一种基于位置误差判断的正畸弓丝误差波动度评价方法
1.本发明专利涉及一种基于位置误差判断的正畸弓丝误差波动度评价方法,属于正畸弓丝弯制评价技术领域。
背景技术:
2.错颌畸形是危及人体健康的第三大口腔疾病,呈现较高的发病率,现代口腔医学中,固定矫治是一种常用且有效的正畸治疗手段,而正畸弓丝的弯制是固定矫治技术的关键,在传统临床应用中,正畸弓丝基本依赖于专业医师手工弯制,难以保证精度;近年来,深受数字化制造技术的影响,传统的口腔制造加工工艺正发生革命性变化,口腔正畸领域也受益于数字化技术,正畸矫治器中弓丝的加工正在向数字化发展。但是现阶段在正畸弓丝弯制完成后,仍然需要医师依据经验对正畸弓丝进行评价,判断是否满足使用要求,该方法严重依赖医师的临床经验,难以实现正畸弓丝的量化评价,且仅能实现对单个正畸弓丝曲线弯制的准确性评价,缺乏一种通过分析大量依据同一理论正畸弓丝曲线弯制出的实际正畸弓丝曲线的误差率数据进而实现对正畸弓丝弯制稳定性量化评价的方法。
3.此外,考虑到正畸弓丝曲线上弯制点弯制复杂度或正畸弓丝曲线上弯制点的归一化弯制点角距比的个性化特点,比如患者个性化正畸弓丝曲线上的弯制点存在弯制点复杂度较小,各弯制点的复杂度均不大于所设定的分界值,且患者个性化正畸弓丝曲线上弯制点的归一化弯制点角距比值较小,各弯制点的归一化弯制点角距比均不大于所设定的分界值,即该正畸弓丝曲线弯制点的复杂度和正畸弓丝曲线形状具有明显特征,在对此类正畸弓丝曲线进行弯制稳定性评价时,目前并没有一种方法能够通过指标确定此类正畸弓丝曲线的误差波动度,实现正畸弓丝曲线弯制稳定性的高效量化评价;此类方法的缺失导致医师和正畸弓丝机器人无法获得具有针对性的指导和改进方向,阻碍了医师弯制技术的进步,严重影响了临床矫治效果,阻碍了正畸弓丝机器人机械结构的优化限制了正畸弓丝弯制算法的迭代升级,制约了正畸弓丝弯制机器人的发展;综上,目前正畸弓丝弯制评价技术领域亟待一种能够精确量化评价此类具有特殊属性的正畸弓丝曲线弯制稳定性的方法。
技术实现要素:
4.针对上述问题,本发明提出了一种基于位置误差判断的正畸弓丝误差波动度评价方法,解决目前正畸弓丝评价领域中缺少针对弯制点复杂度较小且弯制点的归一化弯制点角距比较小的正畸弓丝曲线弯制稳定性的量化评价方法,在正畸弓丝评价过程中通过进行线误差波动度以及角误差波动度的验证,实现了对正畸弓丝曲线弯制稳定性的高效量化评价。
5.一种基于位置误差判断的正畸弓丝误差波动度评价方法,所述方法的具体实现过程为:
6.步骤一、理论正畸弓丝曲线数据及实际正畸弓丝曲线数据导入:
7.以右手定则建立o-xyz三维正畸弓丝误差标定坐标系w,以正畸医师根据患者牙列
形态设计的具有n个弯制点的理论正畸弓丝曲线,计算并输入理论正畸弓丝曲线弯制点信息集p
′
t
={
t
p
′1,
t
p
′2,
t
p
′3,...,
t
p
′i,...,
t
p
′n},
t
p
′i=(
t
α
′i,
t
β
′i,
t
γ
′i,td
′i)为理论正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,i的取值范围为1≤i≤n,
t
α
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,
t
β
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,
t
γ
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,
td′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;理论正畸弓丝曲线左端点为ps,理论正畸弓丝曲线右端点为pf,ps和pf之间连线的中点为
t
o',对理论正畸弓丝曲线进行空间变换:令点
t
o'与三维正畸弓丝误差标定坐标系w的原点o重合,理论正畸弓丝曲线左端点ps位于y轴负半轴,理论正畸弓丝曲线右端点pf位于y轴正半轴,且理论正畸弓丝曲线与x轴正半轴无交点,再令理论正畸弓丝曲线沿y轴正方向顺时针旋转,直至理论正畸弓丝曲线与x轴正半轴出现交点,将理论正畸弓丝曲线经空间变换后的位姿设定为在三维正畸弓丝误差标定坐标系w中的最终位姿,计算并输入处于最终位姿下的理论正畸弓丝曲线弯制点信息集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn},
t
pi=(
t
αi,
t
βi,
t
γi,
tdi
)为处于最终位姿下的理论正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,
t
αi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,
