一种智能周转箱的制作方法
1.本发明属于智能物流箱技术领域,尤其是涉及一种智能周转箱。
背景技术:
2.近年来,随着信息时代的快速发展,社会工业化的进程得以快速推进,物流的社会价值极具增大。众所周知,在物流搬运和运输的过程中,周转箱是必不可少的承载工具之一;为了保证商品的运输安全性,周转箱在搬运和运输过程中需要满足一定的条件,比如防止翻转、防止碰撞等等;但是在实际工作当中,周转箱难免会发生倾斜和碰撞,当这些倾斜达到一定数值时,或者碰撞强度达到一定数值时,可能就会对箱内的商品产生质的破坏,因此,设计开发一种智能周转箱,使其能够对箱体的倾斜状态和碰撞强度进行智能监控。
技术实现要素:
3.针对以上的技术缺陷,本发明提供了一种智能周转箱,利用各类高精度的传感器、无线通讯网络和具有高速数据实时处理能力的计算机;实现对物流箱的倾斜角度、碰撞强度在线检测,为物流箱的平稳运输提供宝贵的数据支撑。
4.为实现上述技术目的,本发明通过以下技术方案实现:
5.本发明的目的是提供一种智能周转箱,包括:
6.箱体、电控锁和电源;所述箱体上开设有安装电控锁的锁体安装槽;
7.用于实时或定时检测箱体状态信息、电控锁工作状态信息的数据获取模块;所述箱体状态信息包括箱体的加速度数据和振动数据;
8.接收数据获取模块输出的箱体状态信息,并对箱体状态信息进行预处理、控制电控锁工作状态的现场控制器;
9.通过无线通信网络与现场控制器进行数据交互的远程控制器;所述远程控制器包括远程无线通讯模块和远程数据处理模块;远程数据处理模块通过对箱体状态信息的分析,得出箱体的倾斜角度和碰撞加速度,即碰撞强度;
10.通过无线通信网络与远程控制器进行数据交互的手持终端;其中:
11.所述现场控制器与数据获取模块进行数据交互。
12.优选地:所述箱体为对开式箱体,所述箱体的开启面包括第一对折面和第二对折面,所述第一对折面和第二对折面的相对位置均设有凹槽,第一对折面和第二对折面对折后两个凹槽形成一个封闭的锁体安装槽,所述电控锁安装在锁体安装槽内。
13.优选地:所述锁体的上表面与箱盖的上表面平齐或者两者的表面落差不大于3mm。
14.优选地:所述电控锁包括相互独立的锁销单元和锁闭单元,所述锁销单元和锁闭单元分别位于两个不同的凹槽内,所述锁销单元和锁闭单元的拼接面为平面结构。
15.优选地:所述锁销单元包括锁销壳和锁销盖;在锁销壳内沿垂直锁销单元的拼接面方向滑动安装有锁销,所述锁销上设有锁孔;所述锁闭单元包括锁闭壳和锁闭盖;在锁闭单元的拼接面上对应锁销位置设有锁销孔,在锁闭壳内垂直锁销方向安装有锁舌,在锁闭
壳内设有安装锁舌的锁舌滑槽,所述锁舌的后端部安装有第一复位弹簧;所述锁舌连接驱动锁舌组件与锁销实现锁闭的动力单元;锁闭壳内还安装有连接动力单元的一个电源装置。
16.优选地:在所述锁销单元内设有滑槽,所述锁销位于滑槽内,在滑槽内设有定位块,所述锁销后端部与定位块之间设有第二复位弹簧。
17.优选地:所述锁销的后端部设有复位弹簧安装槽,在复位弹簧安装槽的后端部设有复位弹簧安装柱,在复位弹簧安装槽上部安装有弹簧压盖;所述弹簧压盖或锁销上设有上锁扭,对应上锁扭位置所述锁销盖上设有上锁扭滑槽.
