一种基于生成对抗网络的施工场地自动布置方法
1.本发明属于建筑领域,更具体地,涉及一种基于生成对抗网络的施工场地自动布置方法。
背景技术:
2.施工现场的管理与文明施工是安全生产的主要部分,是现代施工的一个重要的标志,也是未来实现智能化工地愿景的必然要求。制定合理全面的施工现场平面布置图,这对提高作业效率,保障工程安全和质量有着深远的意义。
3.目前已有的施工现场场地布置手段,是在参照并遵守国家与各地地方规定的基础上,凭借经验和直观感受,对施工现场进行布置和划分。这样的场地布置方案虽然能够满足工程对安全的最低要求,但也存在几个显著的问题——首先,凭借经验制定方案的方法难以在事前考虑到项目可能面对的所有状况,并不全面;其次,以最低的安全要求为准则制定的方案,在执行时难以保证其合理性,工程建设的效率不高;最后,这样制定出来的方案随机性太高,且受限于工程师的个人经历与经验,在具有较大风险的同时也对工程师的专业水平提出了较高的要求,耗费时间和人力。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种基于生成对抗网络的施工场地自动布置方法,由此解决现有的施工场地布置方法依赖人工经验、效率低等技术问题。
5.为实现上述目的,按照本发明的第一方面,提供了一种基于生成对抗网络的施工场地自动布置方法,该方法包括:
6.训练阶段:
7.将包括建筑轮廓、对应施工场地轮廓的图像及建筑工程信息输入生成对抗网络的生成器,所述生成器对所述图像进行编解码生成所述建筑的施工场地布置图并输入判别器,以施工场地布置图与真实施工场地布置图的相似度最高为目标,训练所述生成器;
8.应用阶段:
9.将拟建建筑轮廓、对应施工场地轮廓及建筑工程信息输入训练好的生成对抗网络模型,得到所述拟建建筑的施工场地布置图。
10.所述施工场地布置图包括道路节点分类信息及场地区域分类信息。
11.优选地,对所述建筑的施工现场俯视图进行图像处理,获取所述建筑的建筑轮廓、施工场地轮廓及真实施工场地布置图。
12.优选地,对所述建筑的施工现场俯视图进行轮廓识别,获取所述建筑的建筑轮廓、施工场地轮廓。
13.优选地,所述施工场地布置图包括道路节点分类信息及场地区域分类信息。
14.优选地,所述道路节点分类信息包括:四类单独路口、四类l形路口、四类t形路口
及十字路口;
15.所述场地区域分类信息包括:施工区、办公区、生活区、绿化区、教育区、加工区、材料堆场。
16.优选地,所述建筑工程信息包括用工高峰期人数及施工期间的钢筋、木料、混凝土及预制件的最大堆放量。
17.按照本发明的第二方面,提供了一种基于生成对抗网络的施工场地自动布置系统,包括:计算机可读存储介质和处理器;
18.所述计算机可读存储介质用于存储可执行指令;
19.所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行如第一方面所述的方法。
20.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
21.本发明提供的基于生成对抗网络的施工场地自动布置方法,从建筑的实际施工场地俯视图中获取场地轮廓、拟建建筑轮廓,结合实际工程资料,输入至生成对抗网络的生成器生成建筑的施工场地布置方案,将其建筑的真实施工场地布置方案输入至生成对抗网络的判别器,以对生成器进行训练,通过训练好的生成对抗网络实现对拟建建筑施工场地布置方案的自动生成。本发明提供的方法利用机器学习的技术实现场地布置方自动生成,能够快速生成大量的可行方案,大幅减少设计施工场地布置方案所消耗的人力资源与时间,且生成的方案安全和合理性有一定的保证,为建筑施工面向智能化的发展提供了有力的技术支持。
附图说明
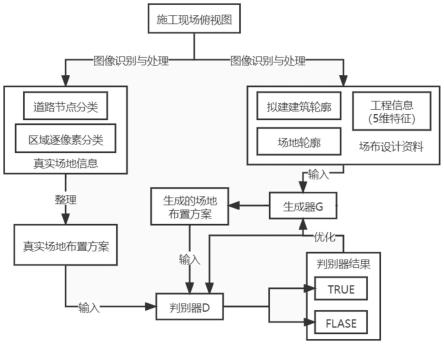
22.图1为本发明实施例提供的基于生成对抗网络的施工场地自动布置方法的训练阶段示意图;
23.图2为本发明实施例提供的基于生成对抗网络的施工场地自动布置方法的应用阶段示意图。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
25.本发明实施例提供一种基于生成对抗网络的施工场地自动布置方法,其特征在于,该方法包括:
26.训练阶段:
27.将包括建筑轮廓、与所述建筑轮廓对应的施工场地轮廓的图像(即建筑的场布资料图)及与所述建筑轮廓对应的建筑工程信息输入生成对抗网络的生成器,所述生成器对所述图像进行编解码生成所述建筑的施工场地布置图并输入判别器,以施工场地布置图与真实施工场地布置图的相似度最高为目标,训练所述生成器;