t
βi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,
t
γi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,
tdi
为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;
8.以根据理论正畸弓丝曲线弯制出的m条具有n个弯制点的实际正畸弓丝曲线,计算并输入实际正畸弓丝曲线信息集为第j条实际正畸弓丝曲线弯制点信息集,j的取值范围为1≤j≤m,为第j条实际正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;第j条实际正畸弓丝曲线左端点为jp
′s,第j条实际正畸弓丝曲线右端点为jp
′f,jp
′s和jp
′f之间连线的中点为对第j条实际正畸弓丝曲线进行空间变换:令点与三维正畸弓丝误差标定坐标系w的原点o重合,第j条实际弓丝曲线左端点jp
′s位于y轴负半轴,第j条实际正畸弓丝曲线右端点jp
′f位于y轴正半轴,且第j条实际正畸弓丝曲线与x轴正半轴无交点,再令第j条实际正畸弓丝曲线沿y轴正方向顺时针旋转,直至第j条实际正畸弓丝曲线与x轴正半轴出现交点,将第j条实际正畸
弓丝曲线经空间变换后的位姿设定为在三维正畸弓丝误差标定坐标系中的最终位姿,计算并输入m条处于最终位姿下的实际正畸弓丝曲线信息集为第j条处于最终位姿下的实际正畸弓丝曲线弯制点信息集,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;
9.步骤二、实际正畸弓丝曲线位置误差的设定:
10.定义实际正畸弓丝曲线弯制点的位置误差,弯制点位置误差是对正畸弓丝曲线弯制点弯制位置准确性的量化描述,实际正畸弓丝曲线弯制点位置误差的评价包括两部分,分别为实际正畸弓丝曲线弯制点线误差率评价和实际正畸弓丝曲线弯制点平均偏置误差率评价;规定实际正畸弓丝曲线弯制点的线误差率,用符号ed表示,线误差率ed是理论正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系原点o之间直线距离和与理论正畸弓丝曲线弯制点相对应的实际正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系原点o之间直线距离的误差的量化描述,规定第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点的线误差率表示为规定实际正畸弓丝曲线弯制点的平均偏置误差率,用符号ea表示,平均偏置误差率ea是理论正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系各坐标轴之间的夹角和与理论正畸弓丝曲线弯制点相对应的实际正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系各坐标轴之间夹角的平均误差的量化描述,规定第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点的平均偏置误差率表示为其中为理论正畸弓丝曲线第i个弯制点的角
t
αi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
βi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
γi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定
11.步骤三、理论正畸弓丝曲线弯制点复杂度的设定:
12.定义理论正畸弓丝曲线弯制点复杂度,用符号cr表示,cr是对理论正畸弓丝曲线弯制点的弯制难易程度的综合量化描述,理论正畸弓丝曲线弯制点的cr值越高,即该弯制点在弯制时越困难,规定理论正畸弓丝曲线第i个弯制点的复杂度表示为表示理论正畸弓丝曲线第i个弯制点的归一化弯制点角距比,规定
tei
表示理论正畸弓丝曲线第i个弯制点的弯制点角距比,弯制点角距比是对单个弯制点的弯制复杂程度的量化描述,规定
t
θi为作用在理论正畸弓丝曲线弯制点
t
pi处的弯制角度,表示作用在理论正畸弓丝曲线第i个弯制点处的弯制距离,即理论正畸弓丝曲线弯制点
t
p
i-1
与
t
pi之间的曲线段的长度,对于理论正畸弓丝曲线第1个弯制点
t
p1,表示弯制点
t
p1到理论正畸弓丝曲线左端点ps之间的曲线段长度,
temin
为理论正畸弓丝曲线弯制点角距比的最小值,
temax
为理论正畸弓丝曲线弯制点角距比的最大值;规定的分界值为(
te*
)b;表示理论正畸弓丝曲线第i个弯制点的归一化弯制点密度,规定
