基于面型参数生成颞下颌关节髁突运动包络面及其截面曲线的方法和装置
1.本技术属于数字化医学领域,特别涉及一种基于面型参数生成颞下颌关节髁突运动包络面及其截面曲线的方法和装置。
背景技术:
2.颞下颌关节是颅颌面唯一可活动的关节,也是人体最复杂的关节之一。图1示出颞下颌关节的结构示意图,如图1所示,颞下颌关节主要包括关节盘001、关节突002和关节窝003。所述颞下颌关节既可进行滑动运动,也可进行转动运动,从而实现重要的生理功能,主要包括开闭口、吞咽、咀嚼、语言等。对于因肿瘤、创伤、感染、关节强直等疾病造成的颞下颌关节缺损,而不能正常行使功能者,人工颞下颌全关节假体置换术是近年来发展迅速的治疗手段之一。
3.目前,人工颞下颌关节假体一般参照髋关节等四肢大关节进行设计,以球窝关系或近似球窝关系的设计为主,目的是增加关节窝假体对关节突假体的形态约束,防止因关节周围组织的缺失而导致的脱位。但是在生理状态下,颞下颌关节的关节突远小于关节窝,借助周围组织如关节盘、关节囊、肌肉等实现比四肢大关节更为灵活的运动,因而参照大关节设计的人工颞下颌关节,在植入相应位置后,颞下颌关节的运动情况与健康关节相差较大,现有临床病例长期随访结果显示患者术后开口度常无法达到正常值,也无法良好实现侧方运动及前伸运动。
4.现有技术除参照大关节设计的球窝关节外,也有参照正常颞下颌关节骨性结构设计的全关节假体。但是与天然关节相比,全关节假体无法模拟关节盘功能,因此仅参照骨性结构设计的人工关节假体仍然无法充分恢复关节运动功能,因而难以获得满意的临床效果。随访结果显示术后患者在开口度、前伸、侧方运动等方面仍与生理状态存在较大差别。
5.进一步地,对于单侧全关节置换者,由于双侧关节运动不一致,导致关节假体对侧的天然关节受力较大、运动范围改变较大,因而导致对侧天然关节发生潜在病损。
6.颞下颌关节髁突运动包络面是髁突自然运动可达的边界范围,颞下颌关节髁突运动包络面的形态能够引导人工关节突沿关节窝功能面运动,从而实现下颌骨的生理运动方式。
7.然而,需要全关节置换者多因肿瘤、创伤、感染、关节强直等疾病无法实现下颌骨的运动,无法直接获得其颞下颌关节髁突运动包络面数据。因此,亟需获得一种生成颞下颌关节髁突运动包络面的方法。
技术实现要素:
8.为解决现有技术所存在的技术问题,本技术人经过锐意研究,通过测量颞下颌关节健康人的部分面型参数,并基于所述面型参数生成矩阵,再利用所述矩阵以及目标面型参数生成目标髁突运动包络面特定截面的截面曲线。进一步地,基于多条所述截面曲线可
生成目标髁突运动包络面。
9.本技术的目的在于提供以下几个方面:
10.第一方面,本技术提供一种基于面型参数生成颞下颌关节髁突运动包络面方法,所述方法包括:
11.获取多条颞下颌关节髁突运动包络面截面曲线方程;
12.根据多条所述颞下颌关节髁突运动包络面截面曲线方程生成多条颞下颌关节髁突运动包络面曲线;
13.根据所述多条颞下颌关节髁突运动包络面曲线生成颞下颌关节髁突运动包络面。
14.在一种可实现的方式中,所述获取多条颞下颌关节髁突运动包络面截面曲线方程具体包括:
15.获取目标颅面特征以及目标面型参数;
16.结合所述目标颅面特征获取基准面型参数以及基准截面拟合曲线方程;
17.根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵;
18.根据所述矩阵以及所述目标面型参数生成目标截面曲线方程。
19.在一种可实现的方式中,所述获取目标颅面特征包括:
20.获取目标颅面三维数字模型;
21.基于所述目标颅面三维数字模型提取目标颅面特征。
22.在一种可实现的方式中,所述获取目标面型参数包括:
23.获取目标颅面三维数字模型;
24.测量所述目标颅面三维数字模型获取目标面型参数,所述目标面型参数包括sna、snb、下颌角间距、下颌体长、下颌平面角度、n-me连线与fh平面之间的角度。
25.在一种可实现的方式中,所述获取基准面型参数包括:
26.获取基准颅面三维数字化模型;
27.测量所述基准颅面三维数字化模型获取基准面型参数,所述基准面型参数与所述基准面型参数的类型对应相同。
