一种松材线虫病危害木的识别与定位的方法及系统
1.本发明涉及森林病虫害监测预测技术领域,特别是涉及一种松材线虫病危害木的识别与定位的方法及系统。
背景技术:
2.松材线虫病(pine wilt disease,pwd)是由松材线虫(bursaphelenchus xylophilus)侵染引起的,是可以在短时间内造成松树枯死的一种严重的森林病害,又称松材线虫萎蔫病、松树萎蔫病、松树枯萎病。病害一旦发生,可导致松树在感染后的60-90天内迅速枯死,且传播蔓延快速,3-5年可造成大面积毁林现象的发生,同时病害防治难度极大,被称为松树的“癌症”。
3.在气候变化、经济贸易往来加速等因素的影响下,松材线虫病病害疫区迅速扩展蔓延,由于感病松树难以治愈,病害的早期发现成为松材线虫病病害防控的基本前提,亦是当下亟待解决的问题。经过多年的发展,卫星遥感技术因其所具有的多光谱及多时相特征,在森林病虫害的大尺度监测预测方向得到了广泛的应用及发展。然而,星载遥感技术在森林病虫害应用中仍然存在很多不足:如采集的数据受天气条件影响较大,阴雨天采集的数据会带有较大误差;适合大尺度区域性分析,对小尺度分析,尤其是对病虫害侵扰的探测很难达到理想的精度要求,对植物病虫害发生初期的症状检测灵敏度不足。因此,如何对松材线虫病早期危害木进行准确识别和精确定位是遏止病害爆发蔓延的关键所在。
技术实现要素:
4.本发明的目的是提供一种松材线虫病危害木的识别与定位的方法及系统,能够实现松材线虫病早期危害木的准确识别和精确定位。
5.针对现有技术的不足,本发明提出一种松材线虫病危害木的识别与定位的方法,其中所述方法包括:
6.步骤1、利用空中高光谱成像传感器获取监测区域内植被的原始高光谱图像,所述监测区域内植被包括健康植被和多等级的危害木;
7.步骤2、为每株危害木的原始高光谱图像匹配对应的病害等级,得到具有病害等级的危害木图像;
8.步骤3、以所述危害木图像为训练数据,训练特征图谱识别模型,并将训练完成的特征图谱识别模型作为病害识别特征图谱模型;
9.步骤4、所述空中高光谱成像传感器定期获取所述监测区域内植被的原始高光谱图像,组成多期高光谱图像;
10.步骤5、将所述多期高光谱图像输入所述病害识别特征图谱模型,识别所述监测区域内各危害木的病害等级及其对应的病害识别特征图谱;
11.步骤6、提取各病害识别特征图谱的时序特征,并对其进行时间序列预测分析,确定各危害木等级为病害早期的识别时间;
12.步骤7、根据各病害等级对应的病害识别特征图谱,提取所述危害木识别时间对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集;
13.步骤8、对所述时-空-谱特征图谱数据集进行分类,以定位早期危害木。
14.所述的松材线虫病危害木的识别与定位的方法,其中所述步骤2包括:
15.获取监测区域内所述不同等级的危害木位置;
16.对各期所述不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像;
17.根据所述不同等级的危害木定位,对所述高光谱预处理图像进行标注,得到基于时序的高光谱图像的像素标签数据集;
18.从所述基于时序的高光谱图像的像素标签数据集中提取不同等级危害木的单木冠幅图像数据;
19.将所述不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
20.所述的松材线虫病危害木的识别与定位的方法,其中所述步骤3包括:
21.测定不同等级的危害木的生理生化参数,所述生理生化参数包括色素含量、含水量、蒸腾速率和光合指数等;
22.根据所述表征不同病害等级的危害木图像,分析所述不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数;
23.提取所述原始高光谱图像的区域平均光谱;
24.根据所述表征不同病害等级的危害木最佳量化参数,筛选所述区域平均光谱的敏感波段,得到敏感波段的单波段图像数据;
25.根据所述单波段图像数据,确定植物病害的光谱指数;
26.根据不同病害等级的所述单波段图像,确定图像几何信息;
27.根据所述表征病害等级的生理生化参数分析所述单波段图像、所述光谱指数和所述图像几何信息的相关性,得到不同病害等级的病害识别特征图谱;
28.以所述表征不同病害等级的危害木图像为输入,以所述不同病害等级的病害识别特征图谱为输出,对所述特征图谱识别模型进行训练。
29.所述的松材线虫病危害木的识别与定位的方法,其中所述步骤8包括:
30.采用最优分类算法提取所述危害木早期识别时-空-谱特征图谱数据集的时-谱特征和空-谱特征;根据所述时-谱特征和所述空-谱特征,得到早期危害木的定位。
31.所述的松材线虫病危害木的识别与定位的方法,其中所述步骤8包括:
32.通过最优分类算法对所述危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像;对所述逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
33.本发明还提出了一种松材线虫病危害木的识别与定位的系统,其中所述方法包括:
34.原始图像获取模块,用于通过空中高光谱成像传感器获取监测区域内植被的原始高光谱图像,所述监测区域内植被包括健康植被和多等级的危害木;
