一种混凝土远程监控浇筑管理系统及方法与流程
1.本发明属于混凝土施工管理技术领域,具体涉及一种混凝土远程监控浇筑管理系统及方法。
背景技术:
2.随着国民经济飞跃发展,国家投入基础建设的力度日益增强,基础建设中耗资比重最大的内容如钢材和混凝土,而混凝土的质量直接关系着政府投资的质量和经济效益,由于混凝土产品生产性质的特殊性,混凝土的质量受到原材料配方生产工艺、运输条件、使用环境、维护措施、天气变化等诸多条件的影响,混凝土产品质量直接影响到国家投资的经济效果和建设质量,并关系到人民的生命财产安全,目前,混凝土生产虽然已有了先进的自动化控制系统进行管理,但在成品管理、运输和施工方面仍停留在相对松散的状态,各个相关环节基本上还是采用人工管理模式来进行,无法对混凝土质量进行全程的实时监控。
3.射频识别(即radio frequency identification,以下简称rfid)技术是一项利用射频信号通过空间耦合实现无接触信息传递并通过所传递的信息达到识别目的的技术。它将特殊的信息编码写入电子标签,标签被粘贴在需要识别的目标上。rfid具有条形码不具备的防水防磁、耐高温、无需光源,甚至可以透过外部材料读取数据;使用寿命长;能在恶劣环境下工作;能够轻易嵌入或附着在不同形状、类型的产品上;读取距离更远;可以写入及存取数据,写入时间比条码少;标签的内容可以动态改变;能够同时处理多个标签;标签的数据存取有密码保护,安全性更高;可以对rfid标签所附着的物体进行跟踪定位等优点。因此,rfid技术能很好的适用于混凝土生产、运输、施工、保养这样的特殊环境。
4.公开号为cn108399519b的中国专利公开了一种混凝土搅拌站信息化管理系统,包括信息化设备子系统和信息化管理子系统;信息化设备子系统包括原材料监控设备、站内车辆指引设备、站内车辆监控设备和运货统计设备;原材料监控设备、站内车辆指引设备、站内车辆监控设备和运货统计设备均与信息化管理子系统连接;信息化管理子系统,用于将信息化设备子系统的数据进行整合,并结合加工订单,对混凝土搅拌站的加工、运输、监控和结算工作进行信息化统一管控。该专利将原材料监控设备、站内车辆指引设备、站内车辆监控设备和运货统计设备的数据整合到同一个信息化管理子系统中,实现了硬件设备与软件管理的交互,方便于财务结算、报表生成,给混凝土搅拌站的工作带来了诸多便利。该专利虽然提供了一种混凝土信息化管理系统,但是该系统只能在搅拌站站内使用,无法全程监控混凝土运输车从搅拌站到施工现场的过程,无法很好地建立搅拌站与施工现场的信息互通。
技术实现要素:
5.本发明的目的是针对现有技术存在的问题,提供一种混凝土远程监控浇筑管理系统及方法。
6.为实现上述目的,本发明采用的技术方案是:
7.一种混凝土远程监控浇筑管理系统,包括后台服务器、监控终端、rfid芯片和rfid读写器,所述监控终端、rfid读写器分别与后台服务器通过互联网通信连接;
8.所述rfid芯片安装在混凝土运输车上,用于存储车辆信息和混凝土信息;
9.所述rfid读写器设有两个,其中一个设在混凝土搅拌站,另一个设在施工现场;
10.所述后台服务器用于存储所有的车辆信息和混凝土信息,以及为监控终端提供人机交互网页和/或软件;
11.所述监控终端用于管理人员远程查看各混凝土运输车的车辆信息及对应的混凝土信息;
12.所述混凝土运输车从混凝土搅拌站获取混凝土,位于混凝土搅拌站的rfid读写器读取混凝土运输车的车辆信息,并将当前混凝土搅拌站输出的混凝土的信息写入rfid芯片,同时将当前车辆信息和对应的混凝土信息打包上传到后台服务器,所述后台服务器将车辆信息和对应的混凝土信息实时发布到监控终端;当混凝土运输车到达施工现场后,位于施工现场的rfid读写器会读取车辆的rfid芯片,获取当前车辆信息和对应的混凝土信息;施工现场的混凝土浇注设备根据获取到的混凝土信息与对应的混凝土运输车对接。