t
ρi表示理论正畸弓丝曲线第i个弯制点的弯制点密度,弯制点密度是对正畸弓丝曲线上单个弯制点与相邻弯制点间紧密程度的量化描述,规定公式中的数值1表示为1个弯制点,
t
li表示理论正畸弓丝曲线第i个弯制点与其距离最近的弯制点之间的直线距离,即表示理论正畸弓丝曲线第i-1个弯制点与理论正畸弓丝曲线第i个弯制点之间的距离,表示理论正畸弓丝曲线第i个弯制点与理论正畸弓丝曲线第i+1个弯制点之间的距离,当i=1时,规定表示理论正畸弓丝曲线第1个弯制点与理论正畸弓丝曲线左端点ps之间的直线距离,表示理论正畸弓丝曲线第1个弯制点与理论正畸弓丝曲线第2个弯制点之间的直线距离,当i=n时,规定时,规定表示理论正畸弓丝曲线第n-1个弯制点与理论正畸弓丝曲线第n个弯制点之间的直线距离,表示理论正畸弓丝曲线第n个弯制点与理论正畸弓丝曲线右端点pf之间的直线距离,
t
ρ
min
为理论正畸弓丝曲线弯制点角距比的最小值,
t
ρ
max
为理论正畸弓丝曲线弯制点角距比的最大值;复杂度公式中的数值2表示在计算复杂度时考虑了归一化弯制点角距比和归一化弯制单密度两个参数;规定理论正畸弓丝曲线弯制点的复杂度cr的分界值为c
rb
;
13.步骤四、实际正畸弓丝曲线线误差波动度、角误差波动度的设定:
14.定义实际正畸弓丝曲线的线误差波动度,用符号σd表示,σd是对实际正畸弓丝曲线弯制距离稳定性的量化描述,规定实际正畸弓丝曲线第i个弯制点的线误差波动度表示为
表示第j条实际正畸弓丝曲线第i个弯制点的线误差率,规定表示m条实际正畸弓丝曲线的第i个弯制点的线误差率的平均值,规定m条实际正畸弓丝曲线第i个弯制点的线误差波动度的上限值为(σd)
max
;定义实际正畸弓丝曲线的角误差波动度,用符号σa表示,σa是对实际正畸弓丝曲线弯制角度稳定性的量化描述,规定实际正畸弓丝曲线第i个弯制点的角误差波动度表示为表示第j条实际正畸弓丝曲线第i个弯制点的角误差率,规定其中为理论正畸弓丝曲线第i个弯制点的角
t
αi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
βi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
γi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定表示m条实际正畸弓丝曲线的第i个弯制点的角误差率的平均值,规定m条实际正畸弓丝曲线第i个弯制点的角误差波动度的上限值为(σa)
max
;
15.步骤五、理论正畸弓丝曲线弯制点复杂度及归一化弯制点角距比验证:
16.按照公式计算理论正畸弓丝曲线上第i个弯制点的复杂度,即1cr表示理论正畸弓丝曲线上第1个弯制点
t
p1的复杂度,i的初始值为i=1,通过比较取出
icr
中的最大值(
icr
)
max
,对条件(
icr
)
max
≤c
rb
进行验证;按照公式计算理论正畸弓丝曲线上第i个弯制点的归一化弯制点角距比,即表示理论正畸弓丝曲线上第1个弯制点
t
p1的归一化弯制点角距比,通过比较取出中的最大值对条件进行验证,具体为:
17.a)理论正畸弓丝曲线弯制点复杂度验证;
18.如果(
icr
)
max
≤c
rb
成立,说明处于最终位姿下的理论正畸弓丝曲线弯制点信息集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn}内的最大弯制点复杂度仍不大于所设定的复杂度分界值c
rb
,可知在所取的包含n个弯制点的理论正畸弓丝曲线上每个弯制点的复杂度都不大于弯制点复杂度的分界值c
rb
,则此类正畸弓丝曲线复杂度较小,但仍存在理论正畸弓丝曲线弯制点归一化弯制点角距比较小,而归一化弯制点密度较大这一情况,而归一化弯制点角距比包含实际正畸弓丝曲线的形状特征,因此对理论正畸弓丝曲线归一化弯制点角距比进行验证,跳转至步骤五b);
19.如果(
icr
)
max
≤c
rb
不成立,说明该此类理论正畸弓丝曲线弯制点的复杂度不小,该评价方法不适用于此正畸弓丝曲线,则输出该评价方法不适用于此正畸弓丝曲线,正畸弓丝误差波动度评价结束;
20.b)理论正畸弓丝曲线归一化弯制点角距比验证;
21.如果成立,说明处于最终位姿下的理论正畸弓丝曲线弯制点信息集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn}内弯制点的最大归一化弯制点角距比仍不大于所设定的归一化弯制点分界值(
te*
)b,可知在所取的包含n个弯制点的理论正畸弓丝曲线上每个弯制点的归一化弯制点角距比都不大于归一化弯制点的上限值(
te*
)
max
