一种导航卫星星座定位精度分析与仿真方法
1.本发明涉及航天计算机仿真技术领域,对导航星座的计算机仿真建模,伪距计算,gdop几何精度因子计算,导航定位结果模拟计算,是一种导航卫星星座定位精度分析与仿真方法。
背景技术:
2.全球导航定位系统最早是由美国提起并开始研制,经过20年的努力,耗资200亿美元,gps全球导航定位系统于1995年正式进入全面运行状态。gps 的成功建成是继人类登月和发明航天飞机后在空间领域中的又一重要成就。在这之后俄罗斯,欧洲,中国等各航天大国陆续开始研究自己的全球卫星定位导航系统。对于导航定位系统的仿真分析越发重要。
3.综上所述,本发明将通过数学建模,仿真计算的方法对导航定位过程进行全过程模拟仿真,并将仿真计算结果通过数据,曲线等方式进行输出。
4.目前很多工程任务中如航空航天,资源勘测需要依赖全球卫星定位系统。在任务设计阶段需要考虑对目前已有的导航定位系统的使用效率;或者考虑在现有导航定位系统基础之上,部分卫星设备发生故障的情况下对任务的影响;或者未来有更多导航设备参与组网后对任务效能的提升。需要通过计算机仿真的方法进行预研阶段的论证。
技术实现要素:
5.本发明为克服现有技术的不足,本发明提供了一种导航卫星星座定位精度分析与仿真方法,本发明提供了以下技术方案:
6.一种导航卫星星座定位精度分析与仿真方法,所述方法包括以下步骤:
7.步骤1:基于导航星座轨道信息,建立导航星座轨道外推模型;
8.步骤2:基于导航用户信息,建立导航用户时空轨迹;
9.步骤3:通过导航用户与导航定位星座之间的几何关系,进行可见性判断,将导航用户能够接收到的导航卫星单独分组;
10.步骤4:根据导航用户和所有能见的导航卫星通过选星算法确定导航用户最终所使用的导航卫星;
11.步骤5:根据环境模型,模拟计算导航卫星与导航用户之间的伪距信号;
12.步骤6:根据计算得出的导航卫星与导航用户之间的伪距信号,建立伪距方程组,求解导航用户的空间估计位置,与优选导航定位星,gdop几何精度因子信息;
13.步骤7:将计算得到的优选定位星信息,导航用户导航定位位置,gdop几何精度因子信息存储至硬盘。
14.优选地,所述步骤1具体为:导入所有导航卫星的初始位置,根据理想轨道模型或者sgp4模型或者hpop模型对轨道进行外推计算。
15.优选地,所述步骤2具体为:
16.将用户的移动轨迹时空信息通过配置文件导入。
17.优选地,所述步骤3具体为:
18.考虑地球遮挡,导航接收机最低接收仰角等约束条件,筛选整个导航卫星星座中能够接收到信号的卫星。
19.优选地,所述步骤4具体为:
20.将所有能够接收到信号的卫星,四个分为一组计算gdop值,将gdop值最小的一组导航定位星选做优选导航定位星;
21.将所有能够接收到信号的卫星,四个分为一组计算gdop值,将gdop值最小的一组导航定位星选做优选导航定位星;
22.在计算gdop值时,先以测站位置为原点,建立enu坐标系,则可构建该测站对所有可观测卫星的方向余弦矩阵:
[0023][0024]
其中,αi·
βi·
γi(i=1,2,
…
n)为测站到第i颗卫星视线方向的三个方向角;
[0025]
则定位精度因子则通过下式表示:
[0026][0027]
优选地,所述步骤5具体为:
[0028]
根据对流层模型,电离层模型,导航卫星与导航用户之间的相对距离计算导航接收机所得到的与导航卫星之间的伪距信号。
[0029]
优选地,所述步骤6具体为:
[0030]
根据导航接收机所收到的伪距信号与四颗导航卫星的位置信息建立伪距方程组,计算得到导航用户的定位位置信息;
[0031]
在进行伪距定位时,采用牛顿迭代算法经若干次迭代后进行定位,伪距方程通过下式表示:
[0032][0033]
其中,xi,yi,zi表示第i颗卫星在ecef坐标系下的位置,该位置可以通过卫星轨道参数计算得到;x,y,z表示接收机在ecef坐标系下的位置;δtu表示等效钟差;
[0034]
将伪距在接收机位置x,y,z和δtu处进行泰勒展开可得:
[0035][0036]
同理可得:
[0037][0038]
[0039]
得伪距在x,y,z处的泰勒展开为:
[0040]
ρ
i-ρi(x,y,z,δtu)=r
x
·
δx+ry·
δy+rz·
δz+1
·
δδtu+ε
[0041]
n颗卫星伪距定位整理可得:
[0042][0043]
其中有:
[0044][0045][0046][0047]
其中,和δt
u,k-1
表示将k-1次求得的位置和等效钟差结果,将结果代入到本次迭代中求解位置和等效钟差;
[0048]
利用最小二乘法求解伪距定位线性矩阵方程有:
[0049][0050]