13.本发明的管理系统基于rfid射频识别技术,将混凝土运输车辆信息和混凝土信息存储在rfid芯片内,并通过施工现场的rfid读写器来识别车辆信息和混凝土信息,无需在施工现场查验混凝土信息,从而提高了混凝土施工效率;管理者可以通过监控终端远程实时监控混凝土及运输车辆在运输途中的各种信息,为混凝土运输车辆调度、管理等提供了数据支撑。
14.具体地,所述后台服务器包括组态服务器、云端数据库和web服务器;
15.所述组态服务器用于为监控终端提供app应用程序;
16.所述云端数据库用于存储所有的车辆信息和混凝土信息;
17.所述web服务器用于为监控终端提供人机交互网页。
18.具体地,所述车辆信息包括车牌号和车辆的位置信息;所述混凝土运输车上安装有定位模块,所述混凝土运输车的主控系统将定位模块获取的位置信息实时上传到后台服务器;后台服务器可以根据车辆的当前位置信息以及车速信息预测车辆到达施工现场的时间,从而方便施工现场的进度管控。
19.具体地,所述混凝土信息包括混凝土的标号、方量、离站时间、保质期,管理者可根据混凝土的离站时间和当前时间判断混凝土是否过保质期,从而保证混凝土的质量;管理者也可以根据混凝土的标号、方量信息以及施工现场的需求对各混凝土运输车进行调度,提高混凝土施工效率。
20.具体地,所述监控终端包括手机、电脑、工控机中的一种或多种。
21.具体地,所述施工现场设有无人值守地磅,所述施工现场的rfid读写器安装在无人值守地磅处,所述无人值守地磅用于对混凝土运输车进行称重;混凝土运输车达到施工现场后,首先要经过无人值守地磅进行称重,同时读取车辆的rfid芯片,获取车辆信息和混凝土信息。
22.具体地,所述施工现场还设有电子展示牌,所述电子展示牌与后台服务器连接,所述后台服务器将运输中的车辆信息和对应的混凝土信息同步发布到电子展示牌上进行展示;所述电子展示牌上还显示有各施工部位需要的混凝土标号种类以及各类标号的混凝土
需求方量;位于现场的管理人员也可根据电子展示牌灵活调整施工方案。
23.与上述管理系统相对应的,本发明还提供了一种混凝土远程监控浇筑管理方法,包括以下步骤:
24.s1,当混凝土运输车从混凝土搅拌站获取混凝土时,通过位于混凝土搅拌站的rfid读写器读取混凝土运输车的车辆信息,并将当前混凝土搅拌站输出的混凝土的信息写入rfid芯片,同时将当前车辆信息和对应的混凝土信息打包上传到后台服务器;
25.s2,所述后台服务器将车辆信息和对应的混凝土信息实时发布到监控终端和施工现场的电子展示牌;
26.s3,当混凝土运输车驶离混凝土搅拌站后,混凝土运输车的主控系统将定位模块获取的位置信息实时上传到后台服务器,后台服务器将车辆当前的位置信息同步发布至监控终端和施工现场的电子展示牌;
27.s4,当混凝土运输车到达施工现场后,位于施工现场的rfid读写器会读取车辆的rfid芯片,获取当前车辆信息和对应的混凝土信息;
28.s5,施工现场的混凝土浇注设备根据获取到的混凝土信息与对应的混凝土运输车对接。
29.与现有技术相比,本发明的有益效果是:本发明的管理系统基于rfid射频识别技术,将混凝土运输车辆信息和混凝土信息存储在rfid芯片内,并通过施工现场的rfid读写器来识别车辆信息和混凝土信息,无需在施工现场查验混凝土信息,从而提高了混凝土施工效率;管理者可以通过监控终端远程实时监控混凝土及运输车辆在运输途中的各种信息,为混凝土运输车辆调度、管理等提供了数据支撑。
附图说明
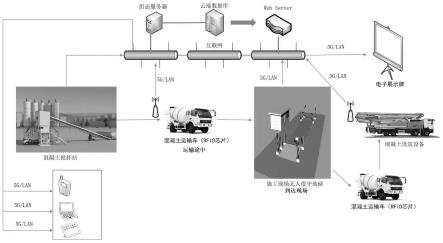
30.图1为本发明一种混凝土远程监控浇筑管理系统的架构示意图。
具体实施方式
31.下面将结合本发明中的附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动条件下所获得的所有其它实施例,都属于本发明保护的范围。
32.如图1所示,本实施例提供了一种混凝土远程监控浇筑管理系统,包括后台服务器、监控终端、rfid芯片和rfid读写器,所述监控终端、rfid读写器分别与后台服务器通过互联网通信连接;
33.所述rfid芯片安装在混凝土运输车上,用于存储车辆信息和混凝土信息;
