一种基于定位曲线相似性的路线轨迹匹配方法与流程
1.本发明涉及轨迹匹配技术领域,尤其是一种基于定位曲线相似性的路线轨迹匹配方法。
背景技术:
2.随着网约车市场不断发展,监管问题尤为突出。目前,监管部门为了加强监管,要求网约车必须加装卫星定位装置(车载终端),且驾驶员与车辆必须在监管部门注册备案。但是如何规范驾驶员与网约车之间的对应关系,如何解决网约车的规范性和安全性的难题,是目前监管部门亟需解决的问题。
技术实现要素:
3.为了克服上述现有技术中的缺陷,本发明提供一种基于定位曲线相似性的路线轨迹匹配方法,用于判断车载终端行驶轨迹和网约车驾驶员手机app移动轨迹是否匹配,从而确定是否出现了非法运营。
4.为实现上述目的,本发明采用以下技术方案,包括:
5.一种基于定位曲线相似性的路线轨迹匹配方法,包括以下步骤:
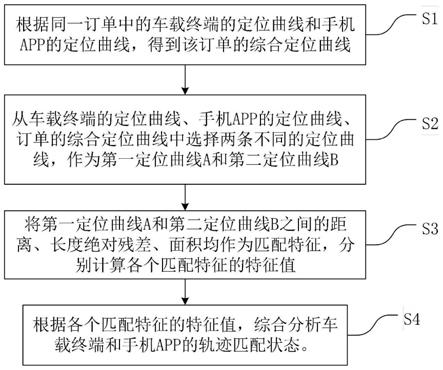
6.s1,获取同一订单中的车载终端的定位曲线和手机app的定位曲线;所述定位曲线包括按照时间顺序排序的一系列定位点;车载终端的定位点和手机app的定位点均为订单的定位点,将订单的定位点按照时间顺序进行排序,得到该订单的综合定位曲线;
7.s2,从车载终端的定位曲线、手机app的定位曲线、订单的综合定位曲线中选择两条不同的定位曲线,作为第一定位曲线a和第二定位曲线b;
8.s3,将第一定位曲线a和第二定位曲线b之间的距离、长度绝对残差、面积均作为匹配特征,分别计算各个匹配特征的特征值;
9.s4,根据各个匹配特征的特征值,综合分析车载终端和手机app的轨迹匹配状态。
10.步骤s1的具体过程如下所示;
11.s11,根据订单号分别获取对应订单下的车载终端和和手机app的轨迹即定位曲线;
12.s12,车载终端的定位点和手机app的定位点均为订单的定位点,将订单的定位点按照时间顺序进行排序,得到该订单的综合定位曲线;
13.s13,根据步骤s12得到的订单的综合定位曲线进行订单核实,具体如下所示:
14.若订单的综合定位曲线中,仅存在车载终端的定位点,或仅存在手机app的定位点,则不对该订单进行轨迹匹配;
15.若订单的综合定位曲线中,订单的定位点总数量少于设定数量,则不对该订单进行轨迹匹配;
16.若订单的综合定位曲线中,车载终端的定位点和手机app的定位点在时间上不存在交集,则不对该订单进行轨迹匹配;
17.其他情况下,则表示该订单经过核实,对该订单进行轨迹匹配;
18.s14,对核实后的订单进行数据格式统一,即将车载终端的定位点和手机app的定位点的坐标格式进行统一;
19.s15,对订单的综合定位曲线进行修正,得到修正后的订单的综合定位曲线,具体如下所示:
20.订单的综合定位曲线包括按照时间顺序排序的一系列定位点,订单的定位点序列{c1,c2,c3,
…ck
},即{ck|k=1,2,3,
…
k},ck表示订单的综合定位曲线中第k个定位点的空间位置;
21.依次对订单的综合定位曲线中的各个定位点进行位置调整,其中,对第k个定位点的位置调整方式如下所示:
22.其中,若k=1,即定位点序列中的第1个定位点,则对该第1个定位点不进行前向的位置调整,直接进行后向的位置调整,跳转执行步骤s152;
23.若k≠1,则按照如下步骤对第k个定位点进行位置调整:
24.s151,对第k个定位点进行前向的位置调整:将第k个定位点与相邻的前一个定位点即第k-1个定位点进行第1次前向位置交换,计算第1次前向位置交换后的综合定位曲线的长度:
25.若第1次前向位置交换后的综合定位曲线的长度未减小,则跳转步骤s152;
26.若第1次前向位置交换后的综合定位曲线的长度减小,则继续与相邻的前一个定位点即第k-2个进行第2次前向位置交换,计算第2次前向位置交换后的综合定位曲线的长度,若第2次前向位置交换后的综合定位曲线的长度继续减小,则继续与相邻的前一个定位点进行前向位置交换,直至某次前向位置交换后的综合定位曲线的长度不再减小,则不再对该第k个定位点进行该次的前向位置交换,该第k个定位点的位置调整结束;或者,直至第k个定位点已经与第1个定位点进行前向位置交换,则不再对该第k个定位点继续进行前向位置交换,该第k个定位点的位置调整结束;