当已知各颗卫星的测量误差方差和权重,则可以运用加权最小二乘法求解,在得到非线性方程的根后,对接收机位置和等效钟差进行更新:
[0051][0052]
δt
u,k
=δt
u,k-1
+δδtu[0053]
迭代收敛后所得位置即为定位位置。
[0054]
一种导航卫星星座定位精度分析与仿真系统,所述系统包括:
[0055]
模型建立模块,所述模型建立模块基于导航星座轨道信息,建立导航星座轨道外推模型;
[0056]
导航轨迹模块,所述导航轨迹模块基于导航用户信息,建立导航用户时空轨迹;
[0057]
分组模块,所述分组模块通过导航用户与导航定位星座之间的几何关系,进行可
见性判断,将导航用户能够接收到的导航卫星单独分组;
[0058]
导航卫星模块,所述导航卫星模块根据导航用户和所有能见的导航卫星通过选星算法确定导航用户最终所使用的导航卫星;
[0059]
伪距信号模块,所述伪距信号模块根据环境模型,模拟计算导航卫星与导航用户之间的伪距信号;
[0060]
信息模块,所述信息模块根据计算得出的导航卫星与导航用户之间的伪距信号,建立伪距方程组,求解导航用户的空间估计位置,与优选导航定位星, gdop几何精度因子信息;
[0061]
存储模块,所述存储模块将计算得到的优选定位星信息,导航用户导航定位位置,gdop几何精度因子信息存储至硬盘。
[0062]
一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现导航卫星星座定位精度分析与仿真方法。
[0063]
一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时,所述处理器执行导航卫星星座定位精度分析与仿真方法。
[0064]
本发明具有以下有益效果:
[0065]
本发明通过对导航全过程进行建模,模拟实际导航定位过程以分析导航用户在实际任务当中对导航定位系统的应用。并于stk等专业航天仿真软件进行对比以验证本发明建模的正确性。
附图说明
[0066]
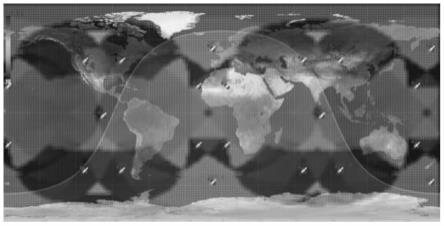
图1为本发明计算gdop全球分布;
[0067]
图2为stk计算全球gdop分布;
[0068]
图3为本发明计算gdop北纬30度分布;
[0069]
图4为stk计算gdop北纬30度线分布;
[0070]
图5为本发明计算gdop赤道分布;
[0071]
图6为stk计算gdop赤道分布;
[0072]
图7为本发明导航定位精度与stk对比;
[0073]
图8为轨道外推受力分析;
[0074]
图9为用户移动轨迹时空信息配置文件格式;
[0075]
图10为通过导航星覆盖范围与接收机几何关系计算可见性。
具体实施方式
[0076]
以下结合具体实施例,对本发明进行了详细说明。
[0077]
具体实施例一:
[0078]
根据图1至图10所示,本发明为解决上述技术问题采取的具体优化技术方案是:本发明涉及一种导航卫星星座定位精度分析与仿真方法。
[0079]
一种导航卫星星座定位精度分析与仿真方法,所述方法包括以下步骤:
[0080]
步骤1:基于导航星座轨道信息,建立导航星座轨道外推模型;
[0081]
步骤2:基于导航用户信息,建立导航用户时空轨迹;
[0082]
步骤3:通过导航用户与导航定位星座之间的几何关系,进行可见性判断,将导航用户能够接收到的导航卫星单独分组;
[0083]
步骤4:根据导航用户和所有能见的导航卫星通过选星算法确定导航用户最终所使用的导航卫星;
[0084]
步骤5:根据环境模型,模拟计算导航卫星与导航用户之间的伪距信号;
[0085]
步骤6:根据计算得出的导航卫星与导航用户之间的伪距信号,建立伪距方程组,求解导航用户的空间估计位置,与优选导航定位星,gdop几何精度因子信息;
[0086]
步骤7:将计算得到的优选定位星信息,导航用户导航定位位置,gdop几何精度因子信息存储至硬盘。
[0087]
具体实施例二:
[0088]
本技术实施例二与实施例一的区别仅在于:
[0089]
所述步骤1具体为:导入所有导航卫星的初始位置,根据理想轨道模型或者sgp4模型或者hpop模型对轨道进行外推计算。具体实施例三:
[0090]
本技术实施例三与实施例二的区别仅在于:
[0091]
所述步骤2具体为:
[0092]
将用户的移动轨迹时空信息通过配置文件导入。
[0093]
具体实施例四:
[0094]
本技术实施例四与实施例三的区别仅在于:
[0095]
所述步骤3具体为:
[0096]
考虑地球遮挡,导航接收机最低接收仰角等约束条件,筛选整个导航卫星星座中能够接收到信号的卫星。
[0097]
具体实施例五:
