负障碍物检测方法、装置及电子设备与流程
本发明涉及障碍物检测,具体涉及负障碍物检测方法、装置及电子设备。
背景技术:
1、当机器人的运行环境中存在负障碍物,例如台阶、断层、楼梯等场景时,机器人执行自主导航任务将面临跌落的风险,容易造成机器损害,甚至人员伤亡。如图1所示,常用的负障碍物检测主要靠机器人下方安装红外等传感器对地面进行检测,如检测距离大于传感器的安装高度,或超出检测范围,则认为是检测到负向障碍。
2、此方法可简单有效的检测到跌落等情况,在家用扫地机器人上有广泛应用。但是,此方法的使用前提是机器人刹车距离足够短,机器人在检测到负向障碍物时能及时停下,才不会发送跌落的情况。在移动速度很慢,重量小的机器人上可应用。在商用机器人领域采用此方法则容易出现危险,商用机器人通常重量超过100kg,移动速度也达到1m/s,刹车距离通常在30~50cm。如不能提前检测到负向障碍,则是非常危险的。
技术实现思路
1、有鉴于此,本发明实施例提供了一种负障碍物检测方法、装置及电子设备,以解决负障碍物的检测问题。
2、根据第一方面,本发明实施例提供了一种负障碍物检测方法,包括:
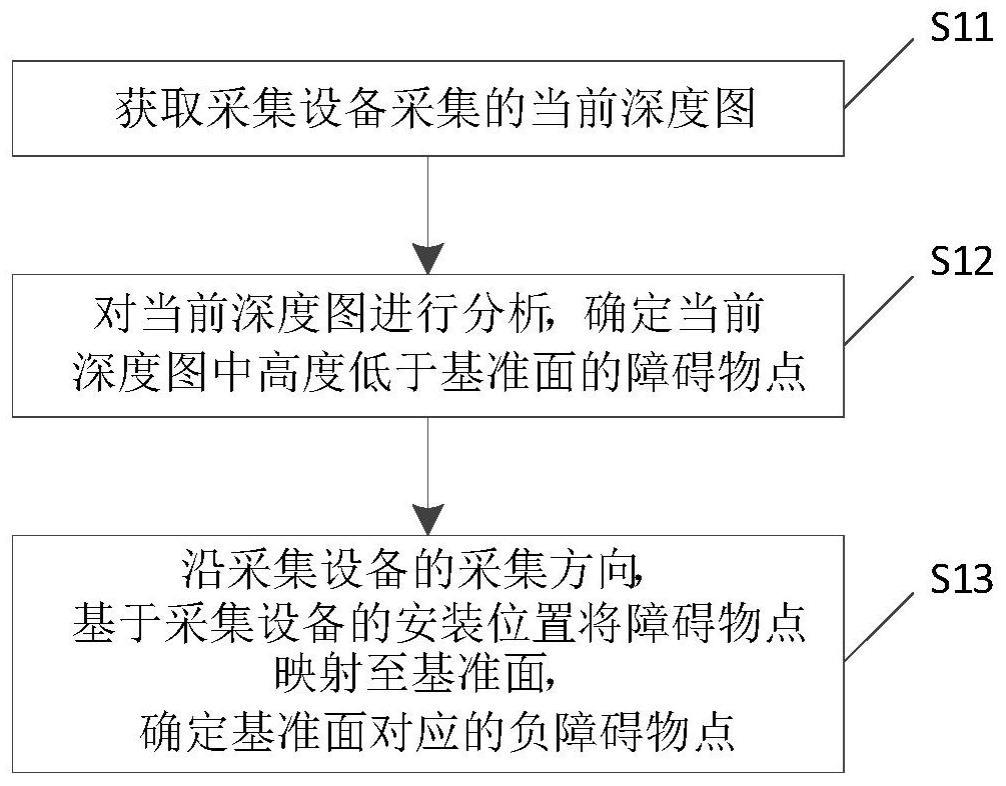
3、获取采集设备采集的当前深度图;
4、对所述当前深度图进行分析,确定所述当前深度图中高度低于基准面的障碍物点,所述基准面为所述采集设备的行走面;
5、沿所述采集设备的采集方向,基于所述采集设备的安装位置将所述障碍物点映射至所述基准面,确定所述基准面对应的负障碍物点。
6、本发明实施例提供的负障碍物检测方法,在确定出低于基准面的障碍物点之后,沿采集设备的采集方向将障碍物点映射至基准面,即,将障碍物点反向填补到基准面,使得所得到的负障碍物点与基准面在同一高度,一方面能够提前检测到负障碍物点,另一避免由于障碍物点离基准面的边缘较远检测不到点的情况,提高了负障碍物点检测的可靠性。
7、结合第一方面,在第一方面第一实施方式中,所述沿所述采集设备的采集方向,基于所述采集设备的安装位置将所述障碍物点映射至所述基准面,确定所述基准面对应的负障碍物点,包括:
8、获取所述采集设备的安装位置;
9、沿所述采集设备的采集方向,基于所述安装位置以及所述各个障碍物点的位置,对低于所述基准面的部分进行填补,确定与所述基准面的高度一致的所述负障碍物点。
10、本发明实施例提供的负障碍物检测方法,通过利用安装位置将各个障碍物点填补到基准面,就相当于将最近可观测到的障碍物点映射值基准面的边缘位置,有效增加对负障碍物的可观测范围。
11、结合第一方面第一实施方式,在第一方面第二实施方式中,所述沿所述采集设备的采集方向,基于所述安装位置以及所述各个障碍物点的位置,对低于所述基准面的部分进行填补,确定与所述基准面的高度一致的所述负障碍物点,包括:
12、获取所述采集设备在至少两个采集角度确定出的负障碍物点;
13、对所有所述负障碍物点进行融合,确定所述负障碍物的大小信息。
14、本发明实施例提供的负障碍物检测方法,通过将至少两个采集角度确定出的负障碍物点进行融合,能够得到较全面的负障碍物的信息,提高了负障碍物检测的完整性。
15、结合第一方面,在第一方面第三实施方式中,所述对所述当前深度图进行分析,确定所述当前深度图中高度低于基准面的障碍物点,包括:
16、获取所述采集设备的内参以及外参;
