一种基于KNN的点云数据自适应降噪方法
本发明涉及三维信息处理,更具体地,涉及一种基于knn的点云数据自适应降噪方法。
背景技术:
1、点云数据是利用激光雷达等设备对现实场景采样的点的集合,包含了距离、坐标等空间三维信息。利用点云数据对物体或场景进行三维重建,能够恢复出逼真的三维模型或表面。该项技术能够被广泛运用于逆向工程、地图测绘、自动驾驶、医疗等领域,同时也是目前计算机工程领域的研究热点之一。然而在实际操作中,由于设备、环境等因素的影响,任何设备采集的点云数据会包含诸多噪声,例如孤立的离散点、表面不平整等,直接进行三维重建将会严重影响重建效果,所以通常情况下会在点云数据处理前首先进行降噪。
2、knn(k-nearest neighbor,k最近邻)算法被广泛用于数据分类、点云降噪等领域。利用knn算法进行点云降噪的一般过程为:计算点云数据中某一点与其邻域内k个点的欧氏距离,通过该距离的均值与设定的距离阈值进行比较,以此来判断该点是否为离散噪声点。
3、knn算法中,k值与距离阈值的取值十分重要,会直接影响降噪效果。对于k值的选取,较小的k值会导致算法仅与较小邻域内的点进行比较,对于呈片状的离散点无法去除;较大的k值会导致求得的距离均值失去意义。对于距离阈值的选取,较小的距离阈值会导致约束过于严格,导致点云中某些局部密度较低的正常点被错误地剔除,形成空洞;较大的距离阈值则由于约束过于宽松,使得离散点不能被完全去除。同一组k值与距离阈值难以对不同点云进行良好的降噪处理,因此目前在使用knn对点云数据降噪前,需要根据输入点云密度等特征,依据经验人工设定k值与距离阈值。
技术实现思路
1、本发明的目的是提供一种基于knn的点云数据自适应降噪方法,用于实现对点云数据的自适应去除离散点与平滑。
2、为了解决上述问题,本发明提供一种基于knn的点云数据自适应降噪方法,包括以下步骤:
3、根据点云数据确定最邻域点个数k,k=an,其中n为点云数据中点的数量,a为0.021%-0.03%,k为整数,
4、对于点云数据中任一点,利用3-sigma规则判断该点是否为其最邻域内的离散点。
5、优选地,该方法进一步包括
6、对于点云数据中任一点i,使用knn算法求出该点i与其最邻域k个点的距离均值di,点云数据所有点的di值构成集合d;
7、计算集合d的标准差dstd与均值dmean;
8、利用下面公式判断点i是否为离散点
9、|di-dmean|<3·dstd
10、如果点i为离散点,从点云数据中删除该点。
11、优选地,所述距离为欧氏距离或曼哈顿距离。
12、优选地,所述a为0.025%,且k不小于10。
13、优选地,该方法包括
14、对于点云数据中任一点i(xi,yi,zi),将使用knn算法确定的该点最邻域内k个点组成集合ui;
15、获取该集合ui中每一点j的第一坐标值xj;
16、针对集合ui中所有点,计算这些点第一坐标值的标准差xstd和均值xmean;
17、将集合中每一点j是否符合下面公式,将符合公式的点j组成集合vi;
18、|xj-xmean|<3·xstd
19、对集合vi中所有点的第一坐标值取均值,将该均值作为该点i的第一坐标值。
