基于多传感器的无人机铁路巡检的定位方法及定位系统
本发明涉及无人机铁路巡检,具体地涉及一种基于多传感器的无人机铁路巡检的定位方法及定位系统。
背景技术:
1、铁路是我国国民经济的大动脉,铁路运输长期以来在我国运输中起着举足轻重的作用。因此铁路安全作为关系到国家和人民生命财产的大事,一直受到国家和铁道部的重视。
2、目前,受大风天气等的影响,铁路上以及铁路接触网上常会出现异物,铁路以及接触网上的异物会对铁路的正常安全运行以及供电造成影响,因此需要定时清理铁路异物,以保障铁路的安全运行以及正常供电。
3、传统的铁路异物巡检方法为人工巡检和巡检车巡检,费时费力且难度极大。无人机因其便利性,很快便被应用于铁路异物的检测工作中。现有的无人机的异物巡检方法没有考虑多传感器之间的相互影响关系,进而使得无人机对异物位置等信息的预测精度的低;且在恶劣环境中,其中一个或多个传感器的数据受到瞬时干扰的情况下,无法进行正常的巡检定位。
4、本技术发明人在实现本发明的过程中发现,现有技术的上述方案具有预测精度低且易受恶劣环境影响的缺陷。
技术实现思路
1、本发明实施例的目的是提供一种基于多传感器的无人机铁路巡检的定位方法及定位系统,该基于多传感器的无人机铁路巡检的定位方法及定位系统具体预测精度高且抗干扰能力强。
2、为了实现上述目的,本发明实施例提供一种基于多传感器的无人机铁路巡检的定位方法,包括:
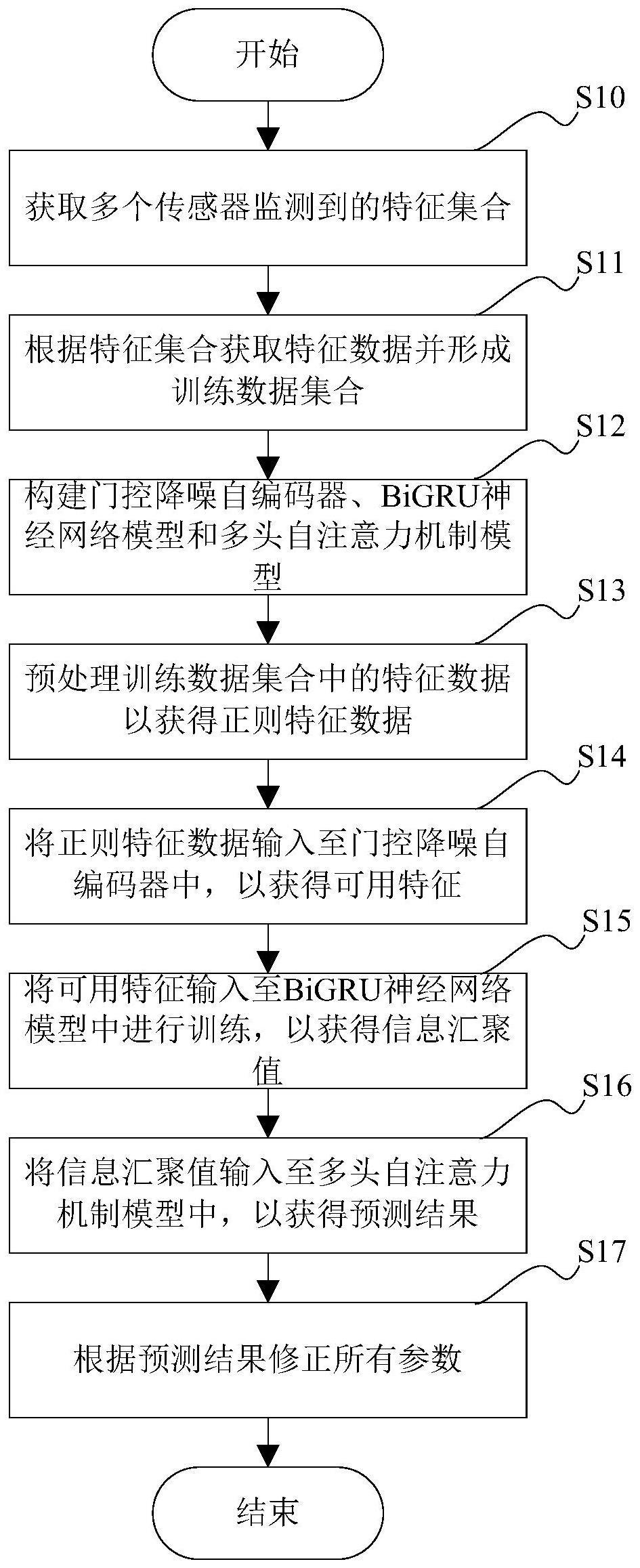
3、获取多个传感器监测到的特征集合;
4、根据所述特征集合获取特征数据并形成训练数据集合;
5、构建门控降噪自编码器、bigru神经网络模型和多头自注意力机制模型;
6、预处理所述训练数据集合中的特征数据以获得正则特征数据;
7、将所述正则特征数据输入至所述门控降噪自编码器中,以获得可用特征;
8、将所述可用特征输入至所述bigru神经网络模型中进行训练,以获得信息汇聚值;
9、将所述信息汇聚值输入至所述多头自注意力机制模型中,以获得预测结果;
10、根据所述预测结果修正所有参数。
11、可选地,预处理所述训练数据集合中的特征数据以获得正则特征数据包括:
12、根据公式(1)获取每个所述特征数据对应的标准特征数据,
13、
14、其中,为第i个所述标准特征数据,i为整数编号,i∈{1,2,…,i},i为所述训练数据集合中特征数据的数量,x为所述训练数据集合,x={x1,x2,…,xi},xi为所述训练数据集合中第i个特征数据,max()为取最大值操作,max()为取最小值操作;
15、根据公式(2)获取每个所述标准特征数据的正则特征数据,
16、
17、其中,为标准特征数据集合,xl为所述正则特征数据集合,s为所述传感器的序号,且s∈{1,2,…s},βs为第s个传感器的权重,λ为可调惩罚系数,φs为第s个传感器的学习参数,φ为s个传感器的学习参数的和,即φ=φ1+φ2+…+φs。