35.预处理模块,用于为每株危害木的原始高光谱图像匹配对应的病害等级,得到具
有病害等级的危害木图像;
36.训练模块,用于以所述危害木图像为训练数据,训练特征图谱识别模型,并将训练完成的特征图谱识别模型作为病害识别特征图谱模型;
37.多期原始高光谱图像获取模块,用于通过所述空中高光谱成像传感器定期获取所述监测区域内植被的原始高光谱图像,组成多期高光谱图像;
38.病害识别特征图谱获取模块,用于将所述多期高光谱图像输入所述病害识别特征图谱模型,识别所述监测区域内各危害木的病害等级及其对应的病害识别特征图谱;
39.时序特征确定模块,用于提取各病害识别特征图谱的时序特征,并对其进行时间序列预测分析,确定各危害木等级为病害早期的识别时间;
40.特征图谱数据集确定模块,用于根据各病害等级对应的病害识别特征图谱,提取所述危害木识别时间对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集;
41.定位模块,用于对所述时-空-谱特征图谱数据集进行分类,以定位早期危害木。
42.所述的松材线虫病危害木的识别与定位的系统,其中所述预处理模块用于:
43.获取监测区域内所述不同等级的危害木位置;
44.对各期所述不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像;
45.根据所述不同等级的危害木定位,对所述高光谱预处理图像进行标注,得到基于时序的高光谱图像的像素标签数据集;
46.从所述基于时序的高光谱图像的像素标签数据集中提取不同等级危害木的单木冠幅图像数据;
47.将所述不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
48.所述的松材线虫病危害木的识别与定位的系统,其中所述训练模块用于:
49.测定不同等级的危害木的生理生化参数,所述生理生化参数包括色素含量、含水量、蒸腾速率和光合指数等;
50.根据所述表征不同病害等级的危害木图像,分析所述不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数;
51.提取所述原始高光谱图像的区域平均光谱;
52.根据所述表征不同病害等级的危害木最佳量化参数,筛选所述区域平均光谱的敏感波段,得到敏感波段的单波段图像数据;
53.根据所述单波段图像数据,确定植物病害的光谱指数;
54.根据不同病害等级的所述单波段图像,确定图像几何信息;
55.根据所述表征病害等级的生理生化参数分析所述单波段图像、所述光谱指数和所述图像几何信息的相关性,得到不同病害等级的病害识别特征图谱;
56.以所述表征不同病害等级的危害木图像为输入,以所述不同病害等级的病害识别特征图谱为输出,对所述特征图谱识别模型进行训练。
57.所述的松材线虫病危害木的识别与定位的系统,其中所述步骤8包括:
58.采用最优分类算法提取所述危害木早期识别时-空-谱特征图谱数据集的时-谱特
征和空-谱特征;根据所述时-谱特征和所述空-谱特征,得到早期危害木的定位。
59.所述的松材线虫病危害木的识别与定位的系统,其中所述定位模块用于:
60.通过最优分类算法对所述危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像;对所述逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
61.由以上方案可知,本发明的优点在于:
62.本发明提供的一种松材线虫病危害木的识别与定位的方法,包括:利用无人机搭载的高光谱成像传感器获取监测区域内植被的原始高光谱图像;监测区域内植被包括健康的植被和不同等级的危害木;对不同等级的危害木的原始高光谱图像进行预处理,得到表征不同病害等级的危害木图像;基于机器学习算法构建病害识别特征图谱模型;以表征不同病害等级的危害木图像为输入,对病害识别特征图谱模型进行训练,得到训练好的病害识别特征图谱模型;利用无人机搭载的高光谱成像传感器按照设定时间间隔获取多期监测区域内植被的原始高光谱图像;将多期监测区域内植被的原始高光谱图像输入训练好的病害识别特征图谱模型,输出不同病害等级的病害识别特征图谱;基于不同病害等级的病害识别特征图谱,确定病菌侵染危害木特征图谱对应的时序特征;基于时序特征,采用时间序列预测分析方法,确定危害木早期识别的时间点;时间点为危害木等级为病害早期的时间区间;根据不同病害等级的病害识别特征图谱,提取危害木早期识别的时间点对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集;基于危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木。本发明通过确定危害木早期识别时间点,得到危害木早期识别特征图谱,利用危害木早期识别特征图谱确定最优分类算法;利用最优分类算法,对待定位的原始高光谱图像中的早期危害木能够实现准确识别和精确定位。
附图说明
63.图1为本发明提供的松材线虫病危害木的识别与定位的方法流程图;
64.图2为本发明提供的松材线虫病危害木的识别与定位的系统框图。
65.符号说明:
66.原始图像获取模块—1,预处理模块—2,构建模块—3,训练模块—4,获取多期原始高光谱图像—5,病害识别特征图谱获取模块—6,时序特征确定模块—7,早期识别时间点确定模块—8,特征图谱数据集确定模块—9,定位模块—10。
具体实施方式
67.为实现上述目的,本发明提供了如下方案:
68.一种松材线虫病危害木的识别与定位的方法,所述方法包括:
69.利用无人机搭载的高光谱成像传感器获取监测区域内植被的原始高光谱图像;所述监测区域内植被包括健康的植被和不同等级的危害木;
70.对所述不同等级的危害木的原始高光谱图像进行预处理,得到表征不同病害等级的危害木图像;
71.基于机器学习算法构建病害识别特征图谱模型;
72.以所述表征不同病害等级的危害木图像为输入,对所述病害识别特征图谱模型进行训练,得到训练好的病害识别特征图谱模型;
73.利用无人机搭载的高光谱成像传感器按照设定时间间隔获取多期监测区域内植被的原始高光谱图像;
74.将多期监测区域内植被的原始高光谱图像输入所述训练好的病害识别特征图谱模型,输出每株危害木对应的不同病害等级的病害识别特征图谱;
75.基于所述不同病害等级的病害识别特征图谱,确定病菌侵染危害木特征图谱对应的时序特征;
76.基于所述时序特征,采用时间序列预测分析方法,确定危害木早期识别的时间点;所述时间点为危害木等级为病害早期的时间区间;
77.根据不同病害等级的病害识别特征图谱,提取所述危害木早期识别的时间点对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集;
78.基于所述危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木,图像每个像素都对应地理坐标,在完成分类后,不同类别对应的像素的地理坐标即为定位;所述最优分类算法是以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标对多个分类算法进行评价得到的定位精度最高的算法。
79.可选地,所述对所述不同等级的危害木的原始高光谱图像进行预处理,得到表征不同病害等级的危害木图像,具体包括:
80.获取监测区域内所述不同等级的危害木定位;
81.对各期所述不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像;
82.根据所述不同等级的危害木定位,对所述高光谱预处理图像进行标注,得到基于时序的高光谱图像的像素标签数据集;
83.从所述基于时序的高光谱图像的像素标签数据集中提取不同等级危害木的单木冠幅图像数据;
84.将所述不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
85.可选地,所述以所述表征不同病害等级的危害木图像为输入,对所述病害识别特征图谱模型进行训练,得到训练好的病害识别特征图谱模型,具体包括:
86.通过实验室测定不同等级危害木的生理生化参数;所述不同等级危害木的生理生化参数包括色素含量、含水量、蒸腾速率和气孔导度等;
87.根据所述表征不同病害等级的危害木图像,分析所述不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数;
88.提取所述原始高光谱图像的区域平均光谱;
89.根据所述表征不同病害等级的危害木最佳量化参数,筛选所述区域平均光谱的敏感波段,得到敏感波段的单波段图像数据;
90.根据所述单波段图像数据,确定植物病害的光谱指数;
91.根据不同病害等级的所述单波段图像,确定图像几何信息;
92.根据所述表征病害等级的生理生化参数分析所述单波段图像、所述光谱指数和所
述图像几何信息的相关性,得到不同病害等级的病害识别特征图谱;
93.以所述表征不同病害等级的危害木图像为输入,以所述不同病害等级的病害识别特征图谱为输出,对所述病害识别特征图谱模型进行训练。
94.可选地,所述基于所述危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木;具体包括:
95.采用最优分类算法提取所述危害木早期识别时-空-谱特征图谱数据集的时-谱特征;
96.采用最优分类算法提取所述危害木早期识别时-空-谱特征图谱数据集的空-谱特征;
97.根据所述时-谱特征和所述空-谱特征,得到早期危害木的定位。
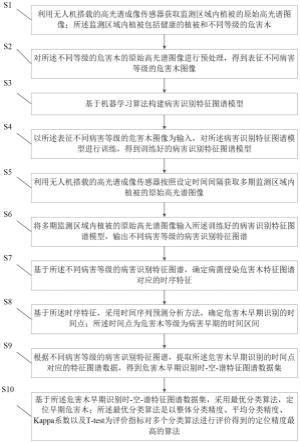
98.可选地,所述基于所述危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木;所述最优分类算法是以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标对多个分类算法进行评价得到的定位精度最高的算法,具体包括:
99.通过最优分类算法对所述危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像;
100.对所述逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
101.为让本发明的上述特征和效果能阐述的更明确易懂,下文特举实施例,并配合说明书附图作详细说明如下。
102.本发明的目的是提供一种松材线虫病危害木的识别与定位的方法及系统,能够实现松材线虫病早期危害木的准确识别和精确定位。