28.可选地,获取基准颅面三维数字化模型包括:
29.获取多个候选颅面模型;
30.基于所述多个候选颅面模型根据预设规则生成基准颅面三维数字模型。
31.在一种可实现的方式中,所述获取基准截面拟合曲线方程包括:
32.获取基准包络面模型;
33.利用基准截面对所述基准包络面模型进行截取,形成包络面基准截面实际曲线;
34.获取所述包络面基准截面实际曲线上多个特征点的坐标;
35.根据多个所述特征点的坐标生成基准截面拟合曲线方程。
36.在一种可实现的方式中,根据所述矩阵以及所述目标面型参数生成目标截面曲线包括:
37.利用所述目标面型参数以及所述矩阵进行逆运算生成目标截面曲线方程;
38.根据所述目标截面曲线方程绘制目标截面曲线。
39.第二方面,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面装置,所述装置包括:
40.截面曲线生成单元,用于生成多条颞下颌关节髁突运动包络面截面曲线方程;
41.曲面方程生成单元,用于根据多条所述颞下颌关节髁突运动包络面截面曲线方程生成多条颞下颌关节髁突运动包络面曲线;
42.曲面生成单元,用于根据所述多条颞下颌关节髁突运动包络面曲线生成颞下颌关节髁突运动包络面。
43.第三方面,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面的程序,所用程序用于执行时实现上述第一方面所述生成颞下颌关节髁突运动包络面方法的步骤。
44.第四方面,一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现上述第一方面所述生成颞下颌关节髁突运动包络面方法的步骤。
45.第五方面,一种检测设备,所述检测设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行上述第一方面所述生成颞下颌关节髁突运动包络面方法。
46.第六方面,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法,所述方法包括:
47.获取目标颅面特征以及目标面型参数;
48.结合所述目标颅面特征获取基准面型参数以及基准截面拟合曲线方程;
49.根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵;
50.根据所述矩阵以及所述目标面型参数生成目标截面曲线。
51.在一种可实现的方式中,所述获取目标颅面特征包括:
52.获取目标颅面三维数字模型;
53.基于所述目标颅面三维数字模型提取目标颅面特征。
54.在一种可实现的方式中,所述获取目标面型参数包括:
55.获取目标颅面三维数字模型;
56.测量所述目标颅面三维数字模型获取目标面型参数,所述目标面型参数包括sna、snb、下颌角间距、下颌体长、下颌平面角度、n-me连线与fh平面之间的角度。
57.在一种可实现的方式中,所述获取基准面型参数包括:
58.获取基准颅面三维数字化模型;
59.测量所述基准颅面三维数字化模型获取基准面型参数,所述基准面型参数与所述基准面型参数的类型对应相同。
60.可选地,获取基准颅面三维数字化模型包括:
61.获取多个候选颅面模型;
62.基于所述多个候选颅面模型根据预设规则生成基准颅面三维数字模型。
63.在一种可实现的方式中,所述获取基准截面拟合曲线方程包括:
64.获取基准包络面模型;
65.利用基准截面对所述基准包络面模型进行截取,形成包络面基准截面实际曲线;
66.获取所述包络面基准截面实际曲线上多个特征点的坐标;
67.根据多个所述特征点的坐标生成基准截面拟合曲线方程。
68.在一种可实现的方式中,根据所述矩阵以及所述目标面型参数生成目标截面曲线包括:
69.利用所述目标面型参数以及所述矩阵进行逆运算生成目标截面曲线方程;
70.根据所述目标截面曲线方程绘制目标截面曲线。
71.第七方面,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线装置,所述装置包括:
72.参数获取单元,用于获取目标颅面特征以及目标面型参数;
