一种欺骗攻击下的无线传感器网络分布式保概率估计方法
一、本发明涉及一种系统状态估计方法,特别是一种欺骗攻击下的无线传感器网络分布式保概率估计方法。
背景技术:
0、二、背景技术
1、目前,分布式状态估计最典型的仍然是卡尔曼滤波和h∞方法。然而,卡尔曼滤波的性能很大程度上取决于噪声是否符合高斯假设,h∞方法也仅适用于能量有界扰动。而在许多实际工程场景中,高斯假设和能量有界的假设都不能充分反映真实的噪声特性,这就使得现有的技术在应用中收到了很大限制。此外,对于欺骗攻击的形式,大多假设虚假信号是已知的且为线性的,而这种假设在实际工程应用场景中往往是不合实际的,因此现有的方法不能很好地应对真实网络攻击。同时,工程实际中,保概率设计原则具有高灵活性等优势,在各种工程领域中都得到了广泛的应用。
技术实现思路
0、三、
技术实现要素:
1、针对上述问题,本发明的目的在于解决现有技术中受制于欺骗攻击形式的技术问题。
2、本技术提供一种欺骗攻击下的无线传感器网络分布式保概率估计方法,具体步骤为:
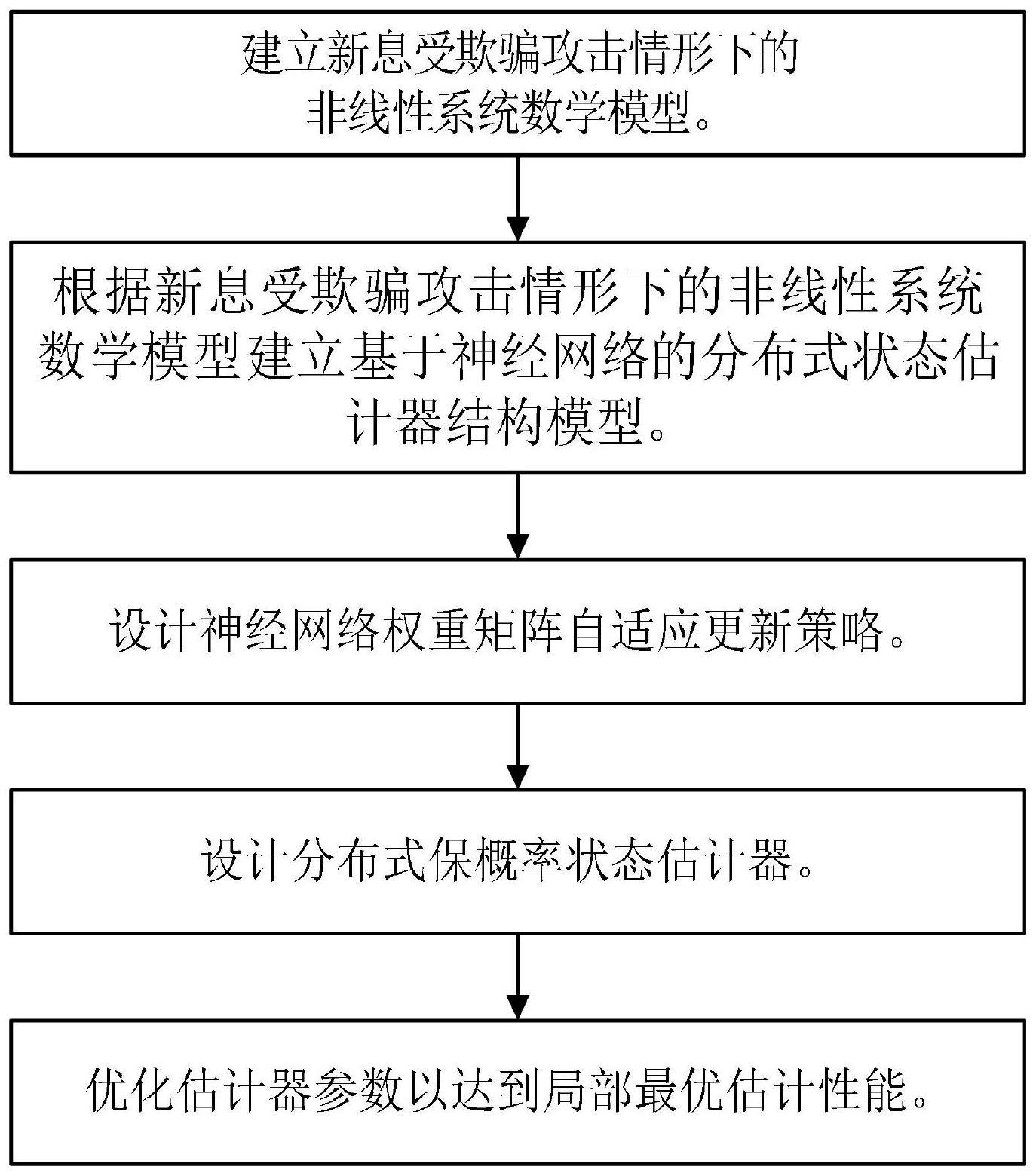
3、步骤1、建立新息受欺骗攻击情形下的非线性系统数学模型;
4、步骤2、根据新息受欺骗攻击情形下的非线性系统数学模型建立基于神经网络的分布式状态估计器结构模型;
5、步骤3、设计神经网络权重矩阵自适应更新策略;
6、步骤4、设计分布式保概率状态估计器增益;
7、步骤5、优化估计器参数以达到局部最优估计性能;
8、可选的,建立新息受欺骗攻击情形下的非线性系统数学模型,包括:
9、
10、其中,系统建立在时域[0,t]上,表示系统在当前时刻k的状态,表示系统在当前时刻k的测量输出;bk是已知的具有适当维数的实矩阵之一,ei,k是已知的具有适当维数的实矩阵之二;f(xk):是光滑的非线性函数之一,g(xk):是光滑的非线性函数之二;和分别是过程噪声和量测噪声,满足如下的约束集:
11、
12、其中,vk>0是具有适当维数的已知矩阵之一,uk>0是具有适当维数的已知矩阵之二;
13、利用泰勒级数展开方法,系统中的非线性项f(xk)和gi(xk)表示为
14、
15、其中,代表非线性函数f(xk)进行泰勒级数展开中忽略高阶项而导致的误差,代表非线性函数g(xk)进行泰勒级数展开中忽略高阶项而导致的误差,是已知的矩阵之一,是已知的矩阵之二,是未知的矩阵之一,是未知的矩阵之二,作为不确定性分别用于描述矩阵φi,k和ψi,k中的建模误差,满足||δ1i||≤1及||δ2i||≤1;φi,k和ψi,k由下式获得
16、
17、可选的,根据新息受欺骗攻击情形下的非线性系统数学模型建立基于神经网络的分布式状态估计器结构模型,包括:
18、
19、其中,是节点i的状态估计,zi,k是输出估计为时的新息;fi,k,gi,k和hij,k是估计器中的待设计的三个参数;为神经网络权重矩阵wij的估计值,wij为节点i为邻居节点的wj设置的理想权重矩阵;定义输出估计且新息是节点j发送的受欺骗攻击下的虚假新息,符号表示定义为,具体描述如下:
20、
21、其中,αk是服从伯努利分布的随机序列,用以描述网络攻击的发生与否,满足prob{·}代表事件发生的概率;是攻击者根据获取的新息zj,k生成的欺骗信号,以注入到原始新息中,该欺骗信号有如下形式:
22、
23、其中,χ(·):是一个定义在紧集上的未知非线性函数,下式为利用神经网络逼近未知非线性函数χ(zj,k)的具体方法:
24、χ(zj,k)=wjφ(zj,k)+δj,k (8)
25、其中,wj是神经网络的理想权重矩阵,φ(·)是激活函数,δj,k是估计误差,分别满足下列条件:
26、||wj||f≤∈1j,||φ(·)||≤∈2,||δj,k||≤∈3j (9)
27、其中,∈1j是已知的正标量之一,∈2是已知的正标量之二,∈3j是已知的正标量之三;
28、定义为对无线传感器网络观测对象状态的估计误差,为神经网络的更新误差,则初始条件和满足
29、
30、其中,qij,0是已知的正定实矩阵之一,p0是已知的正定实矩阵之二;
31、系统状态一步估计误差由下式获得
32、
33、中间定义:
34、
35、
36、
37、
38、
39、
40、
41、
42、
43、
44、一步估计误差根据中间定义,表示为:
45、
46、其中,当时有θij=0,则是一个稀疏矩阵,表示为
47、
48、其中此外,对于两个有适当维数的分块矩阵之一a=[aij]n×n和之二b=[bij]n×n,定义为
49、可选的,设计神经网络权重矩阵自适应更新策略,包括:
50、
51、其中,神经网络的代价函数定义为
52、
53、定义为
54、
55、为自整定标量参数之一,为自整定标量参数之二,设计参数和的具体方法为:
56、给定一矩阵序列{qij,k}k∈[0,t];如果存在正标量序列参数通过求解下列线性矩阵不等式获得:
57、
58、其中,mij,k是矩阵的因数分解,即若该线性矩阵不等式成立,那么下列不等式成立
59、
60、5.根据权利要求1所述的欺骗攻击下的无线传感器网络分布式保概率估计方法,其特征在于,设计分布式保概率状态估计器增益,包括:
61、1、定义在每个节点处的状态估计误差需要满足如下的概率p下的椭球约束:
62、
63、定义系统状态估计误差则该约束也可以等价地表示为
64、
65、其中,是预先指定的矩阵,p是一个预先指定的满足0<p<1的标量,是内的一个椭球,代表事件发生的概率,的定义如下:
66、
67、其中,代表椭球中心,y>0是一个适当维数的正定矩阵用以描绘椭球的形状。
68、建立状态估计误差以一个预先指定的概率收敛到一个允许的椭球区域内的充分条件:
69、给定估计器的三个增益矩阵fi,k,gi,k和hij,k,在神经网络的更新误差在加权frobenius范数意义上有界的充分条件成立的前提下,对于一正定矩阵序列{pk}k∈[0,t-1],有因式分解形式,如果存在非负定标量序列满足下列递归矩阵不等式:
70、
71、其中,
72、
73、
74、
75、
76、