103.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
104.如图1所示,本发明提供的一种松材线虫病危害木的识别与定位的方法,包括:
105.步骤s1:利用无人机搭载的高光谱成像传感器获取监测区域内植被的原始高光谱图像;监测区域内植被包括健康的植被和不同等级的危害木。
106.具体的,利用无人机搭载高光谱成像传感器获取一次覆盖研究区范围植物的原始高光谱图像或者以一定时间间隔连续多次获取覆盖研究区范围植物的原始高光谱图像;该时间间隔为5-7天。
107.进一步的,以在近两年松材线虫病害发生的重点疫区为例,以广东、河南、辽宁等地区确定同时包含受害木及健康木的区域作为主要试验区,建立30m
×
30m的方形连续监测样地20块,样地间间隔30m,开展基础调查;以五点法在每个样地选取10-20株单木(样木包含样地内所有受害木)作为实验标准木进行编号(年-树号)并开展后续调查分析,同时,每年依据发病情况,将样地内新增受害木加入调查范围并编号;依托松材线虫和松褐天牛生命周期及松材线虫病病害发生主要阶段,每年春季,温度达到15℃以上时开始第一次调查,此后具体时间以试验地松材线虫幼虫繁殖周期的具体时间确定,直至松褐天牛进入越冬期停止。每次调查包括地面数据调查及对应无人机数据获取。
108.步骤s2:对不同等级的危害木的原始高光谱图像进行预处理,得到表征不同病害等级的危害木图像。
109.s2具体包括:
110.步骤s21:获取监测区域内不同等级的危害木定位。
111.具体的,在获取覆盖研究区范围植物的原始高光谱图像的同时,对监测区域内的松材线虫危害木的危害等级进行地面调查,确定危害木的危害等级以及该危害木的定位。
112.步骤s22:对各期不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像。具体的,高光谱预处理图像为无人机高光谱时间序列数据集。
113.步骤s23:根据不同等级的危害木定位,对高光谱预处理图像进行标注,得到基于时序的高光谱图像的像素标签数据集。
114.具体的,依据危害木定位,在连续多次获取的原始高光谱图像上,通过图像标注软件对不同等级危害木进行分类标注,分类依据如表1所示,形成基于时序高光谱图像的像素标签数据集。
115.表1松材线虫病受害木等级划分标准
[0116][0117][0118]
作为本实施例的一个具体实施方式,地面调查以单木为调查单位展开。获取所有试验样木的失叶/枯叶率数据(按照东、西、南、北四个方向分别从上、中、下三层随机剪取标准枝,带回室内进行失叶/枯叶率计算);对样地内每株受害木,根据树势生长状况、松针颜色及松脂流量变化,将不同受害程度的松树分为五个阶段,具体标准如上表1所示;此外,获取样木的不同变色程度针叶的asd光谱数据、叶绿素含量数据、蒸腾速率以及含水量数据;样地及受害木gps坐标信息、林分结构及林龄、郁闭度、单木冠幅等。
[0119]
作为本实施例的一个具体实施方式,近地机载遥感影像数据利用八旋翼无人机,同步搭载高清数码相机及高光谱成像仪(uhd185或其他)获取,选择晴朗无风的天气,在中
午10:00-14:00之间进行。依据试验样地地形、植被情况及覆盖面积,设定飞行高度50-100m。获取覆盖所有样地的高光谱影像及同步高清数码影像。飞行区域内放置黑白标准板,为高光谱影像提供辐射定标参数。利用photoscan实现高光谱数据及高清数码影像的定标,拼接并利用envi5.3实现辐射校正。
[0120]
步骤s24:从基于时序的高光谱图像的像素标签数据集中提取不同等级危害木的单木冠幅图像数据。具体的,从无人机高光谱时间序列数据集和基于时序的高光谱图像的像素标签数据集中,提取健康、开始侵染、早期、中期及晚期死亡阶段的单木冠幅图像数据。
[0121]
步骤s25:将不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
[0122]
步骤s3:基于机器学习算法构建病害识别特征图谱模型。
[0123]
步骤s4:以表征不同病害等级的危害木图像为输入,对病害识别特征图谱模型进行训练,得到训练好的病害识别特征图谱模型。
[0124]
步骤s41:通过实验室测定不同等级的危害木的生理生化参数;不同等级危害木的生理生化参数包括色素含量、含水量、蒸腾速率和气孔导度等。
[0125]
步骤s42:根据表征不同病害等级的危害木图像,分析不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数。
[0126]
具体的,表征不同病害等级的危害木图像为不同等级危害木的单木冠幅图像数据;基于不同等级危害木的单木冠幅图像数据,针对病害发生不同阶段,也就是病害处于不同的等级,对应实验室测定的不同等级的危害木的生理生化参数,分析叶绿素含量、含水量、蒸腾速率、光合速率,类胡萝卜素等针叶生理生化参数的时序变化特征,综合单木失叶/枯叶率数据,确定在病害不同时期能够表征病害等级的最佳量化参数。
[0127]
步骤s43:提取原始高光谱图像的区域平均光谱。
[0128]
步骤s44:根据表征不同病害等级的危害木最佳量化参数,筛选区域平均光谱的敏感波段,得到敏感波段的单波段图像数据。