[0098]
本技术实施例五与实施例四的区别仅在于:
[0099]
所述步骤4具体为:
[0100]
将所有能够接收到信号的卫星,四个分为一组计算gdop值,将gdop值最小的一组导航定位星选做优选导航定位星;
[0101]
将所有能够接收到信号的卫星,四个分为一组计算gdop值,将gdop值最小的一组导航定位星选做优选导航定位星;
[0102]
在计算gdop值时,先以测站位置为原点,建立enu坐标系,则可构建该测站对所有可观测卫星的方向余弦矩阵:
[0103][0104]
其中,αi·
βi·
γi(i=1,2,
…
n)为测站到第i颗卫星视线方向的三个方向角;
[0105]
则定位精度因子则通过下式表示:
[0106][0107]
具体实施例六:
[0108]
本技术实施例六与实施例五的区别仅在于:
[0109]
所述步骤5具体为:
[0110]
根据对流层模型,电离层模型,导航卫星与导航用户之间的相对距离计算导航接收机所得到的与导航卫星之间的伪距信号。
[0111]
具体实施例七:
[0112]
本技术实施例七与实施例六的区别仅在于:
[0113]
所述步骤6具体为:
[0114]
根据导航接收机所收到的伪距信号与四颗导航卫星的位置信息建立伪距方程组,计算得到导航用户的定位位置信息;
[0115]
在进行伪距定位时,采用牛顿迭代算法经若干次迭代后进行定位,伪距方程通过下式表示:
[0116][0117]
其中,xi,yi,zi表示第i颗卫星在ecef坐标系下的位置,该位置可以通过卫星轨道参数计算得到;x,y,z表示接收机在ecef坐标系下的位置;δtu表示等效钟差;
[0118]
将伪距在接收机位置x,y,z和δtu处进行泰勒展开可得:
[0119][0120]
同理可得:
[0121][0122][0123]
得伪距在x,y,z处的泰勒展开为:
[0124]
ρ
i-ρi(x,y,z,δtu)=r
x
·
δx+ry·
δy+rz·
δz+1
·
δδtu+ε
[0125]
n颗卫星伪距定位整理可得:
[0126][0127]
其中有:
[0128][0129][0130][0131]
其中,和δt
u,k-1
表示将k-1次求得的位置和等效钟差结果,将结果代入到本次迭代中求解位置和等效钟差;
[0132]
利用最小二乘法求解伪距定位线性矩阵方程有:
[0133][0134]
当已知各颗卫星的测量误差方差和权重,则可以运用加权最小二乘法求解,在得到非线性方程的根后,对接收机位置和等效钟差进行更新:
[0135][0136]
δt
u,k
=δt
u,k-1
+δδtu[0137]
迭代收敛后所得位置即为定位位置。
[0138]
具体实施例八:
[0139]
本技术实施例八与实施例七的区别仅在于:
[0140]
一种导航卫星星座定位精度分析与仿真系统,所述系统包括:
[0141]
模型建立模块,所述模型建立模块基于导航星座轨道信息,建立导航星座轨道外推模型;
[0142]
导航轨迹模块,所述导航轨迹模块基于导航用户信息,建立导航用户时空轨迹;
[0143]
分组模块,所述分组模块通过导航用户与导航定位星座之间的几何关系,进行可见性判断,将导航用户能够接收到的导航卫星单独分组;
[0144]
导航卫星模块,所述导航卫星模块根据导航用户和所有能见的导航卫星通过选星算法确定导航用户最终所使用的导航卫星;
[0145]
伪距信号模块,所述伪距信号模块根据环境模型,模拟计算导航卫星与导航用户之间的伪距信号;
[0146]
信息模块,所述信息模块根据计算得出的导航卫星与导航用户之间的伪距信号,
建立伪距方程组,求解导航用户的空间估计位置,与优选导航定位星, gdop几何精度因子信息;
[0147]
存储模块,所述存储模块将计算得到的优选定位星信息,导航用户导航定位位置,gdop几何精度因子信息存储至硬盘。
[0148]
具体实施例九:
[0149]
本技术实施例九与实施例八的区别仅在于:
[0150]
本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现导航卫星星座定位精度分析与仿真方法。具体实施例十:
[0151]
本技术实施例十与实施例九的区别仅在于:
[0152]
本发明提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时,所述处理器执行导航卫星星座定位精度分析与仿真方法。
[0153]
以上所述仅是一种导航卫星星座定位精度分析与仿真方法的优选实施方式,一种导航卫星星座定位精度分析与仿真方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1