一种旋转目标检测方法、装置、设备以及存储介质与流程
本技术涉及自动驾驶,尤其涉及一种旋转目标检测方法、装置、设备及存储介质。
背景技术:
1、感知检测技术是自动驾驶领域的关键技术,而对周围车辆和物体位置的环视感知是感知检测技术中较为重要的一部分。对物体的环视感知不仅需要将物体包围在检测框内,还需要根据物体的角度和方向调整检测框,使检测框充分贴合物体,这就要求检测框的各项参数需要有明确的定义,能够根据这些参数唯一确定一个检测框。而现有技术中,通常缺少对检测框的参数的明确限定,导致在确定检测框的角度时容易出现歧义,影响检测框的准确度。并且,在提取周围目标的特征时,通常将网络模型中骨干网络的不同层级之间的特征图,通过特征金字塔进行融合,计算量较大,不能满足自动驾驶的实时性要求。
技术实现思路
1、本技术实施例提供了一种旋转目标检测方法、装置、设备及存储介质,可以明确定义目标检测框的参数,避免目标检测框的角度出现歧义,保证目标检测框的准确性。
2、一方面,本技术实施例提供了一种旋转目标检测方法,该方法包括:
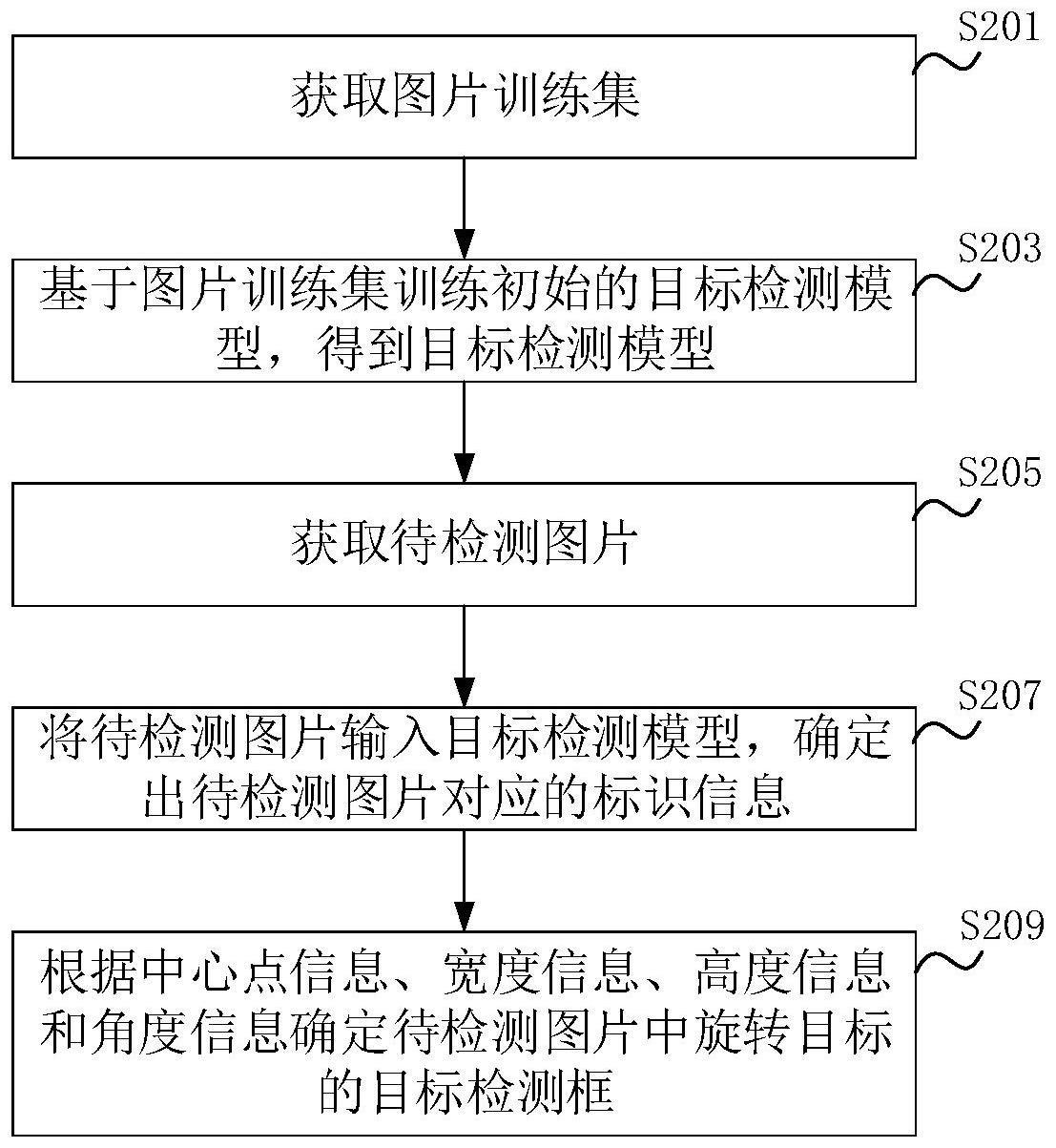
3、获取图片训练集;
4、基于图片训练集训练初始的目标检测模型,得到目标检测模型;
5、获取待检测图片;该待检测图片包括至少一个旋转目标;
6、将待检测图片输入目标检测模型,确定出待检测图片对应的标识信息;标识信息包括待检测图片中旋转目标对应的中心点信息、宽度信息、高度信息和角度信息;宽度信息大于等于高度信息;
7、根据中心点信息、宽度信息、高度信息和角度信息确定待检测图片中旋转目标的目标检测框。
8、进一步的,获取图片训练组,包括:
9、获取多张图片;
10、将多张图片分为多组图片训练组;其中,多组图片训练组中不同图片训练组中的图片尺寸不同,同一图片训练组中的图片尺寸相同;
11、基于多组图片训练组确定图片训练集。
12、进一步的,将多张图片分为多组图片训练组之前,还包括:
13、对多张图片进行色彩对比度增强,得到色彩对比度增强后的多张图片。
14、进一步的,基于所述图片训练集训练初始的目标检测模型,得到目标检测模型,包括:
15、确定图片训练集对应的历史标识信息;历史标识信息包括图片训练集的每张图片中旋转目标对应的历史中心点信息、历史宽度信息、历史高度信息和历史角度信息;
16、构建初始的目标检测模型,将初始的目标检测模型确定为当前目标检测模型;
17、基于当前目标检测模型,对图片训练集的标识信息进行预测,确定图片训练集对应的预测标识信息;预测标识信息包括图片训练集的每张图片中旋转目标对应的预测中心点信息、预测宽度信息、预测高度信息和预测角度信息;
18、基于图片训练集对应的预测标识信息和历史标识信息,确定损失值;
19、当损失值大于预设阈值时,基于损失值进行反向传播,对当前目标检测模型进行更新以得到更新后的当前目标检测模型,将更新后的当前目标检测模型重新确定为当前目标检测模型;重复步骤:基于当前目标检测模型,对多组图片训练组进行标识信息预测,确定图片训练集对应的预测标识信息;