73.曲线方程拟合单元,用于结合所述目标颅面特征获取基准面型参数以及基准截面拟合曲线方程;
74.矩阵生成单元,用于根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵;
75.所述曲线拟合单元还用于,根据所述矩阵以及所述目标面型参数生成目标截面曲线。
76.第八方面,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线的程序,所用程序用于执行时实现上述第六方面所述基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法的步骤。
77.第九方面,一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现上述第六方面所述基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法的步骤。
78.第十方面,一种检测设备,所述检测设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行上述第六方面所述基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法。
79.与现有技术相比,本技术提供的方法根据线性变换的矩阵表示理论,首先生成以矩阵形式表示的头颅模型中可测的面型参数与颞下颌关节髁突运动包络面截面曲线系数的映射关系,再基于在目标头颅模型中可测的面型参数利用所述矩阵进行逆运算生成颞下颌关节髁突运动包络面截面曲线,从而实现仅利用静态参数即可生成较为准确的运动包络面截面曲线,基于此,能够较为准确地生成由于种种原因而无法采集的健康状态下髁突运动包络面各参数。
80.进一步地,本技术提供的方法,物理参数的采集方法简便易行,所有参数均为无创采集,并且,各参数的采集可借助常规检查结果,而无需进行特别的参数采集,并且,方案整体计算量较小,能够实现目标包络面截面曲线以及包络面的快速确定。
附图说明
81.图1示出颞下颌关节的结构示意图;
82.图2-1示出一种健康颞下颌关节髁突运动包络面的立体结构示意图;
83.图2-2示出图2-1所示关节突运动包络面的立体结构网格图;
84.图3示出本技术提供的基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法的流程图;
85.图4-1示出图2-1所示包络面的矢状截面主视图;
86.图4-2示出图4-1所示结构的立体结构示意图;
87.图5示出根据图4-1以及图4-2所示截面曲线进行拟合所得拟合曲线。
88.附图标记说明
89.001-关节盘,002-关节突,003-关节窝。
具体实施方式
90.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致方法的例子。
91.下面通过具体的实施例对本技术提供的基于面型参数生成颞下颌关节髁突运动包络面及截面曲线的方法及装置进行详细阐述。
92.首先,对本方案的使用场景作简要介绍。
93.如图1所示,对于健康人而言,颞下颌关节主要包括关节盘001、关节突002和关节窝003,其中,所述关节突002在所述关节盘001的牵引和限制下,可在所述关节窝003中滑动或者转动,从而实现下颌的各种生理功能,例如,闭口、吞咽、咀嚼或者语言等。
94.在本技术中,术语“颞下颌关节髁突”与术语“关节突”指代相同,即,二者表示相同的生理位置及结构。
95.图2-1示出一种健康颞下颌关节髁突运动包络面的立体结构示意图,图2-2示出图2-1所示关节突运动包络面的立体结构网格图,如图2-1和图2-2所示,健康关节突在关节窝中的运动轨迹难以用简单的数学表达式表达。
96.在本技术中,所述颞下颌关节髁突运动包络面(为方便表述,下文简称为“包络面”)是指颞下颌关节做各种运动过程中,所述颞下颌关节突的运动边界。实际上,在最大开口时,关节突的部分结构超出对应的关节窝。