20、优选地,该方法包括
21、获取该集合ui中每一点j的第二坐标值yj;
22、针对集合ui中所有点,计算这些点第二坐标值的标准差ystd和均值ymean;
23、将集合中每一点j是否符合下面公式,将符合公式的点j组成集合wi;
24、|yj-ymean|<3·ystd
25、对集合wi中所有点的第二坐标值取均值,将该均值作为该点i的第二坐标值。
26、优选地,该方法包括
27、获取该集合ui中每一点j的第三坐标值zj;
28、针对集合ui中所有点,计算这些点第三坐标值的标准差zstd和均值zmean;
29、将集合中每一点j是否符合下面公式,将符合公式的点j组成集合pi;
30、|zj-zmean|<3·zstd
31、对集合pi中所有点的第三坐标值取均值,将该均值作为该点i的第三坐标值。
32、本发明的有益效果如下:
33、1、本发明提供的一种基于knn的点云数据自适应降噪方法,保留了knn降噪算法的特点,易于理解与实现;
34、2、本发明提供的一种基于knn的点云数据自适应降噪方法,实现了依据输入数据自行判断k值和距离阈值,全程不需要人工干预;
35、3、本发明提供的一种基于knn的点云数据自适应降噪方法,仅依靠单帧点云中邻域点的相对距离和坐标进行降噪,有效进行离散点的去除与表面平滑,降噪性能良好,适用范围广,适用于包括散乱点云在内的绝大多数点云数据,不需要灰度图像等参考数据。
技术特征:
1.一种基于knn的点云数据自适应降噪方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于knn的点云数据自适应降噪方法,其特征在于,该方法进一步包括
3.根据权利要求2所述的基于knn的点云数据自适应降噪方法,其特征在于,所述距离为欧氏距离或曼哈顿距离。
4.根据权利要求1所述的基于knn的点云数据自适应降噪方法,其特征在于,所述a为0.025%,且k不小于10。
5.根据权利要求1或2所述的基于knn的点云数据自适应降噪方法,其特征在于,该方法包括
6.根据权利要求5所述的基于knn的点云数据自适应降噪方法,其特征在于,该方法包括
7.根据权利要求6所述的基于knn的点云数据自适应降噪方法,其特征在于,该方法包括
技术总结
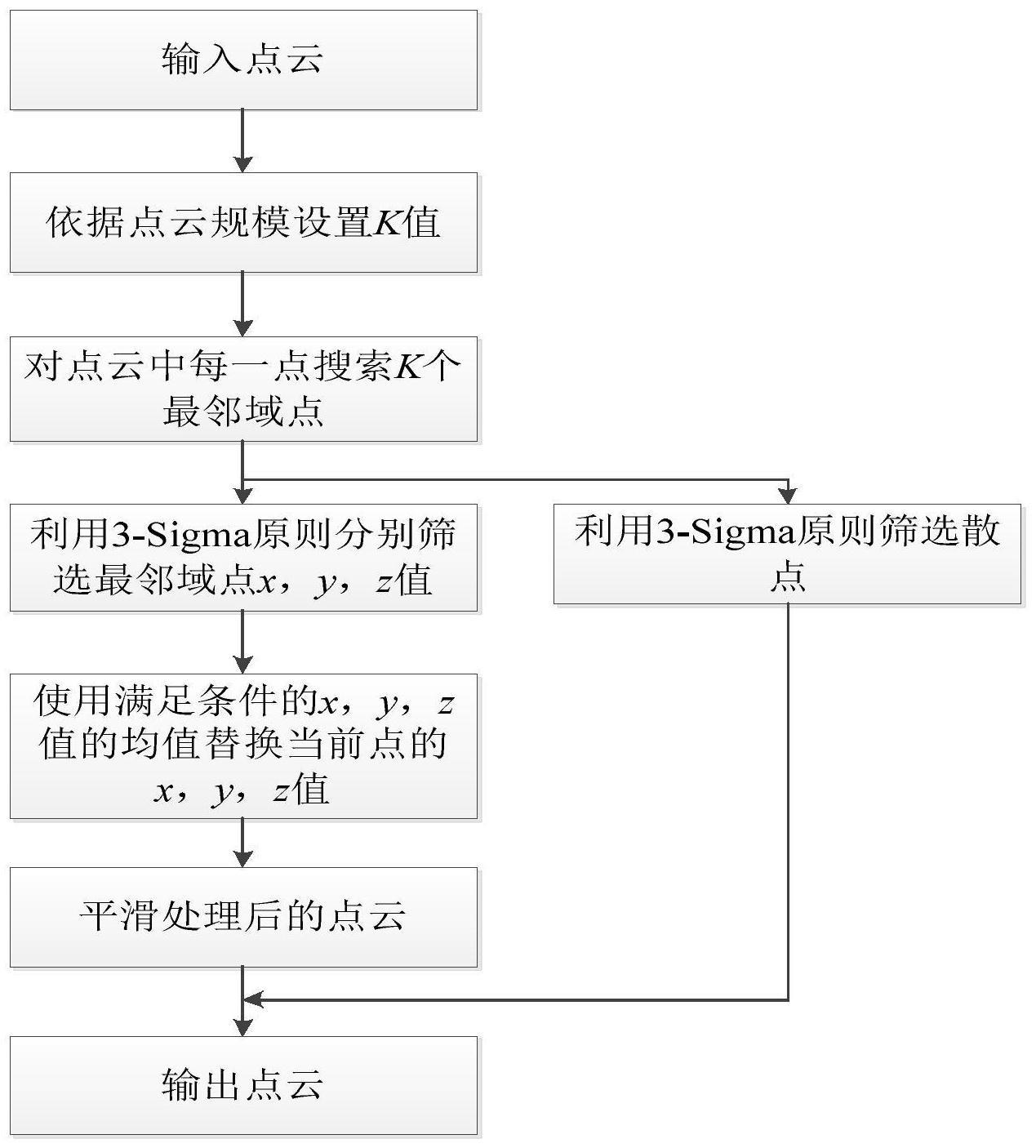
本发明提供一种基于KNN的点云数据自适应降噪方法,该方法根据点云数据确定最邻域点个数K,K=an,其中n为点云数据中点的数量,a为0.021%‑0.03%,K为整数,对于点云数据中任一点,利用3‑Sigma规则判断该点是否为其最邻域内的离散点。本发明提供的基于KNN的点云数据自适应降噪方法,依据点云规模自动选取K值,利用3‑Sigma原则,取代手动设定的距离阈值以筛选离散点,并对点云中所有点的x,y,z值进行修正以实现点云平滑,能够实现不需要额外输入任何参数,对输入的点云数据进行KNN降噪操作。
技术研发人员:潘鸣奇,毕勇
受保护的技术使用者:中国科学院理化技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!