18.优选地:所述锁销盖和锁闭盖均设有箱盖连接部;所述箱盖连接部的外边缘大于锁销壳和锁闭盖的外边缘;所述箱盖连接部的下表面设有箱盖连接柱,所述锁体连接部上设有连接孔,所述箱盖连接柱上设有自锁部或者铆钉扣或者螺母。
19.优选地:所述第一对折面和第二对折面通过热熔的方式与锁体连接部连接。
20.优选地:所述箱体为翻盖式箱体,所述箱体的箱盖一侧与箱体铰接,在箱盖的自由端与箱体的相对位置均设有凹槽,当箱盖闭合时,两个凹槽拼接成一个l型封闭的锁体安装槽,所述电控锁安装在锁体安装槽内。
21.优选地:所述电控锁包括相互垂直的锁销单元和锁闭单元,所述锁销单元和锁闭单元分别位于两个不同的凹槽内。
22.优选地:所述锁销单元包括锁销壳和通过紧固件安装在锁销壳内侧的锁销盖;所述锁销壳与锁闭单元拼接侧设有开放式锁销槽,所述锁销槽内安装有翻转锁销,所述锁销盖上设有锁销翻转槽;
23.锁闭单元包括锁闭壳和锁闭盖;在锁闭单元的拼接面上对应翻转锁销位置设有插销孔,在锁闭壳内插销孔的一侧通过第一销轴设有第一锁勾,在第一锁勾的对侧通过第二销轴安装有第二锁勾,所述第二锁勾的下端连接电驱动构件,第一销轴和第二销轴上还安装有使第一锁勾和第二锁勾实现自动复位的扭簧;所述电驱动构件为镍钛合金丝,所述镍钛合金丝的另一端连接现场控制器。
24.优选地:锁销翻转槽的内侧设有翻转锁销限位凸起;第二锁勾的右侧设有上锁限位块;在锁闭壳内第一锁勾的下方设有用于检测锁销是否到位的上锁到位检测元件,所述上锁到位检测元件的输出引脚与现场控制器进行数据交互。
25.优选地:所述上锁检测元件为微动式触发开关。
26.优选地:所述锁销盖和锁闭盖均设有箱盖连接部;箱盖连接部的外边缘大于锁销壳和锁闭盖的外边缘;所述箱盖连接部通过热熔的方式与锁体连接部连接。
27.优选地:所述箱盖连接部的下表面设有箱盖连接柱,所述锁体连接部上设有连接孔,所述箱盖连接柱上设有自锁部或者铆钉扣或者螺母;所述锁体连接部为半圆形凸出部,半圆形凸出部沿凹槽内壁设置数个,对应凹槽所述锁销壳和锁闭壳的外表面对应连接柱位置设有定位凹槽。
28.优选地:所述电源为充电电池,所述现场控制器上设有充电接口。
29.优选地:所述数据获取模块包括三轴加速度传感器;所述远程数据处理模块提取三轴加速度传感器的三轴加速度数据,并通过三个加速度数据计算三轴加速度传感器的倾斜角和撞击加速度,将计算得到的三轴加速度传感器的倾斜角转换为物流箱的倾斜角。
30.优选地:所述三轴加速度传感器的唤醒引脚与现场控制器的唤醒引脚连接;所述三轴加速度传感器的数据引脚与现场控制器的数据引脚通过i2c协议或spi协议通信;所述三轴加速度传感器的时钟引脚与现场控制器的时钟引脚连接。
31.优选地:通过三个加速度数据计算三轴加速度传感器的倾斜角的具体公式为:
32.α=arctan(a
x
/squr(a
y2
+a
z2
));
33.β=arctan(ay/squr(a
x2
+a
z2
));
34.γ=arctan(az/squr(a
y2
+a
x2
));
35.其中:α为x轴加速度传感器和水平线的夹角;β为y轴加速度传感器和水平线的夹角;γ为z轴加速度传感器和水平线的夹角;a
x
是x轴加速度传感器的加速度值;ay是y轴加速度传感器的加速度值;az是z轴加速度传感器的加速度值;
36.通过三个加速度数据计算撞击加速度g的具体公式为:
37.g=a
x
·
sinα+ay·
sinβ+az·
sinγ。