97.由图2-1以及图2-2可见,所述包络面为一个不规则并且不平整的面,并且,从立体角度看,所述包络面形成一个不规则的窝状结构,但是,该窝状结构与骨性关节窝的结构并不相同。
98.可以理解的是,对于需要进行颞下颌全关节置换的患者,在去除病患后健康状态下的包络面难以预先确定。由于所述包络面的形态是设计人工颞下颌关节假体的关键参数,因此,预先确定较为准确的包络面形态在实践中尤为重要。
99.基于此,本技术提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线的方法,具体地,首先对基准头颅颞下颌关节髁突运动包络面在特定截面上的截面曲线进行数学表达,再以矩阵的方法生成面型参数-包络面矢状截面的矩阵,再根据目标头颅的对应面型参数利用所述矩阵计算所述目标头颅颞下颌关节髁突运动包络面在相应截面上的截面曲线的数学表达式。
100.进一步地,基于所述颞下颌关节髁突运动包络面截面曲线可生成相应包络面的表达式,并绘制出相应形态。
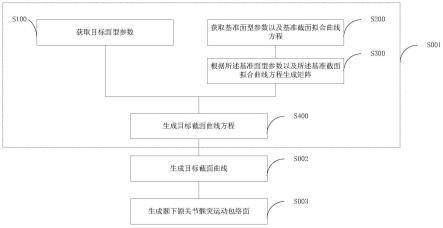
101.具体地,图3示出本技术提供的基于面型参数生成颞下颌关节髁突运动包络面方
法的流程图,如图3所示,所述方法包括以下步骤s001至步骤s003:
102.s001,获取多条颞下颌关节髁突运动包络面截面曲线方程;
103.s002,根据多条所述颞下颌关节髁突运动包络面截面曲线方程生成颞下颌关节髁突运动包络面曲线;
104.s003,根据所述颞下颌关节髁突运动包络面曲线生成颞下颌关节髁突运动包络面。
105.在本实例中,步骤s001具体可以包括以下步骤s100至步骤s400:
106.s100,获取目标颅面特征以及目标面型参数。
107.在本实例中,所述获取目标颅面特征具体可以包括以下步骤s111和步骤s112:
108.步骤s111,获取目标颅面三维数字模型。
109.在本实例中,所述目标颅面三维数字模型可以是根据目标头颅的二维数字信息利用计算机辅助的手段重建而得的。
110.步骤s112,基于所述目标颅面三维数字模型提取目标颅面特征。
111.在本实例中,所述目标颅面特征是指提取自目标头颅三维数字化模型的颅面特征,该颅面特征可以被认为是目标对象的颅面特征。
112.进一步地,所述颅面特征可以根据具体需要而具体设定,例如,颅面特征可以包括面型长短、宽窄以及上下颌的前后位置关系等,其中,用于判定面型长短、宽窄、上下颌的前后位置关系等特征的具体参数可以根据需要而具体设定。
113.更进一步地,前述各颅面特征还可以进一步拆解为多个子特征。
114.可以理解的是,根据具体的需求,所述颅面特征还可以包括其它参数。
115.在本实例中,所述目标面型参数是指提取自目标三维数字化模型的面型参数。
116.在本实例中,所述面型参数不同于所述颅面特征,其中,所述颅面特征为定性划分颅面类型的依据,而所述面型参数提取于颅面三维数字模型,能够反映被采集对象面型特征的定量数据。
117.在本实例中,所述获取目标面型参数具体可以包括以下步骤s121和步骤s122:
118.步骤s121,获取目标颅面三维数字模型。
119.在本实例中,本步骤可以直接调用步骤s111生成的目标颅面三维数字模型,以避免重复性计算。
120.步骤s122,基于所述目标颅面三维数字模型测量目标面型参数,所述目标面型参数包括颞下颌关节的相应参数和肌肉相关的参数等,例如,sna、snb、下颌角间距、下颌体长、下颌平面角度、n-me连线与fh平面之间的角度。
121.可以理解的是,目标面型参数还可以包括其它能够进行包络面形态预测的其他参数。
122.在本实例中,测量目标面型参数可以使用现有技术中任意一种可基于三维数字化模型测量数据的方法,例如,可以使用proplan cmf软件对目标颅三维数字模型进行头影测量,从而获得目标面型参数。
123.s200,获取基准面型参数以及基准截面拟合曲线方程。
124.在本技术中,所述基准面型参数为基于基准颅面三维数字化模型而获取的面型参数,其中,所述基准头颅三维数字化模型为基于健康人群的头颅三维数字化模型获取。