27.s152,若k=k,即定位点序列中的最后1个定位点即第k个定位点,则不对第k个定位点进行后向的位置调整,即保持原位;
28.若k≠k,则对第k个定位点进行后向的位置调整:将第k个定位点与相邻的后一个定位点即第k+1个定位点进行第1次后向位置交换,计算第1次后向位置交换后的综合定位曲线的长度;其中,若第1次后向位置交换后的综合定位曲线的长度未减小,则不对第k个定位点进行位置调整,即保持原位;
29.若第1次后向位置交换后的综合定位曲线的长度减小,则继续与相邻的后一个定位点即第k+2个进行第2次后向位置交换,计算第2次后向位置交换后的综合定位曲线的长度,若第2次后向位置交换后的综合定位曲线的长度继续减小,则继续与相邻的后一个定位点进行后向位置交换,直至某次后向位置交换后的综合定位曲线的长度不再减小,则不再对该第k个定位点进行该次的后向位置交换,该第k个定位点的位置调整结束;或者,直至第k个定位点已经与第k个定位点进行后向位置交换,则不再对该第k个定位点继续进行后向位置交换,该第k个定位点的位置调整结束;
30.经位置调整后的综合定位曲线即为修正后的订单的综合定位曲线。
31.步骤s2中,定位曲线的选择方式为:
32.若车载终端的定位点数量和手机app的定位点数量的比值,小于设定阈值γ,则选择订单的综合定位曲线和手机app的定位曲线;
33.若手机app的定位点数量和车载终端的定位点数量的比值,小于设定阈值γ,则选择订单的综合定位曲线作和车载终端的定位曲线;
34.其他情况下,选择手机app的定位曲线和车载终端的定位曲线。
35.阈值γ≥1。
36.步骤s3中,第一定位曲线a和第二定位曲线b之间的距离,包括hausdorff距离和fr
é
chet距离;
37.第一定位曲线a和第二定位曲线b之间的hausdorff距离即δh(a,b),计算方式如下所示:
38.设:第一定位曲线a中共包括p个定位点,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,a
p
},即{a
p
|p=1,2,3,
…
,p},a
p
表示第一定位曲线a中第p个定位点的空间位置;第二定位曲线b中共包括q个定位点,第二定位曲线b的定位点序列为{b1,b2,b3,
…
,bq},即{bq|q=1,2,3,
…
,q},bq表示第二定位曲线b的第q个定位点的空间位置;
39.δh(a,b)=max(h(a,b),h(b,a));
[0040][0041][0042]
式中,d(a
p
,bq)表示第一定位曲线a中第p个定位点的空间位置a
p
和第二定位曲线b中第q个定位点的空间位置bq之间的欧式距离;
[0043]
第一定位曲线a和第二定位曲线b之间的fr
é
chet距离即δf(a,b),计算方式如下所示:
[0044]
设:第一定位曲线a的总路径长度为n,第二定位曲线b的总路径长度为m,第一定位曲线a的路径长度函数为α(t),即t时刻下第一定位曲线a的路径长度为α(t);第二定位曲线b的路径长度函数为β(t),即t时刻下第二定位曲线b的路径长度为β(t);
[0045]
定义时间t∈[0,1],则α(0)=0,α(1)=n;β(0)=0,β(1)=m;
[0046]
fa(α(t))表示在第一定位曲线a中t时刻所处的空间位置;fb(β(t))表示第二定位曲线b中t时刻所处的空间位置;
[0047][0048]
d(fa(α(t)),fb(β(t)))表示第一定位曲线a中t时刻所处的空间位置fa(α(t))和第二定位曲线b中t时刻所处的空间位置fb(β(t))之间的欧式距离。
[0049]
步骤s3中,第一定位曲线a和第二定位曲线b之间的长度绝对残差δ
l
(a,b的计算方式如下所示:
[0050]
设:第一定位曲线a中共包括p个定位点,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,a
p
},即{a
p
|p=1,2,3,
…
,p},a
p