[0129]
具体的,基于区域平均光谱,以各病害时期确定的最佳量化参数为因变量,对区域平均光谱进行敏感波段筛选,提取各敏感波段的单波段图像;进一步的,筛选的方法为类间不稳定指数(isic)、主成分分析(pca)或连续投影变换(spa)。
[0130]
步骤s45:根据单波段图像数据,确定植物病害的光谱指数。
[0131]
具体的,根据单波段图像数据,构建归一化植被指数(ndvi)、差值植被指数(dvi)、转化叶绿素吸收反射指数(tcari)等病害监测的有效光谱指数。
[0132]
步骤s46:根据不同病害等级的单波段图像,确定图像几何信息。
[0133]
具体的,根据单波段图像数据,利用色彩空间变换、模式识别等技术分析不同病害阶段对应影像数据的纹理、粗糙度、形状等冠层几何信息。
[0134]
步骤s47:根据表征病害等级的生理生化参数分析单波段图像、光谱指数和图像几何信息的相关性,得到不同病害等级的病害识别特征图谱。
[0135]
具体的,针对不同病害时期,以该时期特定的量化表征参数为因变量,在病害晚期特征明显时,以失叶/枯叶率为因变量,综合分析筛选得到的敏感波段、特征光谱指数、图像几何信息、纹理信息、亮度信息、色度信息的相关性,得到不同病害等级的病害识别特征图谱;进一步的,综合分析的方法为相关性分析类似的统计学方法。
[0136]
步骤s48:以表征不同病害等级的危害木图像为输入,以不同病害等级的病害识别特征图谱为输出,对病害识别特征图谱模型进行训练。
[0137]
步骤s5:利用无人机搭载的高光谱成像传感器按照设定时间间隔获取多期监测区域内植被的原始高光谱图像;具体的,设定时间间隔为5-7天;在实际应用中,获取的多期监测区域内植被的原始高光谱图像是对监测区域内的植被进行监测过程中,通过无人机搭载的高光谱成像传感器获取的,需要对获取的多期监测区域内植被的原始高光谱图像进行早期危害木的识别和定位。
[0138]
步骤s6:将多期监测区域内植被的原始高光谱图像输入训练好的病害识别特征图谱模型,输出不同病害等级的病害识别特征图谱。
[0139]
步骤s7:基于不同病害等级的病害识别特征图谱,确定病菌侵染危害木特征图谱对应的时序特征。
[0140]
具体的,基于在不同病害时期获取的不同病害等级的病害识别特征图谱,得到病害发生整体过程的不同病害等级的病害识别特征图谱,从而确定病菌侵染危害木特征图谱对应的时序特征。
[0141]
步骤s8:基于时序特征,采用时间序列预测分析方法,确定危害木早期识别的时间点。时间点为危害木等级为病害早期的时间区间。由于被侵染到有早期症状的时间跨度具有普适性,故首先通过配合野外试验数据的方法获取各个时期危害木对应的特征图谱模型(s2-s4),其次利用模型分析某个时间获取的整张图像图谱(s5获取的图像),最后根据已确定的早期时间点对应的特征,明确整张图像上每棵树分别处在什么阶段,即同时确定了处在早期的危害木。
[0142]
具体的,时间序列预测分析方法为原始的自回归移动模型(arma)或求和自回归移动模型(arima)模型。进一步的,采用时间序列预测分析方法构建各生理生化参数的时序模型,以病害等级预测的准确性为依据,确定能够满足整个病害发生期监测需求的危害木特征生理生化参数;危害木特征生理生化参数为单一参数或组合参数。以特征生理生化参数为因变量,以连续采集得到的病害发生过程为时间轴,得到特征生理生化参数在该时间轴的不同病害等级的图谱数据,在该时间轴上,应用相关性分析方法,确定评价指标的平衡点所对应的时间点即为病害木早期识别的时间点。
[0143]
步骤s9:根据不同病害等级的病害识别特征图谱,提取危害木早期识别的时间点对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集,以明确具体特征,然后利用明确的特征来进行精确的分类。其中特征图谱中“空”指的是空间特征,例如目标树相对某一棵树的位置,或相对某两棵树的位置,或相对栅格之间的某种联系。
[0144]
具体的,在该时间轴上,在病害木早期识别的时间段内的图谱数据为危害木早期识别特征图谱。
[0145]
步骤s10:基于危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木;最优分类算法是以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标对多个分类算法进行评价得到的定位精度最高的算法。
[0146]
具体的,有两种定位早期危害木的方法。第一种方法具体包括:
[0147]
步骤201:采用最优分类算法提取危害木早期识别时-空-谱特征图谱数据集的时-谱特征。
[0148]
步骤202:采用最优分类算法提取危害木早期识别时-空-谱特征图谱数据集的空-谱特征。
[0149]
步骤203:根据时-谱特征和空-谱特征,得到早期危害木的定位。
[0150]
第二种方法具体包括:
[0151]
步骤301:通过最优分类算法对危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像。
[0152]
步骤302:对逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
[0153]
其中,在第一种方法中,确定最优分类算法的过程具体包括:
[0154]
步骤2011:分别采用经验模态分解和多尺度信号分解提取危害木早期识别时-空-谱特征图谱数据集的时-谱特征,得到经验模态分解时-谱特征和多尺度信号分解时-谱特征。
[0155]
步骤2012:分别采用光谱梯度增强、广义核支持矢量机分类和稀疏矩阵提取危害木早期识别时-空-谱特征图谱数据集的空-谱特征,得到光谱梯度增强空-谱特征、广义核支持矢量机分类空-谱特征和稀疏矩阵空-谱特征。
[0156]
步骤2013:根据经验模态分解时-谱特征和光谱梯度增强空-谱特征,得到第一分类算法的早期危害木的定位;第一分类算法包括经验模态分解和光谱梯度增强。
[0157]
步骤2014:根据经验模态分解时-谱特征和广义核支持矢量机分类空-谱特征,得到第二分类算法的早期危害木的定位;第二分类算法包括经验模态分解和广义核支持矢量机分类。
[0158]
步骤2015:根据多尺度信号分解时-谱特征和稀疏矩阵空-谱特征,得到第三分类算法的早期危害木的定位;第三分类算法包括多尺度信号分解和稀疏矩阵。
[0159]
步骤2016:基于危害木早期识别特征图谱中危害木早期的定位,以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标分别对多个分类算法的进行评价,确定最优分类算法。
[0160]
在第二种方法中,确定最优分类算法的过程具体包括:
[0161]
步骤3011:分别采用支持矢量机和光谱角制图,基于光谱对危害木早期识别时-空-谱特征图谱数据集进行分类,得到支持矢量机危害木早期定位光谱图像和光谱角制图危害木早期定位光谱图像。
[0162]
步骤3012:采用边缘滤波对支持矢量机危害木早期定位光谱图像进行分割,得到第一分类算法的早期危害木的定位;第一分类算法包括边缘滤波和支持矢量机。
[0163]
步骤3013:采用随机行走模型对支持矢量机危害木早期定位光谱图像进行分割,得到第二分类算法的早期危害木的定位;第二分类算法包括随机行走模型和支持矢量机。
[0164]
步骤3014:采用边缘滤波对光谱角制图危害木早期定位光谱图像进行分割,得到第三分类算法的早期危害木的定位;第三分类算法包括边缘滤波和光谱角制图。
[0165]
步骤3015:采用随机行走模型对光谱角制图危害木早期定位光谱图像进行分割,得到第四分类算法的早期危害木的定位;第四分类算法包括随机行走模型和光谱角制图。
[0166]
步骤3016:基于危害木早期识别特征图谱中危害木早期的定位,以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标对多种分类算法进行评价,得到最优分类
算法。
[0167]
本发明在现有代表性的高光谱数据“空-谱”融合算法里(gsa、pca、sfim、cnmf等),以视觉检验和依托算法耗时(time)、空间特征保持能力(psnr,rmse)、光谱特征保持能力(sam)以及综合融合效果(ergas)等参数形成的量化指标两个大方向为衡量标准,确定适用于松材线虫病害早期识别时间点的最优“空-谱”融合算法,并在已有算法的基础上,加入时间序列分析,形成有针对性的“时-空-谱”优化融合算法,优化并提出适用于松材线虫病受害木识别的特定算法。
[0168]
因此,本发明通过明确松材线虫危害木不同病害等级的病害识别特征图谱、病害木早期识别的时间点及时空谱融合的分类识别方法,形成松材线虫危害木定位识别框架,集成识别系统,将搭载无人机实时图像获取及传输的数据进行分类识别,实现早期危害木自动定位及识别。
[0169]
如图2所示,本发明提供的一种松材线虫病危害木的识别与定位的系统,系统包括:
[0170]
原始图像获取模块1,用于利用无人机搭载的高光谱成像传感器获取监测区域内植被的原始高光谱图像;监测区域内植物包括健康植被和不同等级的危害木。
[0171]
预处理模块2,用于对不同等级的危害木的原始高光谱图像进行预处理,得到表征不同病害等级的危害木图像。
[0172]
构建模块3,用于基于机器学习算法构建病害识别特征图谱模型。
[0173]
训练模块4,用于以表征不同病害等级的危害木图像为输入,对病害识别特征图谱模型进行训练,得到训练好的病害识别特征图谱模型。
[0174]
获取多期原始高光谱图像5,用于利用无人机搭载的高光谱成像传感器按照设定时间间隔获取多期监测区域内植被的原始高光谱图像。
[0175]
病害识别特征图谱获取模块6,用于将多期监测区域内植被的原始高光谱图像输入训练好的病害识别特征图谱模型,输出不同病害等级的病害识别特征图谱。
[0176]
时序特征确定模块7,用于基于不同病害等级的病害识别特征图谱,确定病菌侵染危害木特征图谱对应的时序特征。
[0177]
早期识别时间点确定模块8,用于基于时序特征,采用时间序列预测分析方法,确定危害木早期识别的时间点;时间点为危害木等级为病害早期的时间区间。
[0178]
特征图谱数据集确定模块9,用于根据不同病害等级的病害识别特征图谱,提取危害木早期识别的时间点对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集。
[0179]
定位模块10,用于基于危害木早期识别时-空-谱特征图谱数据集,采用最优分类算法,定位早期危害木;最优分类算法是以整体分类精度、平均分类精度、kappa系数以及t-test为评价指标对多个分类算法进行评价得到的定位精度最高的算法。