125.在本技术中,为方便表述,将健康人群的头颅三维数字化模型简称为备选头颅三维数字化模型,所述备选头颅三维数字化模型可以被存储于备选模型库中,所述备选模型库包括有效数量的备选头颅三维数字化模型,例如,每种面型的备选头颅三维数字化模型至少有一种。
126.可选地,备选头颅三维数字化模型的重建方式与目标头颅三维数字化模型的重建方式相同,既简化处理操作方式,也使得二者的数据具有可对比性。
127.在本实例中,所述备选头颅三维数字化模型可以直接选自健康人群的头颅三维数字化模型,还可以在所述健康人群的头颅三维数字化模型的基础上,进一步根据上下颌数字化实体模型进行校正而得的三维数字化模型,所述上下颌数字化实体模型包括石膏模型扫描模型,或者,口扫采集对象口腔所得数字化模型。
128.具体地,根据上下颌数字化实体模型对备选头颅三维数字化模型进行校正具体包括以下步骤s201至步骤s202:
129.步骤s201,获取标准上下颌牙列三维模型和下颌运动轨迹。
130.在一种可实现的方式中,可使用石膏模型获取标准上下颌牙列三维模型,具体可以包括以下步骤:
131.制作采集对象的可拆分的上下颌实体模型,其中,所述上下颌实体模型可拆分为相互独立的上颌实体模型以及下颌实体模型;
132.使用扫描仪对所述上下颌实体模型进行扫描,得到标准上下颌牙列三维模型。
133.其中,对使用扫描仪对所述上下颌模型进行扫描具体包括:
134.将咬合状态的上下颌实体模型进行扫描,得到咬合上下颌三维模型;
135.将上颌模型与下颌模型分别进行扫描,分别得到上颌三维模型和下颌三维模型;
136.根据所述咬合上下颌三维模型的咬合关系,将上颌三维模型与下颌三维模型进行咬合模拟,得到标准上下颌三维模型。
137.在另一种可实现的方式中,可使用口扫采集对象口腔获取标准上下颌牙列三维模型,具体可以包括以下步骤:
138.使用口腔扫描仪对采集对象的口腔内部进行扫描,得到标准上下颌牙列三维模型。
139.在本实例中,获取下颌运动轨迹的方法可以采用现有技术中任意一种采集下颌运动轨迹的方法,例如,获取下颌运动轨迹可以具体包括以下步骤:
140.制作采集对象的上牙列颌垫以及下牙列颌垫,在所述上牙列颌垫的前牙列处设置有上靶标,在所述下牙列颌垫的前牙列处设置有下靶标;
141.令采集对象佩戴所述上牙列颌垫和所述下牙列颌垫,利用下颌运动轨迹扫描仪跟踪所述上靶标和下靶标,获得下颌运动轨迹。
142.步骤s202,以切牙近中切角、左右第一磨牙近中牙尖作为基准点,将所述标准上下颌牙列三维模型与所述备选颅面三维数字化模型进行匹配,得到校正颅面三维数字模型。
143.在本实例中,如果对备选颅面三维数字模型进行校正获得校正颅面三维数字模型,则在备选模型库中,使用校正颅面三维数字模型替换对应备选颅面三维数字模型,从而更新备选模型库中的信息。
144.在本实例中,执行本步骤的软件可以使用现有技术中任意一种可执行上述操作的
软件,例如,geomagic studio软件。
145.在本实例中,所述获取基准面型参数可以具体包括以下步骤s211至步骤s212:
146.步骤s211,获取基准颅面三维数字化模型。
147.在本实例中,所述基准颅三维数字化模型可以由至少以下两种方案获取:
148.第一种方案为:由多个候选颅面三维数字化模型中直接选取所述基准颅面三维数字化模型;
149.第二种方案为:由多个候选颅面三维数字化模型进行融合,生成所述基准颅面三维数字化模型。
150.在第一种方案中,本步骤s211可以具体包括以下步骤s2111和步骤s2112:
151.步骤s2111,获取多个候选颅面模型。
152.在本方案中,所述候选颅面模型选自备选颅面模型,所述候选颅面模型与目标颅面模型满足第一筛选规则,从而实现对备选颅面模型进行初步筛选。
153.在本方案中,所述第一筛选规则可根据具体需要而具体制定。例如,根据面型的长短、宽窄、上下颌的前后位置关系等特征将备选颅面模型划分为8类,第一筛选规则为:与目标头颅面型特征相同的一类备选颅面模型。
154.可以理解的是,第一筛选规则还可以为根据具体需求能够从备选颅面模型中筛选出相应候选颅面模型的其它规则,使得候选颅面模型与目标颅面模型的相似度更高。