表示第一定位曲线a中第p个定位点的空间位置;第二定位曲线b中共包括q个定位点,第二定位曲线b的定位点序列为{b1,b2,b3,
…
,bq},即{bq|q
=1,2,3,
…
,q},bq表示第二定位曲线b的第q个定位点的空间位置;
[0051]
δ
l
(a,b)=|l
a-lb|;
[0052][0053][0054]
d(ai,a
i+1
)表示第一定位曲线a中第i个定位点的空间位置ai和第i+1个定位点的空间位置a
i+1
之间的欧式距离;d(bj,b
j+1
)表示第二定位曲线b中第i个定位点的空间位置bj和第i+1个定位点的空间位置b
j+1
之间的欧式距离。
[0055]
步骤s3中,第一定位曲线a和第二定位曲线b之间的面积δs(a,b)的计算方式如下所示:
[0056]
若两条定位曲线中的定位点数量不同,则对定位点数量较少的定位曲线进行插值处理,使得两条定位曲线中的定位点数量数量相同;若两条定位曲线中的定位点数量相同,则无需进行插值处理;
[0057]
设:第一定位曲线a和第二定位曲线b中的定位点数量均为u,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,au},即{au|u=1,2,3,
…
,u},au表示第一定位曲线a中第u个定位点的空间位置;第二定位曲线b的定位点序列为b1,b2,b3,
…
,bu},即{bu|u=1,2,3,
…
,u},bu表示第二定位曲线b的第u个定位点的空间位置;
[0058][0059]
式中,s(ai,a
i+1
,bi,b
i+1
)表示第一定位曲线a中的第i个定位点、第i+1个定位点,以及第二定位曲线b中的第i个定位点、第i+1个定位点构成的高斯面积。
[0060]
通过对连续的两个定位点之间插中值的方式进行插值处理。
[0061]
步骤s4中,轨迹匹配状态的综合分析方法,具体如下所示:
[0062]
s41,针对各个匹配特征即两条定位曲线之间的距离、长度绝对残差、面积,分别设置对应的阈值,即距离阈值、长度绝对残差阈值、面积阈值;
[0063]
s42,将步骤s3计算得到的各个匹配特征的特征值分别与对应的阈值分别进行比较,若某匹配特征的特征值大于对应的阈值,则表示该匹配特征为匹配失败;否则表示该匹配特征为匹配成功;
[0064]
s43,根据各个匹配特征的匹配结果,综合分析车载终端和手机app的轨迹匹配不匹配:
[0065]
若匹配失败的匹配特征个数达到设定数量,则判定车载终端和手机app的轨迹不匹配;若匹配失败的匹配特征个数未达到设定数量,则判定车载终端和手机app的轨迹匹配。
[0066]
本发明的优点在于:
[0067]
(1)本发明根据车载终端的定位曲线和手机app的定位曲线综合,生成订单的综合定位曲线,并对基于时间序列特征的订单的综合定位曲线进行修正,得到更加准确的综合定位曲线。
[0068]
(2)本发明根据车载终端的定位曲线和手机app的定位曲线中的定位点数量,从三条定位曲线中选择两条定位曲线作为输入进行轨迹匹配的分析,实现了基于统一时间序列
特征对两条曲线相似度进行分析,且从时间和空间的维度对轨迹的匹配进行分析,提高了匹配的准确度。
[0069]
(3)本发明选择两条定位曲线之间的距离、长度绝对残差、面积均作为匹配特征,提高了匹配的准确度。且鉴于手机端与车载端匹配时存在采样频率不一致的问题,我们对hausdorff距离算法进行了改进,并修改了其返回值,以便可以更好地应用于轨迹之间不匹配的检测。
[0070]
(4)本发明所设置的车载终端和手机app的轨迹匹配状态的综合分析判断的方法,将投票组合策略用于集成学习中,提高了综合分析的准确率。
附图说明
[0071]
图1为本发明的方法流程图。
[0072]
图2a为带有时间偏差的一系列定位点的示意图。
[0073]
图2b为按照时间顺序排序的定位点序列即按照时间顺序排序得到的订单的综合定位曲线示意图。
[0074]
图3a为订单的综合定位曲线中时间为t3的定位点位置调整后的示意图。
[0075]
图3b为修正后的订单的综合定位曲线的示意图。
[0076]
图4为本发明的数据处理流向图。
具体实施方式