77、
78、那么下列不等式成立:
79、
80、2、求解估计器增益参数的方法如下:
81、给定一个预先指定的0<p<1以及一系列正定矩阵如果存在一系列非负标量满足
82、
83、则估计器参数fi,k,gi,k和hij,k通过求解该线性矩阵不等式得出;
84、3、给出如下算法以迭代求得所需的估计器参数{fi,k,gi,k,hij,k}:
85、输入:拓扑信息xi的初值xi,0,wij的初值wij,0,的初值qij的初值qij,0,pk的初值p0;性能约束之一{qij,k}k>0,性能约束之二p;激活函数φ(·);其他参数:∈1i,∈2,∈3i,uk,vk;最大步长t;
86、i.令k=0;
87、ii.求解公式(27)获得估计器增益{fi,k,gi,k,hij,k};根据公式(5)获取一步估计值获取新息zi,k+1;求解公式(14)获得更新参数根据公式(13)获得令k=k+1;
88、iii.如果k<t,返回ii继续执行,否则退出。
89、可选的,优化估计器参数以达到局部最优估计性能,包括:
90、在获得的估计器参数集合中,分别从不同的性能需求出发提出下列三个优化问题,以寻求局部最优的估计器参数:
91、1、最小化矩阵qij,k的迹以保证神经网络权重矩阵估计值误差的加权frobenius范数最小,则可得推论1如下:
92、神经网络的更新误差在加权frobenius范数意义上有界的充分条件成立的前提下,当下列最小化问题有可行解时:
93、
94、subjectto (14)
95、能够达到矩阵序列{qij,k}k∈[0,t]的迹的最小值。
96、2、最小化矩阵的迹以保证受预先指定的固定概率约束下的最优估计性能;
97、为了简化表达,记则可得推论2如下:
98、给定概率p,在步骤3中所述的矩阵在加权frobenius范数意义上有界的充分条件成立的前提下,基于推论1,当下列最小化问题有可行解时:
99、
100、subjectto (19)
101、能够达到矩阵序列的迹的最小值;
102、3、最小化固定约束下的qk以确保每一时刻概率性能指标具有下界;
103、假设p是时变的,pk为在时刻k的概率性能指标,定义则有如下推论3:
104、给定概率p,神经网络的更新误差在加权frobenius范数意义上有界的充分条件成立的前提下,基于推论1,当下列最小化问题有可行解时:
105、
106、
107、能够确保pk有下界。
108、本发明所考虑的系统由非线性差分方程描述,该方程具有更强的通用性,且可以更全面、更真实地反映工程应用。其次,在每个时刻处为系统定义了一个新的瞬态性能指标,能够在有限的感兴趣的时间间隔内适当地描述系统动态。本技术,提出了一种概率设计方法,能够避免实际应用中不必要的严格约束条件产生的不利影响,并以令人满意的概率实现预期的性能,提供更多灵活性。最后,提供了一种联合估计算法,能够实现同时对系统状态和受攻击的新息进行估计。
109、下面结合说明书附图对本发明作进一步描述。
- 还没有人留言评论。精彩留言会获得点赞!