28.应用阶段:
29.将包括拟建建筑轮廓、与所述拟建建筑轮廓对应的施工场地轮廓的图像(即拟建建筑的场布资料图)及与所述拟建建筑轮廓对应的建筑工程信息输入训练好的生成对抗网络模型,得到所述拟建建筑的施工场地布置图。
30.优选地,对所述建筑的施工现场俯视图进行图像处理,获取所述建筑的建筑轮廓、施工场地轮廓及真实施工场地布置图。
31.优选地,基于图像轮廓识别算法对建筑的施工现场俯视图进行轮廓识别,获取所述建筑的建筑轮廓以及场地轮廓。
32.优选地,所述建筑轮廓包括建筑轮廓顶点坐标,所述施工场地轮廓包括施工场地轮廓顶点坐标。
33.优选地,所述施工场地布置图包括道路节点分类信息及场地区域分类信息。
34.具体地,训练数据从实际建筑工程的俯视图像中获取,也通过对建筑的施工现场俯视图(例如:建筑的施工现场航拍照片)进行处理,得到训练数据。
35.在训练阶段之前,还包括训练数据预处理阶段:对建筑的施工现场俯视图进行图像处理,获取所述建筑的建筑轮廓、场地轮廓及所述建筑的真实施工场地布置图;其中,所述建筑的真实施工场地布置图包括场地道路节点分类信息、场地区域分类信息。
36.可以理解的是,在获取训练数据时,所述建筑是指已经具有合格的、通过验证的施工场地布置方案(即真实的施工场地布置方案)的建筑,并且所述建筑的施工场地已按照真实的施工场地布置方案完成了布置,因此,通过对所述建筑的施工现场俯视图进行相应的处理,即可获得该建筑的真实的施工场地布置方案中的关键信息(即道路节点分类信息及场地区域分类信息)。也即,不论是生成器生成的施工场地布置图、还是真实的施工场地布置图,均包括道路节点分类信息及场地区域分类信息。
37.其中,基于图像轮廓识别算法对建筑的施工现场俯视图进行处理,提取建筑轮廓以及场地轮廓,得到多边形轮廓的顶点坐标,也即,识别出场地的外轮廓和拟建建筑外轮廓,识别结果用轮廓多边形的顶点坐标进行表示。
38.通过分类算法对建筑的施工现场俯视图进行处理,对场地内的道路结点进行分类;对场内区域进行逐像素分类,得到场地区域分类结果。
39.也即,所述道路节点通过对建筑的施工现场俯视图进行逐像素分类获取,得到道路结点分类结果;所述场地区域分类通过对建筑的施工现场俯视图进行逐像素分类获取,得到场地区域分类结果。
40.道路节点分类和区域分类结果共同组成真实场地布置方案,将输入判别器;根据建筑轮廓和场地轮廓的顶点坐标,建立包括建筑轮廓和场地轮廓的场布资料图并输入生成器,用于生成场地布置方案;
41.优选地,所述道路节点分类信息包括:四类单独路口、四类l形路口、四类t形路口及十字路口。
42.具体地,如表1所示,道路结点共计分为13类。
43.表1道路节点分类表
[0044][0045][0046]
所述场地区域分类信息包括:施工区、办公区、生活区、绿化区、教育区、加工区、材料堆场。
[0047]
具体地,对场内区域进行逐像素分类,将其分为施工区、办公区、生活区、绿化区、教育区、加工区、材料堆场共7类。
[0048]
优选地,所述建筑工程信息包括用工高峰期人数及施工期间的钢筋、木料、混凝土及预制件的最大堆放量。
[0049]
具体地,实际工程信息(即建筑工程信息)包含用工高峰期人数、施工期间钢筋、木料、混凝土以及预制件最大材料堆放量,以5维向量汇总作为输入。
[0050]
在生成对抗训练阶段,生成器的输入为实际工程数据(向量)、包括拟建建筑轮廓和场地轮廓的顶点坐标的场布资料图,输出生成的场地布置方案(道路布置和场地分区图像);所述判别器将同时输入真实场地布置方案和生成场地布置方案,对其真实性进行判别后输出结果反馈给生成器和判别器,各自进行优化调整后再次执行这一过程;所述优化过程将在生成器和判别器达到纳什均衡时结束。
[0051]
实际场布应用阶段,所述实际场布应用的过程中,模型输入端应为待设计的施工现场场地外轮廓、拟建建筑外轮廓以及实际的工程信息(用工高峰期人数、施工期间钢筋、木料、混凝土以及预制件最大材料堆放量);输出为道路布置和场地分区图像。
[0052]
为了在网络的输入端将场地布置所需要的约束信息输入网络中,本发明的网络输入分为三部分,一部分是涵盖了实际工程信息的5维特征向量,五个维度分别是用工高峰期人数、施工期间钢筋、木料、混凝土以及预制件最大材料堆放量;剩余两部分则是拟建建筑的轮廓点坐标和整个场地的轮廓点坐标;
[0053]
本发明实施例提供的方法中所用的真实场布方案通过整合道路节点分类和区域逐像素分类结果进行表示——按照道路节点划分整个场地,每个区域内的逐像素分类概率取平均值,从而返回整个区域的类别;