[0180]
其中,预处理模块2包括:
[0181]
获取子模块,用于获取监测区域内不同等级的危害木定位。
[0182]
高光谱预处理图像确定子模块,用于对各期不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像。
[0183]
标注子模块,用于根据不同等级的危害木定位,对高光谱预处理图像进行标注,得
到基于时序的高光谱图像的像素标签数据集。
[0184]
提取子模块,用于根据基于时序的高光谱图像的像素标签数据集,提取不同等级危害木的单木冠幅图像数据。
[0185]
确定子模块,用于将不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
[0186]
其中,训练模块4包括:
[0187]
测定子模块,用于通过实验室测定不同等级的危害木的生理生化参数;不同等级危害木的生理生化参数包括色素含量、含水量、蒸腾速率和光合指数。
[0188]
最佳量化参数获取子模块,用于根据表征不同病害等级的危害木图像,分析不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数。
[0189]
平均光谱提取子模块,用于提取原始高光谱图像的区域平均光谱。
[0190]
单波段图像数据确定子模块,用于根据表征不同病害等级的危害木最佳量化参数,筛选区域平均光谱的敏感波段,得到敏感波段的单波段图像数据。
[0191]
光谱指数确定子模块,用于根据单波段图像数据,确定植物病害的光谱指数。
[0192]
图像几何信息确定子模块,用于根据不同病害等级的单波段图像,确定图像几何信息。
[0193]
分析子模块,用于根据表征病害等级的生理生化参数分析单波段图像、光谱指数和图像几何信息的相关性,得到不同病害等级的病害识别特征图谱。
[0194]
特征图谱模型训练子模块,用于以表征不同病害等级的危害木图像为输入,以不同病害等级的病害识别特征图谱为输出,对病害识别特征图谱模型进行训练。
[0195]
其中,定位模块的构成分两种,第一种构成包括:
[0196]
提取时-谱特征子模块,用于采用最优分类算法提取危害木早期识别时-空-谱特征图谱数据集的时-谱特征。
[0197]
提取空-谱特征子模块,用于采用最优分类算法提取危害木早期识别时-空-谱特征图谱数据集的空-谱特征。
[0198]
定位子模块,用于根据时-谱特征和空-谱特征,得到早期危害木的定位。
[0199]
第二种构成包括:
[0200]
基于光谱分类子模块,用于通过最优分类算法对危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像。
[0201]
定位子模块,用于对逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
[0202]
本发明提供的一种松材线虫病危害木的识别与定位的方法的整体设计思路如下所述:
[0203]
从松材线虫侵入到造成树木完全枯死的60-90天内,其寄主植被从无表征性状到针叶全部变成黄褐或红褐色,整个松材线虫病病害的发病过程都存在树木结构、叶绿素、含水量以及其他指标的变化。在整个变化过程中,其在无人机高光谱影像上所表现出的图像特征亦有所不同。本发明综合考虑各感病阶段图像表征出的多指标图谱特征,确定病害早期识别的敏感参数、指示性特征图谱,在此基础上分析细微变化的时序特征,以此确定最佳的病害早期识别时间点。利用无人机高光谱数据所呈现出的时间、空间及光谱分辨率优势,
在研究“时-空-谱”有效融合方法的基础上,通过图像分割、机器学习等技术手段,综合利用影像数据的时间,空间和光谱信息,实现松材线虫受害木的自动提取及定位,为及时有效的防治措施的提出和实施提供技术支撑。
[0204]
本发明提供的松材线虫病危害木的识别与定位的方法系统综合森林保护学、空间统计分析、图像处理等多学科的理论及技术优势,依据松材线虫的生命周期及其对寄主植被造成危害的机理,以无人机遥感技术为核心,在现有图谱特征识别及“空-谱”融合算法基础上,分析适用于松材线虫病病害识别的图像及光谱响应机制,优化现有分类及图像分割方式方法,构建病害识别的非接触式体系。充分利用固定样地及多年合作林场的实验条件,在传统野外病害程度的定性判定以及蒸腾速率、叶绿素含量等生理生化参数定量测定的基础上,同步利用无人机遥感技术及数学相关分析,利用参数反演、模型构建、相关性分析等技术,将定性的病害程度转化为定量的生理生化参数评价标准,将传统的野外调查与遥感定量反演相结合,从科学定量的角度指导病害防控。充分借鉴现有常用的松材线虫病害调查方法,从固定样地、单木及针叶三个尺度开展野外实地病害调查,结合针叶地面光谱及无人机高光谱数据,形成多源数据集,将机载高光谱数据应用于松材线虫病害的定点定时监测上;同时,在原有“空-谱”分类算法基础上探索病害监测的优化算法,加入时间序列分析,提出“时-空-谱”联合分类方法,扩宽高光谱影像分类技术支持森林灾害监测的应用范围。
[0205]