38.优选地:所述数据获取模块包括至少一个滚珠倾斜开关,所述滚珠倾斜开关的输出引脚与现场控制器的i/o端口连接;所述现场控制器的i/o端口连接有与外设进行数据交互的通信模块。
39.优选地:所述滚珠倾斜开关包括触发角度为a的第一滚珠倾斜开关、触发角度为b的第二滚珠倾斜开关、触发角度为c的第三滚珠倾斜开关;其中:a、b、c不相同。
40.优选地:所述数据获取模块包括至少一个应变片组,每个应变片组包括x轴应变片、y轴应变片和z轴应变片;x轴、y轴和z轴相互垂直;所述远程数据处理模块提取应变片组的三个应变数据,并通过三个应变数据计算应变片组的倾斜角,将计算得到的应变片组的倾斜角转换为物流箱的倾斜角。
41.优选地:通过三个应变数据计算应变片组的倾斜角的具体公式为:
42.α=arctan(t
x
/squr(t
y2
+t
z2
));
43.β=arctan(ty/squr(t
x2
+t
z2
));
44.γ=arctan(tz/squr(t
y2
+t
x2
));
45.其中:α为x轴应变片和水平线的夹角;β为y轴应变片和水平线的夹角;γ为z轴应变片和水平线的夹角;t
x
是x轴应变片的应变检测值;ty是y轴应变片的应变检测值;tz是z轴应变片的应变检测值;
46.通过三个应变数据计算撞击加速度g的具体公式为:
47.g=t
x
·
sinα+ty·
sinβ+tz·
sinγ。
48.优选地:所述数据获取模块包括电磁振动传感器。
49.优选地:所述远程控制器包括身份权限识别模块,所述手持终端包括与身份权限识别模块进行数据交互的登陆模块。
50.优选地:所述现场控制器连接有定位模块。
51.本发明具有的优点和技术效果是:
52.本发明将传感器技术、无线通讯网络和具有数据处理能力的计算机技术进行集成;能够实现对物流箱倾斜角度的在线检测,为物流箱的平稳运输提供宝贵的数据支撑。
53.本发明采用三轴加速度传感器和应变片组,能够对物流箱倾斜角度进行精确检测。
54.本发明采用滚珠倾斜开关,能够对物流箱倾斜角度进行快速检测。
附图说明
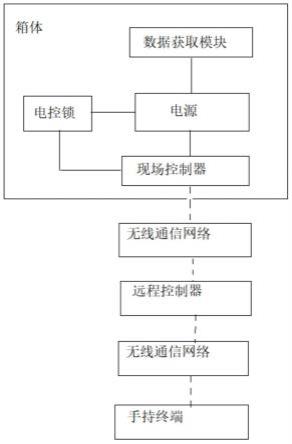
55.图1为本发明优选实施例的原理框图;
56.图2为本发明优选实施例中对开式箱体和电控锁安装完成的结构图;
57.图3为本发明优选实施例中对开式箱体的结构图;
58.图4为本发明优选实施例中对开式箱体的俯视图;
59.图5为本发明优选实施例中对开式箱体上电控锁的结构图;
60.图6为本发明优选实施例中对开式箱体上电控锁锁销单元的结构图;
61.图7为本发明优选实施例中对开式箱体上电控锁锁闭单元的结构图;
62.图8为本发明优选实施例中翻盖式箱体的结构图;
63.图9为本发明优选实施例中翻盖式箱体和电控锁安装完成的结构图;
64.图10为本发明优选实施例中对开式箱体上电控锁锁销单元的结构图;
65.图11为本发明优选实施例中对开式箱体上电控锁锁闭单元的结构图;
66.图12为本发明优选实施例中现场控制器的电路图;
67.图13为本发明优选实施例中三轴加速度的第一电路图;
68.图14为本发明优选实施例中三轴加速度的第二电路图;
69.图15为本发明优选实施例中采用滚珠倾斜开关时的电路图;
70.图16为本发明优选实施例中采用应变片时的电路图。
具体实施方式
71.为了使本发明的上述目的、设计的控制系及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
72.请参阅图1,一种智能周转箱,包括:
73.箱体、电控锁和电源;所述箱体上开设有安装电控锁的锁体安装槽;箱体可以是对开式的箱体,也可以是翻盖式的箱体;电控锁的锁壳采用abs材料,比较耐用,不易损坏,能够重复使用,既达到了环保要求,又可以降低成本;电源采用可充电蓄电池;
74.用于实时或定时检测箱体状态信息、电控锁工作状态信息的数据获取模块;所述箱体状态信息包括箱体的加速度数据和振动数据;数据获取模块可以安装在电控锁上,也可以安装在箱体上;使用时,电控锁和箱体连接为一体,所以两者的加速度和振动基本上保持一致;
75.接收数据获取模块输出的箱体状态信息,并对箱体状态信息进行预处理、控制电控锁工作状态的现场控制器;为了实现数据的精准远程传输,预处理过程主要包括信号放大、模数转换和过滤等;为了实现远程数据传输,现场控制器上安装有无线通讯模块;
76.通过无线通信网络与现场控制器进行数据交互的远程控制器;所述远程控制器包括远程无线通讯模块和远程数据处理模块;远程数据处理模块通过对箱体状态信息的分析,得出箱体的倾斜角度和碰撞加速度,即碰撞强度;
77.通过无线通信网络与远程控制器进行数据交互的手持终端;其中:
78.所述现场控制器与数据获取模块进行数据交互。
79.本技术中的箱体主要分为对开式箱体和翻盖式箱体;下面逐一进行解释说明:
80.请参阅图2至图7,所述箱体为对开式箱体,所述箱体的开启面包括第一对折面1-1和第二对折面1-2,所述第一对折面1-1和第二对折面1-2的相对位置均设有凹槽2,第一对折面和第二对折面对折后两个凹槽形成一个封闭的锁体安装槽3,所述电控锁安装在锁体安装槽内。
81.本技术将电控锁安装在锁体安装槽3内,进而使得所述锁体的上表面与箱盖的上表面平齐或者两者的表面落差不大于3mm。即锁体的上表面和箱盖的上表面共面,或者是锁体凸出很小的一部分,或者锁体凹陷很小的一部分;这样箱体堆放时,能够避免相邻箱体发生干涉,相邻箱体的锁发生刮蹭;
82.所述电控锁包括相互独立的锁销单元4-2和锁闭单元4-1,所述锁销单元和锁闭单元分别位于两个不同的凹槽内,为了便于拼接,所述锁销单元和锁闭单元的拼接面为平面结构。
83.所述锁销单元包括锁销壳5-1和锁销盖;锁销壳5-1用于容纳和安装锁销;锁销盖主要用于密封锁销壳和连接箱体盖板;在锁销壳内沿垂直锁销单元的拼接面方向设置有承担滑动导向作用的滑槽5-4,在所述滑槽内滑动安装有锁销5-2,所述锁销的侧壁设有锁孔5-3;本技术在滑槽内固定设有定位块,所述锁销后端部与定位块之间设有第二复位弹簧;
84.所述锁闭单元包括锁闭壳6-1和锁闭盖,锁闭壳6-1内设置有电路板7;现场控制器和数据获取模块安装在电路板7上,在锁闭单元的拼接面上对应锁销位置设有锁销孔6-4,在锁闭壳内垂直锁销方向安装有锁舌6-3,在锁闭壳内设有安装锁舌的锁舌滑槽6-2,锁舌在锁舌滑槽6-2内实现往返运动,所述锁舌的后端部安装有第一复位弹簧6-5;所述锁舌连接驱动锁舌组件与锁销实现锁闭的动力单元;锁闭壳内还安装有连接动力单元(动力单元包括电机,所述电机通过蜗轮蜗杆齿轮副连接锁舌内侧的动力臂)的一个电源装置,在动力单元的带动下,锁舌伸出,使得锁舌正好插装在锁销的锁孔5-3内,进而实现锁销单元和锁闭单元的锁固。
85.所述锁销的后端部设有复位弹簧安装槽,在复位弹簧安装槽的后端部设有复位弹簧安装柱,在复位弹簧安装槽上部安装有弹簧压盖;所述弹簧压盖或锁销上设有上锁扭,对应上锁扭位置所述锁销盖上设有上锁扭滑槽。
86.所述锁销盖和锁闭盖均设有箱盖连接部;所述箱盖连接部的外边缘大于锁销壳和锁闭盖的外边缘;所述箱盖连接部的下表面设有箱盖连接柱,所述锁体连接部上设有连接孔,所述箱盖连接柱上设有自锁部或者铆钉扣或者螺母。