17、基于所述内参以及所述外参将所述当前深度图转换为目标载体坐标系下的目标点云;
18、基于所述目标点云的高度与所述基准面的高度的大小关系,确定所述障碍物点云。
19、结合第一方面,在第一方面第四实施方式中,所述对所述当前深度图进行分析,确定所述当前深度图中高度低于基准面的障碍物点,包括:
20、获取所述采集设备的内参;
21、基于所述内参将所述当前深度图转换为相机坐标系下的当前点云;
22、对所述当前点云进行平面拟合,得到拟合平面;
23、将所述拟合平面中高度低于所述基准面高度的点确定为对应于所述障碍物点云的点。
24、结合第一方面,在第一方面第五实施方式中,所述对所述当前深度图进行分析,确定所述当前深度图中高度低于基准面的障碍物点,包括:
25、获取目标深度图,所述目标深度图是利用所述采集设备的内参以及外参对所述采集设备采集的初始深度图进行坐标系转化并基于转化结果与所述采集设备所采集的基准面的高度确定的;
26、基于所述当前深度图中各个像素点的像素值与所述目标深度图中对应像素点的像素值的大小关系,确定所述障碍物点。
27、本发明实施例提供的负障碍物检测方法,由于目标深度图是基于目标深度相机的内参、外参以及基准面的像素点高度确定的,那么,该目标深度图中各个像素点均认为是基准面的像素点的像素点,因此在确定出目标深度图之后,后续采集到的深度图仅需要与该目标深度图进行比较,即可确定出障碍物点,提高了障碍物点检测的效率。
28、结合第一方面第五实施方式,在第一方面第六实施方式中,所述获取目标深度图包括:
29、获取所述初始深度图;
30、利用所述内参将所述初始深度图转换为相机坐标系下的第一点云数据;
31、利用所述外参将所述第一点云数据转换为所述目标载体坐标系下的第二点云数据;
32、提取所述第二点云数据中的高度点云数据;
33、基于所述高度点云数据以及所述基准面的高度的关系,确定所述目标深度图。
34、本发明实施例提供的负障碍物检测方法,在目标深度图的计算过程中,结合基准面的像素点的高度进行计算,即,在目标深度图的计算过程中考虑到了采集设备的采集噪声,保证了目标深度图的准确性。
35、根据第二方面,本发明实施例还提供了一种负障碍物检测装置,包括:
36、获取模块,用于获取采集设备采集的当前深度图;
37、分析模块,用于对所述当前深度图进行分析,确定所述当前深度图中高度低于基准面的障碍物点,所述基准面为所述采集设备的行走面;
38、映射模块,用于沿所述采集设备的采集方向,基于所述采集设备的安装位置将所述障碍物点映射至所述基准面,确定所述基准面对应的负障碍物点。
39、根据第三方面,本发明实施例提供了一种电子设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或者第一方面的任意一种实施方式中所述的负障碍物检测方法。
40、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行第一方面或者第一方面的任意一种实施方式中所述的负障碍物检测方法。
41、需要说明的是,本发明实施例提供的负障碍物检测装置、电子设备及计算机可读存储介质的相应有益效果,请参见上文负障碍物检测方法的对应有益效果的描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!