18、可选地,将所述正则特征数据输入至所述门控降噪自编码器中,以获得可用特征包括:
19、获得滑动窗口的大小;
20、根据所述滑动窗口的大小构造二维训练样本;
21、将所述二维训练样本添加高斯噪声以形成训练样本数据;
22、根据公式(3)计算所述训练样本数据中每个样本数据特征的隐藏特征值,
23、
24、其中,n为特征序号,n∈{1,2…,n},n为所述训练样本数据中样本数据特征的数量,σ为sigmoid激活函数,为第n个所述样本数据特征的编码误差系数,为第n个所述样本数据特征的编码偏置系数,t为时间步,t∈{1,2,…t},t为所述滑动窗口的最大值,为第t个时间步下第n个添加高斯噪声的样本数据特征,为第t个时间步下第n个样本数据特征的所述隐藏特征值;
25、根据公式(4)计算每个所述样本数据特征的重构数据特征,
26、
27、其中,为第t个时间步下第n个样本数据特征的所述重构数据特征,为第n个样本数据特征的解码误差系数,为样本数据特征的解码偏置系数。
28、可选地,将所述正则特征数据输入至所述门控降噪自编码器中,以获得可用特征还包括:
29、根据公式(5)计算损失函数,
30、
31、其中,lpre为损失函数值,ω为惩罚项,为所述重构数据特征的集合,为预测标签,y为真实标签;
32、根据所述损失函数修正对应的所述编码误差系数、所述编码偏置系数、所述解码误差系数以及所述解码偏置系数。
33、可选地,将所述正则特征数据输入至所述门控降噪自编码器中,以获得可用特征还包括:
34、根据公式(6)计算门控信息,
35、
36、其中,leakyrelu()为激活函数,gt为所述门控信息,wgt为预设门控权重,bgt为预设门控偏置;
37、根据公式(7)计算待过滤信息,
38、vt=tanh(wotgt+bot), (7)
39、其中,vt为所述待过滤信息,wot为预设过滤权重,bot为预设过滤偏置,tanh为激活函数;
40、根据公式(8)计算可用特征,
41、
42、其中,为所述可用特征。
43、可选地,将所述可用特征输入至所述bigru神经网络模型中进行训练,以获得信息汇聚值包括:
44、根据公式(9)计算更新门值,
45、
46、其中,为所述更新门值,为所述更新门值的输入变换矩阵,为所述更新门值的隐藏变换矩阵,为所述更新门值的偏置,a为bigru的前向或后向,取值1或-1,a=1时为前向,a=-1时为后向,在a=1时为上一时刻的隐藏特征值,在a=1时为下一时刻隐藏特征值;
47、根据公式(10)计算重置门值,
48、
49、其中,为所述重置门值,为所述重置门值的输入变换矩阵,为所述重置门值的隐藏变换矩阵,为所述重置门值的偏置;
50、根据公式(11)计算当前时刻的需过滤信息,
51、
52、其中,为所述需过滤信息,为所述需过滤信息的输入变换矩阵,为所述需过滤信息的隐藏变换矩阵,为所述需过滤信息的偏置;
53、根据公式(12)计算当前时刻的隐藏状态值,
54、
55、其中,为所述隐藏状态值;