155.步骤s2112,基于所述候选颅面模型根据第一转换规则生成基准颅三维数字模型。
156.在本方案中,所述第一转换规则为从所述候选颅面模型中选择一个与目标颅面模型相似度最高的候选颅模型作为基准颅面三维数字模型,而不对候选颅面模型做任何数据处理。
157.在本方案中,所述第一转换规则为与所述目标颅面三维数字模型相似度最高的候选颅面模型。
158.进一步地,本方案对计算所述目标颅面三维数字模型与候选颅模型相似度的方法不做任何限定,可以使用现有技术中任意一种可用于计算两个三维数字模型相似度的方法,例如,中国专利申请cn109767841a公开的颅面三维形态数据库相似模型的检索方法。
159.在本实例中,用于计算两个三维数字模型相似度的采样点可以根据具体需要而具体设定。
160.在第二种方案中,本步骤s211可以具体包括以下步骤s2113和步骤s2114:
161.步骤s2113,获取多个候选颅面模型。
162.在本方案中,所述候选颅面模型选自备选颅面模型,所述候选颅面模型与目标颅面模型满足第二筛选规则,从而实现对备选颅面模型进行初步筛选。
163.在本实例中,所述第二筛选规则可以与所述第一筛选规则相同,也可以与所述第一筛选规则不同,以满足在第二种方案中筛选出能够更准确融合成基准颅面三维数字模型的候选颅面模型。
164.在一种可实现的方式中,所述第二筛选规则可以为相应参数满足预设条件,其中,所述相应参数包括于表示面型的线距以及角度,所述预设条件为相同,或者符合预设阈值范围。
165.步骤s2114,基于所述候选颅面模型根据第二转换规则生成基准颅面三维数字模
型。
166.在本方案中,所述第二转换规则可以包括以下步骤:
167.分别将每个所述候选颅面模型与所述目标颅面三维数字模型进行比对;
168.将各候选颅面模型中与目标颅面模型相似度最大的区域进行截取,获得多个待融合模块;
169.将各待融合模块进行融合生成基准颅面三维数字模型。
170.在本方案中,各待融合模块相互融合成能够获得一个完成的颅面三维数字模型。
171.步骤s212,测量所述基准颅面三维数字化模型获取基准面型参数,所述基准面型参数与所述目标面型参数对应相同。
172.在本实例中,对所述基准颅面三维数字化模型进行测量从而获取基准面型参数,优选地,测量基准颅面三维数字化模型所用的方法与测量所述目标颅面三维数字化模型所用的方法相同,例如,在本实例中,均使用proplan cmf软件进行头影测量。
173.进一步地,二者的采样点也对应相同,使得采集所得初始数据具有可比性,例如,在本实例中,可以为传统头影测量参数和颞下颌关节参数等。
174.在本实例中,所述基准截面拟合曲线方程具体可以包括以下步骤s221至步骤s224:
175.步骤s221,获取基准包络面模型。
176.在本实例中,所述基准包络面模型为基准颅面三维数字化模型中颞下颌关节髁突运动形成的包络面。
177.在本实例中,所述基准包络面模型可根据所述基准颅面三维数字化模型以及下颌运动轨迹计算而得,具体地,可以包括以下步骤s2211至步骤s2212:
178.步骤s2211,将所述下颌运动轨迹与对应的备选颅面三维数字模型进行匹配。
179.在本实例中,所述匹配是指将下颌运动的数据通过所述标准上下颌牙列三维模型与目标头颅三维数字化模型进行匹配,将下颌运动轨迹与所述目标头颅三维数字化模型统一坐标系的过程。
180.本技术对执行本步骤所使用的软件不做特别限定,可以使用现有技术中任意一种可执行上述步骤的软件,例如,geomagic studio软件。
181.步骤s2212,根据所述下颌运动轨迹以及预设于所述备选颅面三维数字模型上的髁突运动功能面,计算生成基准包络面模型。
182.在本实例中,所述髁突运动功能面配准之后,通过计算机仿真获得下颌骨髁突运动包络面,具体地,可使下颌骨按预设顺序运动,并将下颌骨运动轨迹在每个时刻的位置均进行保存,将所述位置进行叠加,所得结果即为髁突运动包络面。
183.在本实例中,本步骤的具体实现方式可以采用现有技术中任意一种可实现本步骤的方式。
184.步骤s222,利用基准截面对所述基准包络面模型进行截取,形成包络面基准截面实际曲线。