,则此类正畸弓丝曲线的形状简单,在评价依据此类具有此类特征的理论正畸弓丝曲线而弯制的实际正畸弓丝曲线的误差波动度时,仅需要评价实际正畸弓丝曲线弯制点的位置误差波动度,即实际正畸弓丝曲线弯制点线误差波动度和实际正畸弓丝曲线弯制点角误差波动度,跳转至步骤六;
22.如果不成立,说明此类理论正畸弓丝曲线弯制点的复杂度或归一化弯制点角距比过大,该评价方法不适用于此正畸弓丝曲线,则输出该评价方法不适用于此正畸弓丝曲线,正畸弓丝误差波动度评价结束;
23.步骤六、实际正畸弓丝曲线线误差波动度和实际正畸弓丝曲线角误差波动度评价:
24.根据iσd和iσa的计算公式计算m条实际正畸弓丝曲线第i个弯制点的线误差波动度和角误差波动度,i的初始值为i=1;
25.a)实际正畸弓丝曲线线误差波动度评价
26.根据公式计算m条实际正畸弓丝曲线第i个弯制点的线误差波动度,判断iσd≤(σd)
max
是否成立,
27.具体为:
28.如果iσd≤(σd)
max
成立,说明m条实际正畸弓丝曲线第i个弯制点的线误差波动度在允许范围内,则跳转至步骤六b);
29.如果iσd≤(σd)
max
不成立,说明m条实际正畸弓丝曲线第i个弯制点的线误差波动度超出允许范围,则输出实际正畸弓丝曲线第i个弯制点的线误差波动度超出许可范围,正畸弓丝评价结束;
30.b)实际正畸弓丝曲线角误差波动度评价
31.根据公式计算m条实际正畸弓丝曲线第i个弯制点的角误差波动度,判断iσa≤(σa)
max
是否成立,
32.具体为:
33.如果iσa≤(σa)
max
成立,说明m条实际正畸弓丝曲线第i个弯制点的角误差波动度在允许范围内,则跳转至步骤七;
34.如果iσa≤(σa)
max
不成立,说明m条实际正畸弓丝曲线第i个弯制点的角误差波动度超出允许范围,则输出实际正畸弓丝曲线第i个弯制点的角误差波动度超出许可范围,正畸弓丝评价结束;
35.步骤七、判断m条实际正畸弓丝曲线弯制点是否评价完毕:
36.判断i与实际正畸弓丝曲线弯制点的个数n是否相等,
37.具体为:
38.如果i=n不成立,说明未对m条实际正畸弓丝曲线上所有弯制点进行评价,则令i=i+1,即表示对下一组实际正畸弓丝曲线弯制点进行评价,跳转至步骤六a);
39.如果i=n成立,说明已对m条实际正畸弓丝曲线上所有弯制点进行评价,且所有实际正畸弓丝曲线弯制点的线误差波动度、角误差波动度和曲率误差波动度均在允许范围内,正畸弓丝评价结束。
40.本发明的有益效果为:
41.1、本发明针对正畸弓丝评价方法,提出了以弯制点复杂度或以弯制点的归一化弯制点角距比为正畸弓丝曲线评价的预先判断参数,设定正畸弓丝曲线弯制点复杂度的分界值为c
rb
,正畸弓丝曲线弯制点的归一化弯制点角距比的分界值为(
te*
)b,在正畸弓丝曲线评价前预先验证正畸弓丝曲线上弯制点的最大复杂度仍不大于弯制点复杂度的分界值c
rb
且正畸弓丝曲线上弯制点的归一化弯制点角距比的最大值仍不大于归一化弯制点角距比的分界值(
te*
)b,可得出正畸弓丝曲线上弯制点的复杂度icr或正畸弓丝曲线弯制点的归一化弯制点角距比
tei
都符合要求,从而为本方法提供了前提条件的约束,确定了正畸弓丝曲线上弯制点的复杂度或归一化弯制点角距比特征,避免了在对正畸弓丝曲线评价前需要对每个正畸弓丝曲线弯制点的复杂或归一化弯制点进行计算分类并应用不同评价方案的繁琐步骤,提高了评价效率。
42.2、本发明针对一类具有弯制点复杂度较小且归一化弯制点角距比较小这种特殊属性的正畸弓丝曲线,提出了正畸弓丝曲线弯制点的位置误差的概念;考虑到对于弯制点复杂度和归一化弯制点角距比均较小的正畸弓丝曲线,形状较为简单,在进行正畸弓丝曲线形状弯制的过程中不易产生误差,因此本发明无需对实际正畸弓丝曲线的形状弯制的稳定性进行评价,仅需对正畸弓丝曲线的线误差波动度和角误差波动度进行评价首先对正畸弓丝曲线弯制点的曲率误差波动度进行评价,完成对正畸弓丝曲线弯制点位置弯制稳定性的量化评估,在满足评级要求的前提下,简化了评价过程;
43.4、同本发明人同日申报的发明专利《一种基于曲率误差预先判断的正畸弓丝误差波动度评价方法》相比,虽然两种方法都适用于具有特殊属性的一类个性化实际正畸弓丝曲线,但对于《一种基于曲率误差预先判断的正畸弓丝误差波动度评价方法》中所提及的方
法所侧重的前提是每个实际正畸弓丝曲线弯制点的复杂度均大于弯制点复杂度分界值或归一化弯制点角距比大于归一化弯制点角距比分界值,进而预先判断实际正畸弓丝曲线弯制点的曲率误差波动度,并通过评价标定值对正在进行的评价进行标定,在实际正畸弓丝曲线所有弯制点的曲率误差波动度均满足要求后,再进行实际正畸弓丝曲线弯制点的线误差波动度和角误差波动度的评价;本方法所侧重的前提是每个实际正畸弓丝曲线弯制点的复杂度和归一化弯制点角距比均小于相应设定的分界值,进而仅验证实际正畸弓丝曲线弯制点的线误差波动度和角误差波动度,且无需标定值进行标定;两种方法在进行实际正畸弓丝曲线评价时应用的情况不同,因此本方法的提出与另种方法相互补偿,进而完善了实际正畸弓丝曲线评价的系列方法。
