一种评估连续时间航迹跟踪算法性能的度量方法
1.本发明属于目标跟踪技术领域,具体涉及一种航迹跟踪算法性能的度量方法。
背景技术:
2.航迹估计属于目标跟踪研究的核心问题,目前国内外主流算法实现的是离散时间航迹估计,因其易受机动目标、未知输入等因素影响,一个替代方案——连续时间航迹估计已成为相关领域学者的研究热点。评估目标跟踪算法性能是否良好的关键在于度量估计航迹和真实航迹之间的“距离”,广受认可的综合度量方法包括最优子模式分配(optimal sub-pattern assignment,ospa)、ospa2、广义最优子模式分配(generalized optimal subpattern assignment,gospa)等,但以上方法均只适用于对离散时间航迹的度量,在连续时间航迹估计的研究趋势下,一种能够度量连续航迹跟踪性能的方法至关重要。
3.文献“a complete optimal subpattern assignment(cospa)metric,fusion 2020 in july 6-9,2020”提出了一种称为完整最优子模式分配的度量方法。该方法是基于ospa度量的改进方法,通过对距离误差和基数误差的阈值进行单独控制,达到了较全面地评估目标跟踪算法整体性能的效果。此外,选择小于或等于每个不可分配点的惩罚的截止值,能够克服ospa度量对两个有限点集存在一空集的情况不敏感的局限性,同时保留其用于评估多目标滤波算法性能的所有优点。然而,文献所述方法是基于两个有限点集的度量方法,仅在评估离散时间航迹领域有一定效用,并不适用于实现连续时间航迹跟踪算法性能的评估。倘若量测航迹为平滑分段多项式拟合函数,该方法则毫无效用,因此在该领域的相关评估算法有待进一步扩展。
技术实现要素:
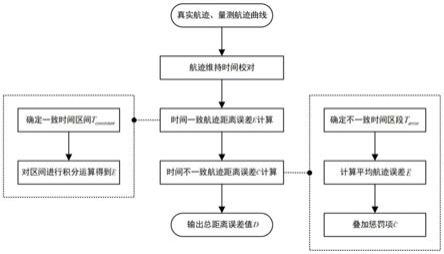
4.为了克服现有技术的不足,本发明提供了一种评估连续时间航迹跟踪算法性能的度量方法,通过一种“距离”度量基于时间轨迹函数(trajectory function of time,t-fot)模型的真实航迹与量测航迹之间的差异。该方法旨在实时、快速、合理地体现出不同跟踪算法生成的量测航迹之间的优劣之分,从而选择出最优的跟踪算法实现对目标的实时跟踪。根据航迹维持时间的差异,将量测航迹划分为一致维持航迹与不一致偏差航迹两部分,在符合数学与运动学规律的前提下,通过对一致维持航迹部分的积分运算,叠加不一致偏差航迹部分的惩罚项,得到各量测航迹与真实航迹之间的差异值。通过上述方式,本发明能够对连续时间航迹跟踪算法实现实时的性能评估,且设计简便,计算复杂度小,计算效率高。
5.本发明解决其技术问题所采用的技术方案包括如下步骤:
6.步骤1:将真实航迹与量测航迹建模为t-fot形式:
7.x
t
=f(t;λ)+e
t
8.式中,x
t
表示t时刻目标的状态,λ表示连续时间函数曲线系数,f(t;λ)表示量测航迹连续时间函数曲线,e
t
表示f(t;λ)与真实航迹连续时间函数曲线f(t)的误差;
9.步骤2:航迹维持时间校对;
10.对比量测航迹与真实航迹的起始时间和终止时间,将量测航迹与真实航迹时间序列中重合时域部分t
consistent
的航迹定义为一致维持航迹φ
consistent
,重合时域t
consistent
以外的航迹定义为不一致偏差航迹φ
error
;
11.步骤3:对于一致维持航迹φ
consistent
,计算量测航迹与真实航迹之间的一致维持航迹位置误差e:
[0012][0013]
步骤4:对于不一致偏差航迹φ
error
,定义平均航迹误差与不一致偏差航迹位置误差c分别为:
[0014][0015][0016]
其中,te
rror
表示非重合时域;
[0017]
步骤5:将一致维持航迹位置误差e与不一致偏差航迹位置误差c叠加,得到最终的连续时间航迹度量值:d=e+c,作为评估连续时间航迹跟踪算法性能的指标。
[0018]
本发明的有益效果如下:
[0019]
本发明提出一种评估连续时间航迹跟踪算法性能的度量方法,真实航迹与不同跟踪算法生成的量测航迹均基于t-fot模型建立为连续时间航迹拟合曲线,主要任务是衡量真实航迹与量测航迹之间的差异,并以一种“距离”的方式表达出来,能够实时、快速、合理地确定出与真实航迹最为相似的量测航迹。此方法主要实现了连续时间航迹跟踪算法性能的评估,更加贴合目前相关领域的发展趋势。
附图说明
[0020]
图1是本发明方法的流程图。
[0021]