185.在本实例中,可以采用现有技术中任意一种可对三维数字模型进行平面截取的方法,例如,可以使用geomagic软件实现上述方案。
186.为便于说明,在本实例中,基准截面以矢状面为例进行说明。
187.本技术人发现,使用矢状面作为基准截面对于目标包络面截面曲线以及目标包络面模型的完成有重要作用,同时,也为目标关节窝功能面的确立提供重要参考。
188.可以理解的是,在本方案中,还可以使用其它截面对所述基准包络面模型进行截取,其它截面不仅可以为冠状截面,还可以为其它角度的平面。
189.具体地,将步骤s221获得的基准包络面模型导入到geomagic软件,并在该软件内调整所述基准包络面的方向,再使用水平面截面功能对所述基准包络面进行矢状向截面,进一步地,基于所述矢状向截面提取所述基准包络面模型在所述矢状向截面上的截面曲线,并将所述截面曲线保存为obj.格式。
190.图4-1示出图2-1所示包络面的矢状截面主视图,图4-2示出图4-1所示结构的立体结构示意图,如图4-1和图4-2所示,在本实例中,本步骤所得截面曲线近似为双峰曲线。
191.步骤s223,获取所述包络面基准截面实际曲线上多个特征点的坐标。
192.在本实例中,将步骤s222提取所得截面曲线以txt.格式打开,并在所述截面曲线上提取多个特征点的坐标。
193.具体地,在本实例中,可将特征点坐标导入matlab软件,并将所述特征点的空间坐标转换为二维平面点坐标,再以眶耳平面为基准水平面对所述截面曲线进行顺时针或逆时针旋转,获得眶耳平面与x轴平行时的xy平面内的所述截面曲线点坐标。后续步骤所使用的坐标为所述截面曲线点坐标。
194.在处理后的截面曲线上选取特征性点坐标,在本实例中,所述特征点的数量和选取五分类可根据所述截面曲线的具体形态而具体设定。
195.例如,如图4-2所示的截面曲线,则至少提取以下10个特征点:特征点(1)为左起第一个凸起的最高点,并将该点确定为拟新建二维坐标系的原点,特征点(2)为两峰凹陷处的最低点,特征点(3)为左起第二个凸起的最高点,特征点(4)为所述拟新建二维坐标系在x=-2附近的点,特征点(5)和特征点(6)为所述截面曲线在特征点(1)和特征点(2)之间的两个点,特征点(7)和特征点(8)为所述截面曲线在特征点(2)和特征点(3)之间的两个点,特征点(9)和特征点(10)为所述截面曲线在所述拟新建二维坐标系在特征点(3)的x正方向上的两个点。
196.步骤s224,根据多个所述特征点的坐标生成基准截面拟合曲线方程。
197.图5示出根据图4-1以及图4-2所示截面曲线进行拟合所得拟合曲线,在本实例中,使用matlab将步骤s223获得的特征点坐标进行拟合,如图5所示,生成基准截面拟合曲线以及所述基准截面拟合曲线方程。
198.在本实例中,本步骤可以使用傅立叶转换来生成基准截面拟合曲线。
199.在本实例中,可将所述基准截面拟合曲线预存于数据库中,在后续使用过程中,可根据目标头颅的类型直接调取与目标头颅模型类型对应的基准截面拟合曲线。
200.相应地,在本实例中,所述矩阵也可以预存于所述数据存中,在后续使用过程中,可根据目标头颅的类型直接调取与目标头颅模型类型对应的矩阵。
201.可以理解的是,预存于数据库中的基准截面拟合曲线以及矩阵均可根据需要而随时更新。
202.s300,根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵。
203.在本实例中,本步骤的具体实现方式可以采用现有技术中任意一种根据参数与对
应的拟合曲线生成相应矩阵的方法。
204.例如,提取所述基准截面拟合曲线方程中的参数,并将基准面型参数以及所述基准截面拟合曲线方程的参数输入matlab中,进而计算得到二者的矩阵。
205.s400,根据所述矩阵以及所述目标面型参数生成目标截面曲线。
206.在本实例中,本步骤具体可以包括以下步骤s401和步骤s402:
207.步骤s401,利用所述目标面型参数以及所述矩阵进行逆运算生成目标截面曲线方程。
208.在本实例中,本步骤的具体实现方式可以为步骤s300的逆运算。