44.5、同本发明人同日申报的发明专利《一种基于弯制点复杂度判断的正畸弓丝误差波动度评价方法》相比,该方法以一类个性化正畸弓丝曲线上的弯制点具有复杂度和归一化弯制点角距比均较小的特殊属性为前提,不再对正畸弓丝曲线上每个弯制点进行复杂度和归一化弯制点角距比判断进而确定是否需要对弯制点进行加权曲率误差率评价,不仅满足了实际正畸弓丝曲线的误差波动度评价,而且使得正畸弓丝评价算法的复杂程度降低,提高了评价效率。
附图说明
45.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
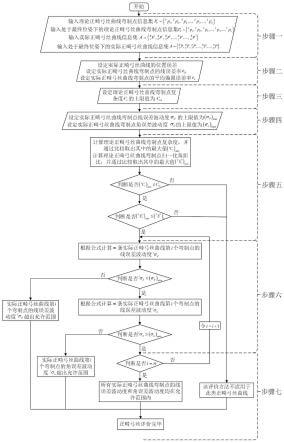
46.图1为一种基于位置误差判断的正畸弓丝误差波动度评价方法流程图;
47.图2为理论正畸弓丝曲线在空间变换前的位置示意图;
48.图3为m条实际正畸弓丝曲线在空间变换前的位置示意图;
49.图4为第7个实际正畸弓丝曲线弯制点角误差波动度大于上限值的m条处于最终位姿下的实际正畸弓丝曲线示意图;
50.图5为m条处于最终位姿下的弯制点误差波动度均在允许范围内的实际正畸弓丝曲线示意图;
具体实施方式
51.为使本发明专利的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明专利,但是应该理解,这些描述只是示例性的,而并非要限制本发明专利的范围,此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明专利的概念。
52.实施实例1:如图1、图2、图3、图4、图5所示,本具体实施方式采用以下技术方案:一种基于位置误差判断的正畸弓丝误差波动度评价方法,所述方法的具体实现过程为:
53.步骤一、理论正畸弓丝曲线数据及实际正畸弓丝曲线数据导入:
54.以右手定则建立o-xyz三维正畸弓丝误差标定坐标系w,以正畸医师根据患者牙列形态设计的具有n个弯制点的理论正畸弓丝曲线,计算并输入理论正畸弓丝曲线弯制点信息集p
′
t
={
t
p
′1,
t
p
′2,
t
p
′3,...,
t
p
′i,...,
t
p
′n},
t
p
′i=(
t
α
′i,
t
β
′i,
t
γ
′i,
td′i)为理论正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,i的取值范围为1≤i≤n,
t
α
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间
的连线与x轴所成的夹角,
t
β
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,
t
γ
′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,
td′i为理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;理论正畸弓丝曲线左端点为ps,理论正畸弓丝曲线右端点为pf,ps和pf之间连线的中点为
t
o',对理论正畸弓丝曲线进行空间变换:令点
t
o'与三维正畸弓丝误差标定坐标系w的原点o重合,理论正畸弓丝曲线左端点ps位于y轴负半轴,理论正畸弓丝曲线右端点pf位于y轴正半轴,且理论正畸弓丝曲线与x轴正半轴无交点,再令理论正畸弓丝曲线沿y轴正方向顺时针旋转,直至理论正畸弓丝曲线与x轴正半轴出现交点,将理论正畸弓丝曲线经空间变换后的位姿设定为在三维正畸弓丝误差标定坐标系w中的最终位姿,计算并输入处于最终位姿下的理论正畸弓丝曲线弯制点信息集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn},
t
pi=(
t
αi,
t
βi,
t
γi,
tdi
)为处于最终位姿下的理论正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,
t
αi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,
t
βi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,
t
γi为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,
tdi
为处于最终位姿下的理论正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;