20、当损失值小于或等于预设阈值时,将当前目标检测模型确定为目标检测模型。
21、进一步的,确定图片训练集对应的历史标识信息,包括:
22、提取图片训练集的每张图片中旋转目标对应的历史检测框;
23、将历史检测框的中心点对应的坐标确定为图片训练集的每张图片中旋转目标对应的历史中心点信息;
24、将历史检测框的长边的长度确定为图片训练集的每张图片中旋转目标对应的历史宽度信息;
25、将历史检测框的短边的长度确定为图片训练集的每张图片中旋转目标对应的历史高度信息;
26、将历史检测框的长边与坐标系横轴正方向的角度确定为图片训练集的每张图片中旋转目标对应的历史角度信息;
27、根据图片训练集的每张图片中旋转目标对应的历史中心点信息、历史宽度信息、历史高度信息和历史角度信息确定图片训练集对应的历史标识信息。
28、进一步的,历史标识信息还包括历史分类信息;
29、图片训练集的图片中存在的第一类旋转目标对应的历史检测框的长边与该第一类旋转目标的侧面底边平行;第一类旋转目标为历史分类信息为车辆且车辆的侧面面积大于等于正面面积或背面面积的旋转目标;
30、图片训练集的图片中存在的第二类旋转目标对应的历史检测框的长边与第二类旋转目标的正面或背面底边平行;第二类旋转目标为历史分类信息为车辆且车辆的侧面面积小于正面面积或背面面积的旋转目标。
31、另一方面,本技术实施例提供了一种旋转目标检测装置,该装置包括:
32、图片训练集获取模块,用于获取图片训练集;
33、模型训练模块,用于基于图片训练集训练初始的目标检测模型,得到目标检测模型;
34、待检测图片获取模块,用于获取待检测图片;待检测图片包括至少一个旋转目标;
35、标识信息获取模块,用于将待检测图片输入目标检测模型,确定出待检测图片对应的标识信息;标识信息包括待检测图片中旋转目标对应的中心点信息、宽度信息、高度信息和角度信息;宽度信息大于等于高度信息;
36、目标检测框确定模块,用于根据中心点信息、宽度信息、高度信息和角度信息确定待检测图片中旋转目标的目标检测框。
37、进一步的,该装置还包括:
38、图片训练集获取模块,还用于获取多张图片;将多张图片分为多组图片训练组;其中,多组图片训练组中不同图片训练组中的图片尺寸不同,同一图片训练组中的图片尺寸相同;基于多组图片训练组确定图片训练集。
39、进一步的,该装置还包括:
40、图片训练集获取模块,还用于对多张图片进行色彩对比度增强,得到色彩对比度增强后的多张图片。
41、进一步的,该装置还包括:
42、模型训练模块,还用于确定图片训练集对应的历史标识信息;历史标识信息包括图片训练集的每张图片中旋转目标对应的历史中心点信息、历史宽度信息、历史高度信息和历史角度信息;
43、构建初始的目标检测模型,将初始的目标检测模型确定为当前目标检测模型;
44、基于当前目标检测模型,对图片训练集的标识信息进行预测,确定图片训练集对应的预测标识信息;预测标识信息包括图片训练集的每张图片中旋转目标对应的预测中心点信息、预测宽度信息、预测高度信息和预测角度信息;
