布的预测精度。
附图说明
[0032]
构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。其中:
[0033]
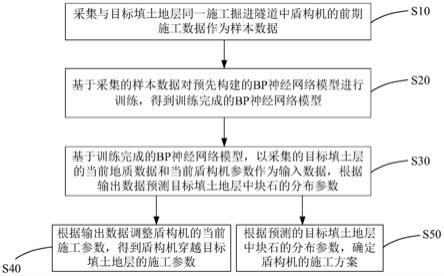
图1为根据本技术的一些实施例提供的填土地层中块石分布的预测方法的流程示意图;
[0034]
图2为根据本技术的一些实施例提供的基于输出数据绘制的距离盾构隧道掌子面前方一定距离的块石分布示意图;
[0035]
图3为根据本技术的另一些实施例提供的填土地层中块石分布的预测系统的功能框图。
[0036]
图中标号:1-盾构机外轮廓;2-刀盘中心;3-块石;100-采集单元;200-训练单元;300-预测单元;400-调整单元;500-确定单元。
具体实施方式
[0037]
下面将对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本技术保护的范围。
[0038]
下面将结合实施例来详细说明本技术。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
[0039]
针对现有技术中存在的问题,相较于非填土地层,填土地层具有组成物质的成分杂乱、均匀性差、强度低、压缩性高、无天然沉积结构的特点,填土地层在自重压力下很难达到完全固结,部分填土地层具有较强的湿陷性和振陷性、压缩性高、承载力低,盾构掘进时极易出现塌陷事故,且填土地层中块石对盾构机刀盘的正常使用具有威胁性。
[0040]
而传统的探测方法主要采用地质雷达进行地层探测,但在填土地层中回填的土壤
由于没有固结或固结不完全,土质疏松、存在较多空隙,除较大块石外还存在小石块、混凝土块等,导致探测获得的雷达剖面图容易在图像分析时发生错误。填土的不密实导致土壤中出现许多空隙,干扰了目标管线的波形,显示为许多类似双曲线的杂乱无章波形,掩盖了目标块石反射波。因此,传统的雷达探测法难以适用于填土地层。
[0041]
并且,现有专利主要是利用神经网络预测推进速度,或在非填土地层中利用强化学习修正盾构参数等,但缺少采用神经网络模型进行盾构机参数优化的,尤其是缺少适用于填土地层的方法。
[0042]
基于此,本技术提供了一种填土地层中块石分布的预测方法,本技术的预测方法适用于常规探测方法难以适用的填土地层。本技术的预测方法基于盾构机参数和地质参数即可准确预测填土地层盾构隧道掌子面前方块的分布情况,过程简便,易于实际操作,有较高的准确性,降低了对司机经验和主观判断的依赖程度,确保盾构机掘进过程的安全。
[0043]
图1为根据本技术的一些实施例提供的填土地层中块石分布的预测方法的流程示意图,如图1所示,本技术的预测方法包括以下步骤:
[0044]
步骤s10,采集与目标填土地层同一施工掘进隧道中盾构机的前期施工数据作为样本数据,其中,样本数据包括盾构机前期施工中的盾构机参数和相应填土地层的地质参数;
[0045]
步骤s20,基于采集的样本数据对预先构建的bp神经网络模型进行训练,得到训练完成的bp神经网络模型;
[0046]
步骤s30,基于训练完成的bp神经网络模型,以采集的目标填土地层的当前地质参数和当前盾构机参数作为输入数据,根据输出数据预测目标填土地层中块石的分布参数;其中,块石的分布参数包括块石尺寸、块石硬度和块石的位置。
[0047]
需要说明的是,本技术的样本数据采用了与目标填土地层同一施工掘进隧道的前期数据,而不是其它施工隧道的数据进行训练,因而,随着训练数据的增多,训练出来的模型能够更加符合该隧道的掘进预测。本技术中样本数据的选择主要是根据已有经验及施工中对盾构机掘进过程有影响的因素来确定的,由于对盾构机掘进过程有影响的因素主要为盾构机掘进过程中的机器参数和填土地层的地质数据,则选择样本数据的类型为盾构机前期施工中的盾构机参数和相应填土地层的地质参数。
[0048]
本实施例中,通过设置盾构pdv数据采集系统实时采集盾构机掘进过程的盾构机参数和相应填土地层的地质参数,采集的当前时刻之前的数据为样本数据,样本数据作为bp神经网络模型的训练数据,经过训练数据对bp神经网络模型进行训练完成后的bp神经网络模型才能适用于本技术填土地层中块石分布的预测。在采用训练完成的bp神经网络模型进行预测时,以目标填土地层的当前地质参数和当前盾构参数作为输入数据,根据模型的输出数据便可预测目标填土地层中块石的分布参数。