此外,本发明以松材线虫病为研究对象,针对松材线虫病特有的生物学特性,综合利用遥感、林学、森林保护学等多学科交叉的优势,通过无人机载高光谱数据和高清数码影像,结合地面调查数据,展开病害受害木的调查及识别研究,旨在寻求松材线虫病受害木早期识别及定位的非接触式高效手段,解决病害监测中定时、定位和定数据的关键问题。具有以下优势:
[0206]
(1)通过分析松材线虫病的病害特点,研究针对性的数据融合及空谱特征提取算法,提出满足小尺度无人机松材线虫病病害监测的数据获取及有效信息提取的方案。
[0207]
(2)以时间序列特征数据为基础,通过研究无人机遥感数据的“时-空-谱”融合算法及对应图谱特征,解决了松材线虫病早期病害识别的时间问题。
[0208]
(3)研究“空谱特征提取”及“空谱分类框架构建”方法,实现受害木的自动识别,解决病害早期识别的精确定位问题,进而为及时有效的灾害防控提供依据。
[0209]
本发明基于无人机高光谱的病害识别特征图谱构建、病害早期识别时间点确定,以及在“时-空-谱”融合算法基础上开展基于特征图谱提取以及空谱分类构建早期受害木自动定位系统,最终实现无人机成像高光谱数据在松材线虫病害识别上的有效应用。
[0210]
以下为与上述方法实施例对应的系统实施例,本实施方式可与上述实施方式互相配合实施。上述实施方式中提到的相关技术细节在本实施方式中依然有效,为了减少重复,这里不再赘述。相应地,本实施方式中提到的相关技术细节也可应用在上述实施方式中。
[0211]
本发明还提出了一种松材线虫病危害木的识别与定位的系统,其中所述方法包括:
[0212]
原始图像获取模块,用于通过空中高光谱成像传感器获取监测区域内植被的原始高光谱图像,所述监测区域内植被包括健康植被和多等级的危害木;
[0213]
预处理模块,用于为每株危害木的原始高光谱图像匹配对应的病害等级,得到具有病害等级的危害木图像;
[0214]
训练模块,用于以所述危害木图像为训练数据,训练特征图谱识别模型,并将训练完成的特征图谱识别模型作为病害识别特征图谱模型;
[0215]
多期原始高光谱图像获取模块,用于通过所述空中高光谱成像传感器定期获取所述监测区域内植被的原始高光谱图像,组成多期高光谱图像;
[0216]
病害识别特征图谱获取模块,用于将所述多期高光谱图像输入所述病害识别特征图谱模型,识别所述监测区域内各危害木的病害等级及其对应的病害识别特征图谱;
[0217]
时序特征确定模块,用于提取各病害识别特征图谱的时序特征,并对其进行时间序列预测分析,确定各危害木等级为病害早期的识别时间;
[0218]
特征图谱数据集确定模块,用于根据各病害等级对应的病害识别特征图谱,提取所述危害木识别时间对应的特征图谱数据,得到危害木早期识别时-空-谱特征图谱数据集;
[0219]
定位模块,用于对所述时-空-谱特征图谱数据集进行分类,以定位早期危害木。
[0220]
所述的松材线虫病危害木的识别与定位的系统,其中所述预处理模块用于:
[0221]
获取监测区域内所述不同等级的危害木位置;
[0222]
对各期所述不同等级的危害木的原始高光谱图像进行拼接、地形校正和光谱校正,得到高光谱预处理图像;
[0223]
根据所述不同等级的危害木定位,对所述高光谱预处理图像进行标注,得到基于时序的高光谱图像的像素标签数据集;
[0224]
从所述基于时序的高光谱图像的像素标签数据集中提取不同等级危害木的单木冠幅图像数据;
[0225]
将所述不同等级危害木的单木冠幅图像数据作为表征不同病害等级的危害木图像。
[0226]
所述的松材线虫病危害木的识别与定位的系统,其中所述训练模块用于:
[0227]
测定不同等级的危害木的生理生化参数,所述生理生化参数包括色素含量、含水量、蒸腾速率和光合指数等;
[0228]
根据所述表征不同病害等级的危害木图像,分析所述不同等级的危害木的生理生化参数,确定表征不同病害等级的危害木最佳量化参数;
[0229]
提取所述原始高光谱图像的区域平均光谱;
[0230]
根据所述表征不同病害等级的危害木最佳量化参数,筛选所述区域平均光谱的敏感波段,得到敏感波段的单波段图像数据;
[0231]
根据所述单波段图像数据,确定植物病害的光谱指数;
[0232]
根据不同病害等级的所述单波段图像,确定图像几何信息;
[0233]
根据所述表征病害等级的生理生化参数分析所述单波段图像、所述光谱指数和所述图像几何信息的相关性,得到不同病害等级的病害识别特征图谱;
[0234]
以所述表征不同病害等级的危害木图像为输入,以所述不同病害等级的病害识别特征图谱为输出,对所述特征图谱识别模型进行训练。
[0235]
所述的松材线虫病危害木的识别与定位的系统,其中所述步骤8包括:
[0236]
采用最优分类算法提取所述危害木早期识别时-空-谱特征图谱数据集的时-谱特征和空-谱特征;根据所述时-谱特征和所述空-谱特征,得到早期危害木的定位。
[0237]
所述的松材线虫病危害木的识别与定位的系统,其中所述定位模块用于:
[0238]
通过最优分类算法对所述危害木早期识别时-空-谱特征图谱数据集基于光谱进行分类,得到逐像素光谱分类后的待定位图像;对所述逐像素光谱分类后的待定位图像进行图像分割,得到早期危害木的定位。
[0239]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0240]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1