55.以根据理论正畸弓丝曲线弯制出的m条具有n个弯制点的实际正畸弓丝曲线,计算并输入实际正畸弓丝曲线信息集为第j条实际正畸弓丝曲线弯制点信息集,j的取值范围为1≤j≤m,为第j条实际正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,为第j条实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;第j条实际正畸弓丝曲线左端点为jp's,第j条实际正畸弓丝曲线右端点为jp'f,jp's和jp'f之间连线的中点为对第j条实际正畸弓丝曲线进行空间变换:令点与三维正畸弓丝误差标定坐标系w的原点o重合,第j条实际弓丝曲线左端点jp's位于y轴负半轴,第j条实际正畸弓丝曲线右端点jp'f位于y轴正半轴,且第j条实际正畸弓丝曲线与x轴正半轴无交点,再令第j条实际正畸弓丝曲线沿y轴正方向顺时针旋转,直至第j条实际正畸弓丝曲线与x轴正半轴出现交点,将第j条实际正畸弓丝曲线经空间变换后的位姿设定为在三维正畸弓丝误差标定坐标系中的最终位姿,计算并输入m条处于最终位姿下的实际正畸弓丝曲线信息集为第j条处于最终位姿下的实际正
畸弓丝曲线弯制点信息集,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点相对于三维正畸弓丝误差标定坐标系w的位姿信息,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与x轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与y轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间的连线与z轴所成的夹角,为第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点和三维正畸弓丝误差标定坐标系w的原点o之间连线的长度;
56.步骤二、实际正畸弓丝曲线弯制点位置误差的设定:
57.定义实际正畸弓丝曲线弯制点的位置误差,弯制点位置误差是对正畸弓丝曲线弯制点弯制位置准确性的量化描述,实际正畸弓丝曲线弯制点位置误差的评价包括两部分,分别为实际正畸弓丝曲线弯制点线误差率评价和实际正畸弓丝曲线弯制点平均偏置误差率评价;规定实际正畸弓丝曲线弯制点的线误差率,用符号ed表示,线误差率ed是理论正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系原点o之间直线距离和与理论正畸弓丝曲线弯制点相对应的实际正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系原点o之间直线距离的误差的量化描述,规定第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点的线误差率表示为规定实际正畸弓丝曲线弯制点的平均偏置误差率,用符号ea表示,平均偏置误差率ea是理论正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系各坐标轴之间的夹角和与理论正畸弓丝曲线弯制点相对应的实际正畸弓丝曲线弯制点与三维正畸弓丝误差标定坐标系各坐标轴之间夹角的平均误差的量化描述,规定第j条处于最终位姿下的实际正畸弓丝曲线第i个弯制点的平均偏置误差率表示为其中为理论正畸弓丝曲线第i个弯制点的角
t
αi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
βi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定为理论正畸弓丝曲线第i个弯制点的角
t
γi与第j条实际正畸弓丝曲线第i个弯制点的角之间的误差率,规定
58.步骤三、理论正畸弓丝曲线弯制点复杂度的设定:
59.定义理论正畸弓丝曲线弯制点复杂度,用符号cr表示,cr是对理论正畸弓丝曲线弯制点的弯制难易程度的综合量化描述,规定理论正畸弓丝曲线第i个弯制点的复杂度表示
为表示理论正畸弓丝曲线第i个弯制点的归一化弯制点角距比,规定
tei
表示理论正畸弓丝曲线第i个弯制点的弯制点角距比,弯制点角距比是对正畸弓丝曲线上单个弯制点的弯制复杂程度的量化描述,规定
t
θi为作用在理论正畸弓丝曲线弯制点
t
pi处的弯制角度,表示作用在理论正畸弓丝曲线第i个弯制点处的弯制距离,即理论正畸弓丝曲线弯制点
t
p
i-1
与
t
pi之间的曲线段的长度,对于理论正畸弓丝曲线第1个弯制点
t
p1,表示弯制点
t
p1到理论正畸弓丝曲线左端点ps之间的曲线段长度,
temin
为理论正畸弓丝曲线弯制点角距比的最小值,
temax
为理论正畸弓丝曲线弯制点角距比的最大值;规定的分界值为(
te*