56、根据公式(13)计算所有的所述传感器的信息汇聚值,
57、
58、其中,u为所述信息汇聚值,ht,n(1)为当前时刻第n个特征的前向的所述隐藏状态值,ht,n(-1)为当前时刻第n个特征的后向的所述隐藏状态值。
59、可选地,将所述信息汇聚值输入至所述多头自注意力机制模型中,以获得预测结果包括:
60、根据所述信息汇聚值获取q值、k值以及v值;
61、根据公式(14)计算注意力向量,
62、
63、其中,ωh为所述注意力向量,softmax()为softmax函数,为所述q值,为所述q值的变换矩阵,为所述k值,为所述k值的变换矩阵,dk为输入特征的维度,h为头的标号,h={1,2,…,h},h为头的数量;
64、根据公式(15)计算待输出向量,
65、
66、其中,tah为所述待输出向量,为所述v值,为所述v值的变换矩阵;
67、根据公式(16)计算输出向量,
68、ot=concat(ta1,ta2,…tah), (16)
69、其中,ot为所述输出向量,concat()为拼接操作;
70、根据公式(17)计算预测结果,
71、
72、其中,为所述预测结果,fully-connection()为全连接操作。
73、可选地,根据所述预测结果修正所有参数包括:
74、根据公式(18)修正所有参数,
75、
76、其中,loss-mse()为loss函数,为真实结果,γ为惩罚项,θ为模型参数。
77、可选地,所述定位方法还包括:
78、根据所述特征集合获取测试数据并形成测试数据集合;
79、根据公式(19)计算评价值,
80、
81、其中,rmse为评价值,ttesting为所述测试数据集合的测试值数量,j为整数编号,j∈{1,2,…,ttesting},yj为第j个测试值的真实值,为第j个测试值的预测值;
82、判断所述评价值是否大于或等于预设的评价阈值;
83、在所述评价值大于或等于所述评价阈值的情况下,判定模型为最优模型;
84、在所述评价值小于所述评价阈值的情况下,增加所述特征数据的训练样本。
85、另一方面,本发明还提供一种基于多传感器的无人机铁路巡检的定位系统,包括:
86、无人机本体;
87、多个传感器,设置在所述无人机本体上,用于监测铁路异物的多个特征值;
88、控制器,用于执行如上述任一所述的方法。
89、通过上述技术方案,本发明提供的基于多传感器的无人机铁路巡检的定位方法及定位系统通过对多个传感器监测到的特征集合进行处理,并获得正则特征数据,将该训练数据集合依次沿着门控降噪自编码器、bigru神经网络模型以及多头自注意力机制模型中进行训练,以获得预测结果,并根据预测结果不断优化模型。采用门控降噪自编码器、bigru神经网络模型和多头自注意力机制模型配合的方式,能够自适应地判别出蕴含更多重要信息的传感器,进而大幅提升预测精度,且能够在部分传感器故障时正常工作。
90、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!