图2是本发明方法的原理图。
[0022]
图3是本发明实施例的仿真场景。
[0023]
图4是本发明实施例的仿真结果。
具体实施方式
[0024]
下面结合附图和实施例对本发明进一步说明。
[0025]
如图1所示,一种评估连续时间航迹跟踪算法性能的度量方法,包括如下步骤:
[0026]
步骤1:将真实航迹与量测航迹建模为t-fot形式:
[0027]
x
t
=f(t;λ)+e
t
[0028]
式中,x
t
表示t时刻目标的状态,λ表示连续时间函数曲线系数,f(t;λ)表示量测航迹连续时间函数曲线,e
t
表示f(t;λ)与真实航迹连续时间函数曲线f(t)的误差;
[0029]
步骤2:航迹维持时间校对;
[0030]
对比量测航迹与真实航迹的起始时间和终止时间,将量测航迹与真实航迹时间序列中重合时域部分t
consistent
的航迹定义为一致维持航迹φ
consistent
,重合时域t
consistent
以外
的航迹定义为不一致偏差航迹φ
error
;
[0031]
步骤3:对于一致维持航迹φ
consistent
,计算量测航迹与真实航迹之间的一致维持航迹位置误差e:
[0032][0033]
步骤4:对于不一致偏差航迹φ
error
,定义平均航迹误差与不一致偏差航迹位置误差c分别为:
[0034][0035][0036]
步骤5:将一致维持航迹位置误差e与不一致偏差航迹位置误差c叠加,得到最终的连续时间航迹度量值:d=e+c,作为评估连续时间航迹跟踪算法性能的指标。
[0037]
如图2所示,实线为真实航迹,虚线为量测航迹,可观察到两航迹时域不重合。需要对斜线阴影部分(重合时域航迹)计算一致维持航迹位置误差e,对网格阴影部分(非重合时域航迹)计算得到不一致偏差航迹位置误差c,两误差值相加即可得到最终的连续时间航迹度量值d。
[0038]
具体实施例:
[0039]
1、设置仿真场景。
[0040]
参照图3,仿真场景设置为一维坐标系下,目标随时间发生位置移动,真实轨迹是以时间t为自变量的一维曲线。不同算法对真实轨迹进行估计,拟合出三条不同的量测航迹,本实施例主要是为了衡量真实航迹与量测航迹之间的距离误差,因此所有航迹曲线均为预设好的拟合函数以便说明本发明的核心步骤。真实航迹与三条量测航迹曲线函数如下所示:
[0041]
x
true
=0.2t2+0.3t+1,t∈(-1,4)
ꢀꢀ
(1)
[0042]
x1=0.2t2+0.1t+4,t∈(-1,4.5)
ꢀꢀ
(2)
[0043]
x2=0.3t2+0.1t,t∈(-2,3)
ꢀꢀ
(3)
[0044]
x3=0.3t2+2,t∈(-1.5,5)
ꢀꢀ
(4)
[0045]
其中,x
true
为真实航迹拟合函数,x1、x2、x3分别为量测航迹1、量测航迹2、量测航迹3的拟合函数。
[0046]
2、根据航迹时域一致的区间计算一致维持航迹φ
consistent
的位置误差。
[0047]
三条量测航迹起始时间和终止时间均不相同,需要找出与真实航迹时间对应的航迹区间,由于仿真场景以t为自变量,可通过简单的时间对比得到一致时间航迹区间。通过对一致航迹区间进行定积分,计算出量测航迹与真实航迹的一致航迹位置误差,其计算公式如下:
[0048][0049][0050]
[0051]
式中,t
consistent
表示量测航迹与真实航迹的重合时域。
[0052]
3、计算不一致偏差航迹φ
error
的位置误差。
[0053]
各量测轨迹的不一致时间航迹区间不同,本实施例通过对一致时间航迹区间位置误差进行关于时间的均值计算,所得结果作为各量测航迹的惩罚项叠加到距离误差中,能够做到合理且均匀,三条量测航迹的惩罚项分别为:
[0054][0055][0056][0057]
式中,t
errori
为各量测航迹与真实航迹时间不一致的航迹区间,为各量测航迹的平均航迹误差。
[0058]
惩罚叠加后各量测航迹误差值分别为:
[0059]
d1=e1+c1ꢀꢀ
(11)
[0060]
d2=e2+c2ꢀꢀ
(12)
[0061]
d3=e3+c3ꢀꢀ
(13)
[0062]
4、对比总位置误差值确定最佳量测航迹。
[0063]
量测航迹位置误差值越接近0,其与真实航迹的相似度越高。量测航迹1、2、3的距离误差值如图4所示,可明显看出量测航迹3的分数最接近于0,因此该量测航迹与真实航迹最为相似。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1