)b;表示理论正畸弓丝曲线第i个弯制点的归一化弯制点密度,规定
t
ρi表示理论正畸弓丝曲线第i个弯制点的弯制点密度,弯制点密度是对正畸弓丝曲线上单个弯制点与相邻弯制点间紧密程度的量化描述,规定公式中的数值1表示为1个弯制点,
t
li表示理论正畸弓丝曲线第i个弯制点与其距离最近的弯制点之间的直线距离,即表示理论正畸弓丝曲线第i-1个弯制点与理论正畸弓丝曲线第i个弯制点之间的直线距离,表示理论正畸弓丝曲线第i个弯制点与理论正畸弓丝曲线第i+1个弯制点之间的直线距离,当i=1时,规定表示理论正畸弓丝曲线第1个弯制点与理论正畸弓丝曲线左端点ps之间的直线距离,表示理论正畸弓丝曲线第1个弯制点与理论正畸弓丝曲线第2个弯制点之间的直线距离,当i=n时,规定表示理论正畸弓丝曲线第n-1个弯制点与理论正畸弓丝曲线第n个弯制点之间的直线距离,表示理论正畸弓丝曲线第n个弯制点与理论正畸弓丝曲线右端点pf之间的直线距离,
t
ρ
min
为理论正畸弓丝曲线弯制点密度的最小值,
t
ρ
max
为理论正畸弓丝曲线弯制点密度的最大值;复杂度公式中的数值2表示在计算理论正畸弓丝弯制点复杂度时考虑了归一化弯制点角距比和归一化弯制单密度两个参数;规定理论正畸弓丝曲线弯制点的复杂度cr的分界值为c
rb
;
60.步骤四、实际正畸弓丝曲线弯制点线误差波动度、角误差波动度的设定:
61.定义实际正畸弓丝曲线弯制点的线误差波动度,用符号σd表示,σd是对实际正畸弓丝曲线弯制点弯制距离稳定性的量化描述,规定实际正畸弓丝曲线第i个弯制点的线误差
波动度表示为表示第j条实际正畸弓丝曲线第i个弯制点的线误差率,表示m条实际正畸弓丝曲线的第i个弯制点的线误差率的平均值,规定m条实际正畸弓丝曲线第i个弯制点的线误差波动度的上限值为(σd)
max
;定义实际正畸弓丝曲线弯制点的角误差波动度,用符号σa表示,σa是对实际正畸弓丝曲线弯制点弯制角度稳定性的量化描述,规定实际正畸弓丝曲线第i个弯制点的角误差波动度表示为其中表示m条实际正畸弓丝曲线的第i个弯制点的角误差率的平均值,规定m条实际正畸弓丝曲线第i个弯制点的角误差波动度的上限值为(σa)
max
;
62.步骤五、理论正畸弓丝曲线弯制点复杂度及归一化弯制点角距比验证:
63.按照公式计算理论正畸弓丝曲线上第i个弯制点的复杂度,即1cr表示理论正畸弓丝曲线上第1个弯制点
t
p1的复杂度,i的初始值为i=1,通过比较取出
icr
中的最大值(
icr
)
max
,对条件(
icr
)
max
≤c
rb
进行验证;按照公式计算理论正畸弓丝曲线上第i个弯制点的归一化弯制点角距比,即表示理论正畸弓丝曲线上第1个弯制点
t
p1的归一化弯制点角距比,通过比较取出中的最大值对条件进行验证,具体为:
64.a)理论正畸弓丝曲线弯制点复杂度验证;
65.如果(
icr
)
max
≤c
rb
成立,说明处于最终位姿下的理论正畸弓丝曲线弯制点信息集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn}内的最大弯制点复杂度仍不大于所设定的复杂度分界值c
rb
,可知在所取的包含n个弯制点的理论正畸弓丝曲线上每个弯制点的复杂度都不大于弯制点复杂度的分界值c
rb
,但仍存在理论正畸弓丝曲线弯制点归一化弯制点角距比较小,而归一化弯制点密度较大这一情况,因此对理论正畸弓丝曲线归一化弯制点角距比进行验证,跳转至步骤五b);
66.如果(
icr
)
max
≤c
rb
不成立,说明该此类理论正畸弓丝曲线弯制点的复杂度较大,该评价方法不适用于此正畸弓丝曲线,则输出该评价方法不适用于此正畸弓丝曲线,正畸弓丝误差波动度评价结束;
67.b)理论正畸弓丝曲线归一化弯制点角距比验证;
68.如果成立,说明处于最终位姿下的理论正畸弓丝曲线弯制点信息
集p
t
={
t
p1,
t
p2,
t
p3,...,
t
pi,...,
t
pn}内弯制点的最大归一化弯制点角距比仍不大于所设定的归一化弯制点分界值(
te*
)b,可知在所取的包含n个弯制点的理论正畸弓丝曲线上每个弯制点的归一化弯制点角距比都不大于归一化弯制点的上限值(
te*
)
max
,跳转至步骤六;
69.如果不成立,说明此类理论正畸弓丝曲线弯制点的复杂度或归一化弯制点角距比较大,该评价方法不适用于此正畸弓丝曲线,则输出该评价方法不适用于此正畸弓丝曲线,正畸弓丝误差波动度评价结束;
70.步骤六、实际正畸弓丝曲线弯制点线误差波动度和实际正畸弓丝曲线角误差波动度评价:
71.根据iσd和iσa的计算公式计算m条实际正畸弓丝曲线第i个弯制点的线误差波动度和角误差波动度,i的初始值为i=1;
72.a)实际正畸弓丝曲线弯制点线误差波动度评价
73.根据公式计算m条实际正畸弓丝曲线第i个弯制点的线误差波动度,判断iσd≤(σd)
max