[0054]
本发明实施例提供的方法中所用的生成场布方案通过三个输入(5维特征向量与两个轮廓点坐标)进行生成。生成的场布方案,其表现形式为场内道路和被道路划分的各个分区。
[0055]
训练过程中,对于收集到的施工现场俯视图及其实际工程数据。在所有数据均处理完成后,随机抽取20%作为测试集,剩余80%用于生成对抗网络的训练。
[0056]
网络生成的场地布置方案用简单的函数表示为:
[0057]
xg=g(zb),zb为输入的轮廓点坐标和特征向量
[0058]
生成器g实际上由两部分组成,分别是用于从包括建筑轮廓、对应施工场地轮廓的图像中提取场地布置规则逻辑图特征的编码器g
ec
和基于特征生成场地布置方案图像的解码器g
dc
,生成的结果即为xg[0059]
相对的,场地布置的真实数据表示为:
[0060]
xr∈x
train
[0061]
则对于判别器而言,其输入就是由xg与xr共同组成的数据。
[0062]
优选地,本发明实施例的生成对抗网络中的判别器采用patch gan中可分析离散块的判别器。当判别器d返回的函数值越大时,x来源于训练数据集x
train
的概率越大;反之则很可能是由生成器g生成的数据。
[0063]
生成对抗网络的目的在于反复迭代后达到纳什均衡,在这样的迭代过程中,对于判别器d有如下要求:
[0064][0065]
即:
[0066][0067]
对于生成器g有如下要求:
[0068]
x
g d(g(z))
→0[0069]
综上,将上述优化目标写成一个表达式:
[0070][0071]
相比于传统的机器学习需要定义具体的loss函数,运用生成对抗网络的方式定义无监督的对抗学习损失避免了选取损失函数不当导致的输出结果模糊的问题。
[0072]
在训练上述网络的过程中,具体训练和优化的流程如图1所示。首先对判别器d输入真实的场地布置方案,标记其返回的值应该为ture;之后在对生成器g输入一个场布设计资料,生成器生成一个布置方案后将其输入判别器d,并标记其返回的值应该为false;完成上述步骤之后再将判别器d输出的结果反馈至生成器g中,通过当前输出结果与ture之间的差距来对g进行调整。
[0073]
上述过程为对抗生成网络训练的一个循环。经过预定次数的循环后,检验生成对抗网络是否达到纳什均衡,并检验其返回的误差值是否满足要求。完成上述工作之后就可以保存训练好的gan模型(可称为site-gan)。
[0074]
在应用阶段,如图2所示,将场地布置设计资料输入至训练好的gan模型,输出拟建建筑的场地布置方案。
[0075]
综上,本发明提供的方法以生成对抗网络为核心进行场地布置方案的生成,该方
法的输入为实际工程数据、拟建建筑轮廓和场地轮廓,后两者以其多边形轮廓的顶点坐标形式体现在场布资料图上后进行输入;输出生成的拟建建筑的场地布置方案。
[0076]
场布资料图及施工场地布置图的格式均可为jpg图像。
[0077]
最后为了评价运用事前准备好的测试数据集x
test
对网络进行测试——选取合适的评估参数和指标(方案合理性、方案多样性、与原设计资料的兼容性),评价site-gan模型输出的场地布置方案的合理性。
[0078]
本发明提供的基于生成对抗网络的施工场地自动布置方法,在经过训练后能够依据输入的场地布置设计资料自动生成大量场地布置方案,并将结果用可视化的方式将方案呈现出来。训练数据预处理过程用于从实际的照片中提取场地布置信息和场布设计资料;生成对抗训练过程则通过生成器与判别器之间的不断优化,达到生成满足条件的场地布置方案的效果;实际场布应用可通过训练好的生成器生成大量场地布置方案。对于模型的效果评价,主要对生成方案的合理性、多样性以及原设计资料的兼容性三个方面进行评估。本方法从场地轮廓、拟建建筑轮廓和实际工程资料出发,利用机器学习的技术进行场地布置方自动生成,旨在快速生成大量的可行方案。运用本方法可大幅减少设计施工场地布置方案所消耗的人力资源与时间,且生成的方案安全和合理性有一定的保证。为建筑施工面向智能化的发展提供了有力的技术支持。
[0079]
本发明实施例提供一种基于生成对抗网络的施工场地自动布置系统,包括:计算机可读存储介质和处理器;
[0080]
所述计算机可读存储介质用于存储可执行指令;
[0081]
所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行如上述任一实施例所述的方法。
[0082]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1