34.所述rfid读写器设有两个,其中一个设在混凝土搅拌站,另一个设在施工现场;
35.所述后台服务器用于存储所有的车辆信息和混凝土信息,以及为监控终端提供人机交互网页和/或软件;
36.所述监控终端用于管理人员远程查看各混凝土运输车的车辆信息及对应的混凝土信息;
37.所述混凝土运输车从混凝土搅拌站获取混凝土,位于混凝土搅拌站的rfid读写器
读取混凝土运输车的车辆信息,并将当前混凝土搅拌站输出的混凝土的信息写入rfid芯片,同时将当前车辆信息和对应的混凝土信息打包上传到后台服务器,所述后台服务器将车辆信息和对应的混凝土信息实时发布到监控终端;当混凝土运输车到达施工现场后,位于施工现场的rfid读写器会读取车辆的rfid芯片,获取当前车辆信息和对应的混凝土信息;施工现场的混凝土浇注设备根据获取到的混凝土信息与对应的混凝土运输车对接。
38.本发明的管理系统基于rfid射频识别技术,将混凝土运输车辆信息和混凝土信息存储在rfid芯片内,并通过施工现场的rfid读写器来识别车辆信息和混凝土信息,无需在施工现场查验混凝土信息,从而提高了混凝土施工效率;管理者可以通过监控终端远程实时监控混凝土及运输车辆在运输途中的各种信息,为混凝土运输车辆调度、管理等提供了数据支撑。
39.具体地,所述后台服务器包括组态服务器、云端数据库和web服务器;
40.所述组态服务器用于为监控终端提供app应用程序;
41.所述云端数据库用于存储所有的车辆信息和混凝土信息;
42.所述web服务器用于为监控终端提供人机交互网页。
43.具体地,所述车辆信息包括车牌号和车辆的位置信息;所述混凝土运输车上安装有定位模块,所述混凝土运输车的主控系统将定位模块获取的位置信息实时上传到后台服务器;后台服务器可以根据车辆的当前位置信息以及车速信息预测车辆到达施工现场的时间,从而方便施工现场的进度管控。
44.具体地,所述混凝土信息包括混凝土的标号、方量、离站时间、保质期,管理者可根据混凝土的离站时间和当前时间判断混凝土是否过保质期,从而保证混凝土的质量;管理者也可以根据混凝土的标号、方量信息以及施工现场的需求对各混凝土运输车进行调度,提高混凝土施工效率。
45.具体地,所述监控终端包括手机、电脑、工控机。
46.具体地,所述施工现场设有无人值守地磅,所述施工现场的rfid读写器安装在无人值守地磅处,所述无人值守地磅用于对混凝土运输车进行称重;混凝土运输车达到施工现场后,首先要经过无人值守地磅进行称重,同时读取车辆的rfid芯片,获取车辆信息和混凝土信息。
47.具体地,所述施工现场还设有电子展示牌,所述电子展示牌与后台服务器连接,所述后台服务器将运输中的车辆信息和对应的混凝土信息同步发布到电子展示牌上进行展示;所述电子展示牌上还显示有各施工部位需要的混凝土标号种类以及各类标号的混凝土需求方量;位于现场的管理人员也可根据电子展示牌灵活调整施工方案。
48.与上述管理系统相对应的,本实施例还提供了一种混凝土远程监控浇筑管理方法,包括以下步骤:
49.s1,当混凝土运输车从混凝土搅拌站获取混凝土时,通过位于混凝土搅拌站的rfid读写器读取混凝土运输车的车辆信息,并将当前混凝土搅拌站输出的混凝土的信息写入rfid芯片,同时将当前车辆信息和对应的混凝土信息打包上传到后台服务器;
50.s2,所述后台服务器将车辆信息和对应的混凝土信息实时发布到监控终端和施工现场的电子展示牌;
51.s3,当混凝土运输车驶离混凝土搅拌站后,混凝土运输车的主控系统将定位模块
获取的位置信息实时上传到后台服务器,后台服务器将车辆当前的位置信息同步发布至监控终端和施工现场的电子展示牌;
52.s4,当混凝土运输车到达施工现场后,位于施工现场的rfid读写器会读取车辆的rfid芯片,获取当前车辆信息和对应的混凝土信息;
53.s5,施工现场的混凝土浇注设备根据获取到的混凝土信息与对应的混凝土运输车对接。