是否成立,
74.具体为:
75.如果iσd≤(σd)
max
成立,说明m条实际正畸弓丝曲线第i个弯制点的线误差波动度在允许范围内,则跳转至步骤六b);
76.如果iσd≤(σd)
max
不成立,说明m条实际正畸弓丝曲线第i个弯制点的线误差波动度超出允许范围,则输出实际正畸弓丝曲线第i个弯制点的线误差波动度超出允许范围,正畸弓丝评价结束;
77.b)实际正畸弓丝曲线弯制点角误差波动度评价
78.根据公式计算m条实际正畸弓丝曲线第i个弯制点的角误差波动度,判断iσa≤(σa)
max
是否成立,
79.具体为:
80.如果iσa≤(σa)
max
成立,说明m条实际正畸弓丝曲线第i个弯制点的角误差波动度在允许范围内,则跳转至步骤七;
81.如果iσa≤(σa)
max
不成立,说明m条实际正畸弓丝曲线第i个弯制点的角误差波动度超出允许范围,则输出实际正畸弓丝曲线第i个弯制点的角误差波动度超出允许范围,正畸弓丝评价结束;
82.步骤七、判断m条实际正畸弓丝曲线弯制点是否评价完毕:
83.判断i与实际正畸弓丝曲线弯制点的个数n是否相等,
84.具体为:
85.如果i=n不成立,说明未对m条实际正畸弓丝曲线上所有弯制点进行评价,则令i=i+1,即表示对下一组实际正畸弓丝曲线弯制点进行评价,跳转至步骤六a);
86.如果i=n成立,说明已对m条实际正畸弓丝曲线上所有弯制点进行评价,且所有实
际正畸弓丝曲线弯制点的线误差波动度和角误差波动度均在允许范围内,正畸弓丝评价结束。
87.实施实例2:如图4所示,在m=20条包含n=16弯制点的实际正畸弓丝曲线上进行基于位置误差判断的正畸弓丝误差波动度评价过程中,i的初始值为i=1,设定弯制点复杂度的分界值为c
rb
=0.5,归一化弯制点角距比的分界值(
te*
)b=0.4,根据步骤三中计算理论正畸弓丝弯制点复杂度的公式计算16个理论正畸弓丝曲线弯制点的复杂度,从中取出最大值为(9cr)
max
=9cr=0.46,通过比较得出(9cr)
max
<c
rb
,计算理论正畸弓丝弯制点复杂度的公式计算16个理论正畸弓丝曲线弯制点的归一化弯制点角距比,从中取出最大值为通过比较得出设定弯制点线误差波动度的上限值(σd)
max
=0.06,弯制点角误差波动度的上限值(σa)
max
=0.09,则跳转至步骤六进行实际正畸弓丝曲线弯制点线误差波动度和角误差波动度评价,i的初始值为i=1,在步骤六a)中,根据iσd的计算公式得出1σd=0.03<(σd)
max
,跳转至步骤六b),根据iσa的计算公式得出1σa=0.04<(σa)
max
,跳转至步骤七,根据判断此时1=16不成立,则令i=i+1并跳转至六a)进行后续弯制点的线误差波动度和角误差波动度评价,根据此步骤,计算得出20条实际正畸弓丝曲线的第2、第3、第4、第5、第6个弯制点的线误差波动度和角误差波动度均小于相应的上限值,在进行20条实际正畸弓丝曲线的第7个弯制点线误差波动度计算时,得出7σd=0.1>(σd)
max
,则输出实际正畸弓丝曲线第7个弯制点的线误差波动度超出允许范围,不再对后续实际正畸弓丝曲线弯制点进行评价,正畸弓丝评价结束。
88.实施实例3:如图5所示,在m=20条包含n=16弯制点的实际正畸弓丝曲线上进行基于位置误差判断的正畸弓丝误差波动度评价过程中,i的初始值为i=1,设定弯制点复杂度的分界值为c
rb
=0.5,归一化弯制点角距比的分界值(
te*
)b=0.4,根据步骤三中计算理论正畸弓丝弯制点复杂度的公式计算16个理论正畸弓丝曲线弯制点的复杂度,从中取出最大值为(8cr)
max
=8cr=0.39,通过比较得出(8cr)
max
<c
rb
,计算16个理论正畸弓丝曲线弯制点的归一化弯制点角距比,从中取出最大值为通过比较得出设定弯制点线误差波动度的上限值(σd)
max
=0.06,弯制点角误差波动度的上限值(σa)
max
=0.09,则跳转至步骤六进行实际正畸弓丝曲线弯制点线误差波动度和角误差波动度评价,i的初始值为i=1,在步骤六a)中,根据iσd的计算公式得出1σd=0.05<(σd)
max
,跳转至步骤六b),根据iσa的计算公式得出1σa=0.06<(σa)
max
,跳转至步骤七,根据判断此时1=16不成立,则令i=i+1并跳转至六a)进行后续弯制点的线误差波动度和角误差波动度评价,根据此步骤,计算得出20条实际正畸弓丝曲线的第2、第3、第4、第5、第6、第7、第8、第9、第10、第11、第12、第13、第14、第15、第16个弯制点的线误差波动度和角误差波动度均小于相应的上限值,则输出所有实际正畸弓丝曲线弯制点的线误差波动度和角误差波动度均在允许范围内,正畸弓丝评价结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1