[0049]
可以理解的,本技术采用bp神经网络模型来预测填土地层中块石的分布情况,由于本技术对bp神经网络模型的训练数据为盾构机参数和地质参数,则随着盾构机掘进过程的不断深入,训练数据逐渐增多,bp神经网络模型的预测精度也在不断提高,进而不断提升填土地层中块石分布的预测精度。
[0050]
本技术可选实施例中,样本数据包括盾构机的推力、液压缸推进速度、刀盘贯入度、盾构掘进速度、刀盘扭矩、刀片压力、土仓压力、螺旋输送机转速及压力、总推力、输出功
率、泡沫流量、密封油脂压力、水土压力、粘聚力、摩擦角和固结系数等112种盾构机参数和地质参数,采集的样本数据中参数的单位均转换为国际单位制。
[0051]
本技术可选实施例中,输出数据包括块石距离刀盘中心的距离、块石位置与水平线的夹角、块石直径和块石硬度,本实施例中,bp神经网络模型的输出数据包括块石的位置、尺寸、硬度等分布参数,由此可以很直观地预测填土地层中块石的分布情况。
[0052]
图2为根据本技术的一些实施例提供的基于输出数据绘制的距离盾构隧道掌子面前方一定距离的块石分布示意图,从图2中可以看出,以刀盘中心1为中心,盾构机外轮廓1内的多个块石3间隔分布,其中块石3直径各不相同,且块石距离刀盘中心的距离不同。
[0053]
本技术的可选实施例中,步骤s20中,基于采集的样本数据对预先构建的bp神经网络模型进行训练之前,还包括:对采集的样本数据进行预处理,其中,预处理具体为:
[0054]
对采集的样本数据中误差大于90%的数据进行剔除,并对剔除后的样本数据进行adf检验,判断是否满足平稳性要求;
[0055]
在样本数据满足平稳性要求时,采用下列函数对样本数据的数据进行归一化处理:
[0056][0057]
式中,xn为归一化处理后介于-1和1之间的数据;x
max
为样本数据的最大值;x
min
为样本数据的最小值;xi为第i个输入数据。
[0058]
需要说明的是,若样本数据不满足平稳性要求,则重复上述步骤,直至其满足平稳性要求。
[0059]
本实施例中,采用adf检验主要是针对样本数据中的时间序列数据,检验时间序列数据中是否存在单位根,若存在单位根说明该时间序列数据为非平稳时间序列,单位根就是指单位根过程,如果时间序列数据中存在单位根过程就说明不平稳,会使得回归分析中存在伪回归。本技术中,在bp神经网络模型的输入数据(也即样本数据)中包括了随时间序列变化的参数,比如盾构机的推力、液压缸推进速度、盾构掘进速度、刀盘扭矩、刀片压力、土仓压力、总推力、输出功率、泡沫流量、密封油脂压力,这些参数如果未能通过adf检验,认为其测量或收集环境出现错误,则舍弃错误样本数据。
[0060]
选取不同时间点的盾构机参数和相应时间点刀盘所处位置的地质参数作为一组数据,多组数据作为预处理后的样本数据,预处理后的样本数据即为训练数据集。
[0061]
本技术实施例中,采用训练数据集对bp神经网络模型进行训练时,将训练数据集输入bp神经网络模型中后,会自动划分为训练集和检测集,检测集的检测结果会被输出,根据输出结果中的预测精度指标可以判断神经网络的优劣,然后对神经网络模型的训练步数、学习速率等参数进行调整,直到训练精度达到要求。bp神经网络模型训练的原理具体如下:
[0062]
(1)将区间(0,1)内的随机数值,赋予连接输入层、隐含层的权值{ω
ij
}和阀值{θj},以及连接隐含层、输出层的权值{ν
jk
}和阀值{γk};同时赋予学习效率η、误差精度ζ,给定相应的最大训练次数。
[0063]
(2)将样本数据中的样本数据(xn,yn)输入bp神经网络模型,随后进行“顺模式传播”过程,即隐含层由输入值sj计算节点输出计算值hj;输出层由输入值lk计算节点输出计
算值qk:
[0064][0065][0066]
f(x)=(1+e-x
)-1
[0067]
式中:p为隐含层的神经元数量;m为输出层的神经元数量;f(x)为网络结构的激励函数,j表示隐含层中第j个神经元,k表示输出层中第k个神经元,下标i表示数据集中不同组的数据。
[0068]
(3)进行误差逆传播过程,即反向进行输出层和隐含层中各单元之间的一般化误差计算,按下列公式分别进行输出层和隐含层之间的一般化误差δk和ej的计算:
[0069][0070][0071]
(4)输入层、隐含层的权值ω
ij
和阀值θj,以及连接隐含层、输出层的权值v
jk
和阀值γk分别按下列表达式进行反向修正:
[0072][0073][0074]
式中,t表示循环次数,表示循环t次后输出层的一般化误差,表示循环t次后隐含层的一般化误差。
[0075]
(5)利用剩余数据给神经网络继续进行上述过程,使得n个样本全部训练完毕。直到按下列式计算出的最终误差小于初始误差阀值,并且要求训练运行数量达到初始最低阀值,否则重复进行上述算法训练。
[0076][0077]
式中,表示表示第n个样本中第k个输出数据的期望值。
[0078]
本技术可选实施例中,步骤s20中,预先构建的bp神经网络模型中,隐含层节点书按下列公式计算得到:
[0079]
n1=log2n
[0080]
式中,n1为隐含层节点数;n为输入向量维数。本实施例中,采用这种方式预设节点数可以减少后续bp神经网络模型中优化参数的调整过程。
[0081]
本技术可选实施例中,输出数据还包括输出功率建议值、盾构掘进速度建议值、刀
盘扭矩建议值和刀盘转速建议值。进一步地,如图1所示,步骤s30之后还包括:
[0082]
步骤s40,根据输出数据调整盾构机的当前施工参数,得到盾构机穿越目标填土地层的施工参数,其中,盾构机的施工参数包括刀盘扭矩、输出功率、刀盘转速和掘进速度。
[0083]
本实施例中,bp神经网络模型的输出数据不仅包括块石的位置、尺寸、硬度等分布参数,还包括盾构机掘进参数建议值(即盾构掘进速度建议值、刀盘扭矩建议值和刀盘转速建议值),如此可以减少司机的工作量,降低对司机经验和主观判断的过度依赖。同时可以根据输出数据来调整盾构机当前的施工参数,得到盾构机穿越目标填土地层的施工参数,使得盾构机能顺利地破碎前方块石,避免卡刀等情况出现。
[0084]
本技术可选实施例中,如图1所示,步骤s30之后还包括:
[0085]
步骤s50,根据预测的目标填土地层中块石的分布参数,确定盾构机的施工方案(即盾构机穿越目标填土地层的方法)。
[0086]
需要说明的是,本技术中步骤s40和步骤s50的先后顺序不作限制,均在本技术的保护范围之内。
[0087]
本技术可选实施例中,步骤s50具体为:当预测的目标填土地层中块石的数量小于预设数量阈值,尺寸小于预设尺寸阈值时,确定盾构机的施工方案为盾构机直接推进通过目标填土地层的方法;当预测的目标填土地层中块石的数量大于预设数量阈值,尺寸大于预设尺寸阈值时,确定盾构机的施工方案为先对块石进行破碎处理,再将破碎后的块石取出,之后盾构机推进通过。本实施例中,在目标填土地层中块石的数量大于预设数量阈值,尺寸大于预设尺寸阈值时,可以利用爆破或其他工法将块石破碎处理。
[0088]
需要说明的是,预设数量阈值和预设尺寸阈值是用户根据实际情况来确定,可选地,预设数量阈值为2-3,预设尺寸阈值为30-35cm,当然地,具体情况也可根据孤石具体大小进行调整。进一步地,本技术还提供了一种填土地层中块石分布的预测系统。
[0089]
图2为根据本技术的另一些实施例提供的填土地层中块石分布的预测系统的功能框图,如图3所示,本技术的预测系统包括:采集单元100、训练单元200和预测单元300,其中,采集单元100配置为采集与目标填土地层同一施工掘进隧道中盾构机的前期施工数据作为样本数据,其中,所述样本数据包括盾构机前期施工中的盾构机参数和填土地层的地质参数;训练单元200配置为基于采集的样本数据对预先构建的bp神经网络模型进行训练,得到训练完成的bp神经网络模型;预测单元300配置为基于训练完成的bp神经网络模型,以采集的目标填土地层的当前地质参数和当前盾构机参数作为输入数据,根据输出数据预测目标填土地层中块石的分布参数,其中,块石的分布参数包括块石尺寸、块石硬度和块石的位置。
[0090]
进一步地,本技术的预测系统还包括调整单元400和确定单元500,调整单元400配置为根据输出数据调整盾构机的当前施工参数,得到盾构机穿越目标填土地层的施工参数,其中,盾构机的施工参数包括刀盘扭矩、输出功率、刀盘转速和掘进速度;确定单元500配置为根据预测的目标填土地层中块石的分布参数,确定盾构机的施工方案。
[0091]
本技术实施例提供的填土地层中块石分布的预测系统能够实现上述任一实施例的填土地层中块石分布的预测方法的流程、步骤,并达到相同的有益效果,在此不再一一赘述。
[0092]
以上所述仅为本技术的优选实施例,并不用于限制本技术,对于本领域的技术人
员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1