[0077]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0078]
由图1和图4所示,本发明的一种基于定位曲线相似性的路线轨迹匹配方法,包括以下步骤:
[0079]
s1,获取同一订单中的车载终端的定位曲线和手机app的定位曲线;所述定位曲线包括按照时间顺序排序的一系列定位点;车载终端的定位点和手机app的定位点均为订单的定位点,将订单的定位点按照时间顺序进行排序,得到该订单的综合定位曲线。
[0080]
步骤s1的具体过程如下所示:
[0081]
s11,根据订单号分别获取对应订单下的车载终端和和手机app的轨迹即定位曲线;
[0082]
s12,车载终端的定位点和手机app的定位点均为订单的定位点,将订单的定位点按照时间顺序进行排序,得到该订单的综合定位曲线;
[0083]
s13,根据步骤s12得到的订单的综合定位曲线进行订单核实,具体如下所示:
[0084]
若订单的综合定位曲线中,仅存在车载终端的定位点,或仅存在手机app的定位点,则不对该订单进行轨迹匹配;
[0085]
若订单的综合定位曲线中,订单的定位点总数量少于设定数量,则不对该订单进行轨迹匹配;
[0086]
若订单的综合定位曲线中,车载终端的定位点和手机app的定位点在时间上不存
在交集,则不对该订单进行轨迹匹配;
[0087]
其他情况下,则表示该订单经过核实,对该订单进行轨迹匹配;
[0088]
s14,对核实后的订单进行数据格式统一,即将车载终端的定位点和手机app的定位点的坐标格式统一;
[0089]
s15,对订单的综合定位曲线进行修正,具体如下所示:
[0090]
订单的综合定位曲线包括按照时间顺序排序的一系列定位点,订单的定位点序列{c1,c2,c3,
…ck
},即{ck|k=1,2,3,
…
k},ck表示订单的综合定位曲线中第k个定位点的空间位置;
[0091]
依次对订单的综合定位曲线中的各个定位点进行位置调整,其中,对第k个定位点的位置调整方式如下所示:
[0092]
其中,若k=1,即定位点序列中的第1个定位点,则对该第1个定位点不进行前向的位置调整,直接进行后向的位置调整,跳转执行步骤s152;
[0093]
若k≠1,则按照如下步骤对第k个定位点进行位置调整:
[0094]
s151,对第k个定位点进行前向的位置调整:将第k个定位点与相邻的前一个定位点即第k-1个定位点进行第1次前向位置交换,计算第1次前向位置交换后的综合定位曲线的长度:
[0095]
若第1次前向位置交换后的综合定位曲线的长度未减小,则跳转步骤s152;
[0096]
若第1次前向位置交换后的综合定位曲线的长度减小,则继续与相邻的前一个定位点即第k-2个进行第2次前向位置交换,计算第2次前向位置交换后的综合定位曲线的长度,若第2次前向位置交换后的综合定位曲线的长度继续减小,则继续与相邻的前一个定位点进行前向位置交换,直至某次前向位置交换后的综合定位曲线的长度不再减小,则不再对该第k个定位点进行该次的前向位置交换,该第k个定位点的位置调整结束;或者,直至第k个定位点已经与第1个定位点进行前向位置交换,则不再对该第k个定位点继续进行前向位置交换,该第k个定位点的位置调整结束;
[0097]
s152,若k=k,即定位点序列中的最后1个定位点即第k个定位点,则不对第k个定位点进行后向的位置调整,即保持原位;
[0098]
若k≠k,则对第k个定位点进行后向的位置调整:将第k个定位点与相邻的后一个定位点即第k+1个定位点进行第1次后向位置交换,计算第1次后向位置交换后的综合定位曲线的长度;其中,若第1次后向位置交换后的综合定位曲线的长度未减小,则不对第k个定位点进行位置调整,即保持原位;
[0099]
若第1次后向位置交换后的综合定位曲线的长度减小,则继续与相邻的后一个定位点即第k+2个进行第2次后向位置交换,计算第2次后向位置交换后的综合定位曲线的长度,若第2次后向位置交换后的综合定位曲线的长度继续减小,则继续与相邻的后一个定位点进行后向位置交换,直至某次后向位置交换后的综合定位曲线的长度不再减小,则不再对该第k个定位点进行该次的后向位置交换,该第k个定位点的位置调整结束;或者,直至第k个定位点已经与第k个定位点进行后向位置交换,则不再对该第k个定位点继续进行后向位置交换,该第k个定位点的位置调整结束;