209.例如,将该目标面型参数输入到matlab中,使用所述矩阵计算生成目标截面曲线方程的参数,再利用所述参数生成目标截面曲线方程。
210.步骤s402,根据所述目标截面曲线方程绘制目标截面曲线。
211.在本实例中,利用数据处理软件根据所述参数生成目标截面曲线方程生成目标截面曲线,即,预测出目标截面曲线。
212.本技术提供的方法将包络面三维形态简化表达为包络面的矢状截面曲线的二维形态,该曲线具有规律,实现其数学表达及预测具有极高的应用价值,可实现对个体的包络面形态预测。
213.在本技术中,步骤s002的具体实现方式不做特别限制,可以采用现有技术中任意一种根据多条曲线生成包括所述多条曲线的曲面的方法。
214.在本技术中,步骤s003的具体实现方式不做特别限制,可使用现有技术任意一种可根据曲面方程生成相应曲面的方法。可以理解的是,可以借助现有技术中任意一种软件实现上述方案。
215.进一步地,所述生成颞下颌关节髁突运动包络面可以理解为绘制颞下颌关节髁突运动包络面。
216.相应地,本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线的装置,所述装置包括:
217.截面曲线生成单元,用于根据前述方法生成多条颞下颌关节髁突运动包络面截面曲线方程;
218.曲线生成单元,用于根据多条所述颞下颌关节髁突运动包络面截面曲线方程生成多条颞下颌关节髁突运动包络面曲线;
219.曲面生成单元,用于根据所述多条颞下颌关节髁突运动包络面曲线生成颞下颌关节髁突运动包络面。
220.本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法,所述方法包括:
221.获取目标颅面特征以及目标面型参数;
222.结合所述目标颅面特征获取基准面型参数以及基准截面拟合曲线方程;
223.根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵;
224.根据所述矩阵以及所述目标面型参数生成目标截面曲线。
225.在本实例中,所述基于面型参数生成颞下颌关节髁突运动包络面截面曲线方法中各步骤与前述步骤s100至步骤s400的具体实现方式对应相同,在此不再赘述。
226.本技术还提供一种基于面型参数生成颞下颌关节髁突运动包络面截面曲线的装置,所述装置包括:
227.参数获取单元,用于获取目标颅面特征以及目标面型参数;
228.曲线方程拟合单元,用于结合所述目标颅面特征获取基准面型参数以及基准截面拟合曲线方程;
229.矩阵生成单元,用于根据所述基准面型参数以及所述基准截面拟合曲线方程生成矩阵;
230.所述曲线拟合单元还用于,根据所述矩阵以及所述目标面型参数生成目标截面曲线。
231.在本技术中,各单元具体用于实现各对应步骤的方案。
232.本技术提供的方法使用基准面型参数以及基准截面曲线生成矩阵,并将所述矩阵作为生成目标髁突运动包络面截面曲线的转换中介,在确定所述目标头颅的面型参数后,再利用所述矩阵可逆运算获得目标截面曲线,进一步地,根据同一目标头颅的面型参数获得多条目标截面曲线,所述多条目标截面曲线可构成目标髁突运动包络面。
233.本技术提供的方法对颞下颌关节髁突运动包络面的形态进行简化表达,并涵盖其主要形态特征,进一步地,提出上述简化形态的颞下颌关节髁突运动包络面的数学表达方法,使得所述颞下颌关节髁突运动包络面的形态信息能够被定量研究。
234.可以理解的是,本技术提供的方法能够生成目标髁突运动包络面的任意截面上的截面曲线,例如,目标髁突运动包络面在目标头颅矢状截面上的截面曲线,还可为所述目标髁突运动包络面在目标头颅其它具代表性截面上的截面曲线。
235.以上结合具体实施方式和范例性实例对本技术进行了详细说明,不过这些说明并不能理解为对本技术的限制。本领域技术人员理解,在不偏离本技术精神和范围的情况下,可以对本技术技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本技术的范围内。本技术的保护范围以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1