54.本实施例中,混凝土运输车从混凝土搅拌站出发到达施工现场,在运输途中,后台服务器能够结合高德地图对在施工现场内外的混凝土运输车进行交通组织,并且能够通过云端al计算出混凝土应浇筑的结构位置、浇筑所需混凝土的规格数量、混凝土运输车的发车时间以及混凝土运输车如何排队运输等。
55.本实施例中,某标号混凝土运输车的发车数量的计算公式为:
56.n=v/m
57.其中,n为某标号混凝土运输车的发车数量;v为某标号混凝土的总方量;m为混凝土运输车的承载量。
58.剩余某标号混凝土运输车发车数量的计算公式为:
59.n1=n-n260.其中,n1为剩余某标号混凝土运输车发车数量;n2为已经完成浇筑的混凝土运输车发车数量。
61.混凝土运输车发车时间的计算公式为:
62.t=t1+v1/v+t263.其中,t为混凝土运输车发车时间;t1为混凝土运输车的出发时间;t2为混凝土运输车从混凝土搅拌站到施工现场需要的路程时间;v1为已经到达施工现场的混凝土量;v为施工现场的混凝土浇注速度。
64.混凝土运输车从混凝土搅拌站到施工现场需要的路程时间的计算公式为:
65.t2=l/s+t366.其中,l为从混凝土搅拌站到施工现场的总路程;s为混凝土运输车的平均车速;t3为红绿灯等待时间(根据高德地图估算得到)。
67.施工现场混凝土车的排队顺序计算方法为:
68.t4=t5+t669.其中,t5为施工现场某标号混凝土的浇筑完成时间;t6为该标号混凝土的初凝时间;t4为该标号混凝土对应的下一辆混凝土运输车到达施工现场的时间。
70.上述实施例阐明的平台、系统、终端、模块或单元,具体可以由计算机芯片或实体实现,或者由具有某种功能的产品来实现。一种典型的实现设备为计算机。具体的,计算机例如可以为个人计算机、膝上型计算机、蜂窝电话、相机电话、智能电话、个人数字助理、媒体播放器、导航设备、电子邮件设备、游戏控制台、平板计算机、可穿戴设备或者这些设备中的任何设备的组合。
71.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机
可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
72.本发明是参照根据本发明实施例的方法、平台(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
73.本说明书可以在由计算机执行的计算机可执行指令的一般上下文中描述,例如程序模块。一般地,程序模块包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、组件、数据结构等等。也可以在分布式计算环境中实践本说明书,在这些分布式计算环境中,由通过通信网络而被连接的远程处理设备来执行任务。在分布式计算环境中,程序模块可以位于包括存储设备在内的本地和远程计算机存储介质中。
74.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
75.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。在一个典型的配置中,计算机包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
76.内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash ram)。内存是计算机可读介质的示例。
77.计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带、磁盘存储、量子存储器、基于石墨烯的存储介质或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
78.在本说明书的描述中,参考术语“一个实施方式”、“某些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
79.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1