[0100]
本实施例中,由于每次点的移动只改变该点与其相邻点之间的距离,因此可以通过计算两个点的距离变化,来判断位置交换后的综合定位曲线的长度变化。
[0101]
经位置调整后的综合定位曲线即为修正后的订单的综合定位曲线。
[0102]
本实施例中,图2和图3中,三角形点为车载终端的定位点,圆形点是手机app的定位点,三角形点和圆形点的位置顺序为定位点的空间位置顺序;三角形点和圆形点的箭头顺序为定位点的时间顺序,其中,定位点的时间顺序为:t1《t2《t3《t4《t5《t6,由图2b可知,根据定位点的时间顺序进行排序得到的综合定位曲线不是最合适的路径,由图3a和图3b可知,修正后的订单的综合定位曲线为最合适的路径。
[0103]
s2,从车载终端的定位曲线、手机app的定位曲线、订单的综合定位曲线中选择两条不同的定位曲线,作为第一定位曲线a和第二定位曲线b。
[0104]
步骤s2中,定位曲线的选择方式为:
[0105]
若车载终端的定位点数量和手机app的定位点数量的比值,小于设定阈值γ,即则选择订单的综合定位曲线和手机app的定位曲线;
[0106]
若手机app的定位点数量和车载终端的定位点数量的比值,小于设定阈值γ,即则选择订单的综合定位曲线作和车载终端的定位曲线;
[0107]
其他情况下,选择手机app的定位曲线和车载终端的定位曲线。
[0108]
其中,阈值γ≥1。
[0109]
s3,将第一定位曲线a和第二定位曲线b之间的距离、长度绝对残差、面积均作为匹配特征,分别计算各个匹配特征的特征值。
[0110]
步骤s3中,第一定位曲线a和第二定位曲线b之间的距离,包括hausdorff距离和fr
é
chet距离;
[0111]
第一定位曲线a和第二定位曲线b之间的hausdorff距离即δh(a,b),计算方式如下所示:
[0112]
设:第一定位曲线a中共包括p个定位点,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,a
p
},即{a
p
|p=1,2,3,
…
,p},a
p
表示第一定位曲线a中第p个定位点的空间位置;第二定位曲线b中共包括q个定位点,第二定位曲线b的定位点序列为{b1,b2,b3,
…
,bq},即{bq|q=1,2,3,
…
,q},bq表示第二定位曲线b的第q个定位点的空间位置;
[0113]
δh(a,b)=max(h(a,b),h(b,a));
[0114][0115][0116]
式中,d(a
p
,bq)表示第一定位曲线a中第p个定位点的空间位置a
p
和第二定位曲线b中第q个定位点的空间位置bq之间的欧式距离;
[0117]
第一定位曲线a和第二定位曲线b之间的fr
é
chet距离即δf(a,b),计算方式如下所示:
[0118]
设:第一定位曲线a的总路径长度为n,第二定位曲线b的总路径长度为m,第一定位曲线a的路径长度函数为α(t),即t时刻下第一定位曲线a的路径长度为α(t);第二定位曲线b的路径长度函数为β(t),即t时刻下第二定位曲线b的路径长度为β(t);
[0119]
定义时间t∈[0,1],则α(0)=0,α(1)=n;β(0)=0,β(1)=m;
[0120]
fa(α(t))表示在第一定位曲线a中t时刻所处的空间位置;fb(β(t))表示第二定位曲线b中t时刻所处的空间位置;
[0121][0122]
d(fa(α(t)),fb(β(t)))表示第一定位曲线a中t时刻所处的空间位置fa(α(t))和第二定位曲线b中t时刻所处的空间位置fb(β(t))之间的欧式距离。
[0123]
步骤s3中,第一定位曲线a和第二定位曲线b之间的长度绝对残差δ
l
(a,b)的计算方式如下所示:
[0124]
设:第一定位曲线a中共包括p个定位点,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,a