45、基于图片训练集对应的预测标识信息和历史标识信息,确定损失值;
46、当损失值大于预设阈值时,基于损失值进行反向传播,对当前目标检测模型进行更新以得到更新后的当前目标检测模型,将更新后的当前目标检测模型重新确定为当前目标检测模型;重复步骤:基于当前目标检测模型,对多组图片训练组进行标识信息预测,确定图片训练集对应的预测标识信息;
47、当损失值小于或等于预设阈值时,将当前目标检测模型确定为目标检测模型。
48、进一步的,该装置还包括:
49、模型训练模块,还用于提取图片训练集的每张图片中旋转目标对应的历史检测框;
50、将历史检测框的中心点对应的坐标确定为图片训练集的每张图片中旋转目标对应的历史中心点信息;
51、将历史检测框的长边的长度确定为图片训练集的每张图片中旋转目标对应的历史宽度信息;
52、将历史检测框的短边的长度确定为图片训练集的每张图片中旋转目标对应的历史高度信息;
53、将历史检测框的长边与坐标系横轴正方向的角度确定为图片训练集的每张图片中旋转目标对应的历史角度信息;
54、根据图片训练集的每张图片中旋转目标对应的历史中心点信息、历史宽度信息、历史高度信息和历史角度信息确定图片训练集对应的历史标识信息。
55、进一步的,该装置还包括:
56、模型训练模块,还用于图片训练集的图片中存在的第一类旋转目标对应的历史检测框的长边与该第一类旋转目标的侧面底边平行;第一类旋转目标为历史分类信息为车辆且车辆的侧面面积大于等于正面面积或背面面积的旋转目标;
57、图片训练集的图片中存在的第二类旋转目标对应的历史检测框的长边与第二类旋转目标的正面或背面底边平行;第二类旋转目标为历史分类信息为车辆且车辆的侧面面积小于正面面积或背面面积的旋转目标。
58、另一方面,本技术实施例提供了一种电子设备,电子设备包括处理器和存储器,存储器中存储有至少一条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载并执行如上所述的旋转目标检测方法。
59、另一方面,本技术实施例提供了一种计算机存储介质,计算机存储介质中存储有至少一条指令或至少一段程序,至少一条指令或至少一段程序由处理器加载并执行以实现如上所述的旋转目标检测方法。
60、本技术实施例提供的旋转目标检测方法、装置、设备及存储介质,具有如下技术效果:
61、获取图片训练集,基于图片训练集训练初始的目标检测模型,得到目标检测模型,获取待检测图片,待检测图片包括至少一个旋转目标,将待检测图片输入目标检测模型,确定出待检测图片对应的标识信息,标识信息包括待检测图片中旋转目标对应的中心点信息、宽度信息、高度信息和角度信息;宽度信息大于等于高度信息,根据中心点信息、宽度信息、高度信息和角度信息确定待检测图片中旋转目标的目标检测框,如此,可以明确定义目标检测框的参数,避免目标检测框的角度出现歧义,保证目标检测框的准确性。
- 还没有人留言评论。精彩留言会获得点赞!