p
},即{a
p
|p=1,2,3,
…
,p},a
p
表示第一定位曲线a中第p个定位点的空间位置;第二定位曲线b中共包括q个定位点,第二定位曲线b的定位点序列为{b1,b2,b3,
…
,bq},即{bq|q=1,2,3,
…
,q},bq表示第二定位曲线b的第q个定位点的空间位置;
[0125]
δ
l
(a,b)=|l
a-lb|;
[0126][0127][0128]
d(ai,a
i+1
)表示第一定位曲线a中第i个定位点的空间位置ai和第i+1个定位点的空间位置a
i+1
之间的欧式距离;d(bj,b
j+1
)表示第二定位曲线b中第i个定位点的空间位置bj和第i+1个定位点的空间位置b
j+1
之间的欧式距离。
[0129]
步骤s3中,第一定位曲线a和第二定位曲线b之间的面积δs(a,b)的计算方式如下所示:
[0130]
若两条定位曲线中的定位点数量不同,则对定位点数量较少的定位曲线进行插值处理,使得两条定位曲线中的定位点数量数量相同;本实施例中,通过对连续的两个定位点之间插中值的方式进行插值处理;
[0131]
若两条定位曲线中的定位点数量相同,则无需进行插值处理;设:第一定位曲线a和第二定位曲线b中的定位点数量均为u,第一定位曲线a的定位点序列为{a1,a2,a3,
…
,au},即{au|u=1,2,3,
…
,u},au表示第一定位曲线a中第u个定位点的空间位置;第二定位曲线b的定位点序列为{b1,b2,b3,
…
,bu},即{bu|u=1,2,3,
…
,u},bu表示第二定位曲线b的第u个定位点的空间位置;
[0132][0133]
式中,s(ai,a
i+1
,bi,b
i+1
)表示第一定位曲线a中的第i个定位点、第i+1个定位点,以及第二定位曲线b中的第i个定位点、第i+1个定位点构成的高斯面积。
[0134]
s4,根据各个匹配特征的特征值,综合分析车载终端和手机app的轨迹匹配状态。
[0135]
步骤s4中,轨迹匹配状态的综合分析方法,具体如下所示:
[0136]
s41,针对各个匹配特征即两条定位曲线之间的hausdorff距离δh(a,b)、fr
é
chet距离δf(a,b)、长度绝对残差δ
l
(a,b)、面积δs(a,b),分别设置对应的阈值,即hausdorff距离
阈值γh、fr
é
chet距离阈值γf、长度绝对残差阈值γs、面积阈值γ
l
;
[0137]
s42,将步骤s3计算得到的各个匹配特征的特征值分别与对应的阈值分别进行比较,若某匹配特征的特征值大于对应的阈值,则表示该匹配特征为匹配失败;否则表示该匹配特征为匹配成功;
[0138]
s43,根据各个匹配特征的匹配结果,综合分析车载终端和手机app的轨迹匹配状态:
[0139]
若匹配失败的匹配特征个数达到设定数量,则判定车载终端和手机app的轨迹匹配状态为轨迹不匹配。若匹配失败的匹配特征个数未达到设定数量,则判定车载终端和手机app的轨迹匹配。
[0140]
本实施例中,若hausdorff距离δh(a,b)、fr
é
chet距离δf(a,b)、长度绝对残差δ
l
(a,b)、面积δs(a,b)中,存在三个或三个以上的匹配特征为匹配失败,则判定车载终端和手机app的轨迹匹配状态为轨迹不匹配。
[0141]
本实例中,匹配特征的阈值的取值方式,具体如下所示:
[0142]
将匹配特征的阈值的初始值设为0,并逐步增大该阈值,直至增大为最大值,且该最大值在实际运营中能够满足以下条件:
[0143]
匹配特征的特征值大于对应阈值的50个订单中,有5个或5个以上的订单在实际运营中存在人车轨迹不匹配;
[0144]
匹配特征的特征值小于等于对应阈值的100个订单中,随机抽取30个订单,且该30个订单在实际运营中均为人车轨迹匹配。
[0145]
本实施例中,hausdorff距离阈值γh、fr
é
chet距离阈值γf、长度绝对残差阈值γs、面积阈值γ
l
的取值分别为0.3,0.02,0.04,0.0002。
[0146]
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1