87.为了实现连接的便捷性,所述第一对折面和第二对折面通过热熔的方式与锁体连接部连接。
88.上述锁闭盖和锁销盖拼接后为圆形、椭圆形或者长方形中的一种。
89.请参阅图8至图11,所述箱体为翻盖式箱体,所述箱体的箱盖一侧与箱体铰接,在箱盖的自由端8-1与箱体的相对位置均设有安装电控锁的凹槽8-2,当箱盖闭合时,两个凹槽拼接成一个l型封闭的锁体安装槽,所述电控锁安装在锁体安装槽内。
90.所述电控锁包括相互垂直的锁销单元9-2和锁闭单元9-1,所述锁销单元和锁闭单元分别位于两个不同的凹槽内。
91.所述锁销单元包括锁销壳和通过紧固件安装在锁销壳内侧的锁销盖;所述锁销壳与锁闭单元拼接侧设有开放式锁销槽8-3,所述锁销槽内安装有翻转锁销8-4,所述锁销盖上设有锁销翻转槽8-5;
92.锁闭单元包括锁闭壳和锁闭盖;在锁闭单元的拼接面上对应翻转锁销位置设有插销孔9-3,在锁闭壳内插销孔的一侧通过第一销轴9-4设有第一锁勾9-5,在第一锁勾的对侧通过第二销轴9-6安装有第二锁勾9-7,所述第二锁勾9-7的下端连接电驱动构件,第一销轴和第二销轴上还安装有使第一锁勾和第二锁勾实现自动复位的扭簧;所述电驱动构件为镍钛合金丝9-8,所述镍钛合金丝的另一端连接现场控制器9-9。
93.锁销翻转槽的内侧设有翻转锁销限位凸起;在翻转锁销翻转后约束限位作用,第二锁勾的右侧设有上锁限位块;在锁闭壳内第一锁勾的下方设有用于检测锁销是否到位的上锁到位检测元件,所述上锁到位检测元件的输出引脚与现场控制器进行数据交互。
94.所述上锁检测元件为微动式触发开关。当锁销触发上锁到位检测元件后,上锁到位检测元件通电将向现场控制器发出上锁信号。
95.所述锁销盖和锁闭盖均设有箱盖连接部;箱盖连接部的外边缘大于锁销壳和锁闭盖的外边缘;所述箱盖连接部通过热熔的方式与锁体连接部连接。
96.所述箱盖连接部的下表面设有箱盖连接柱,所述锁体连接部上设有连接孔,所述箱盖连接柱上设有自锁部或者铆钉扣或者螺母;所述锁体连接部为半圆形凸出部,半圆形凸出部沿凹槽内壁设置数个,对应凹槽所述锁销壳和锁闭壳的外表面对应连接柱位置设有定位凹槽。
97.所述电源为充电电池,所述现场控制器上设有充电接口。
98.请参阅图12至图14,所述数据获取模块包括三轴加速度传感器;所述远程数据处理模块提取三轴加速度传感器的三轴加速度数据,并通过三个加速度数据计算三轴加速度传感器的倾斜角和撞击加速度,将计算得到的三轴加速度传感器的倾斜角转换为物流箱的倾斜角。
99.所述三轴加速度传感器的唤醒引脚与现场控制器的唤醒引脚连接;所述三轴加速度传感器的数据引脚与现场控制器的数据引脚通过i2c协议或spi协议通信;所述三轴加速度传感器的时钟引脚与现场控制器的时钟引脚连接。
100.当所述三轴加速度传感器的数据引脚与控制器的数据引脚通过i2c协议进行连接通讯时,所述三轴加速度传感器的型号为da213b;所述控制器的型号为fm33leox5,所述三轴加速度传感器的sda引脚与控制器的sda引脚连接。
101.所述三轴加速度传感器的数据引脚与控制器的数据引脚通过spi协议进行通讯时,所述三轴加速度传感器的型号为adxl362或adxl346;所述控制器的型号为fm33leox5;所述三轴加速度传感器的sclk引脚与控制器的sclk引脚连接,所述三轴加速度传感器的sdi引脚与控制器的sdi引脚连接,所述三轴加速度传感器的sdo引脚与控制器的sdo引脚连接,所述三轴加速度传感器的cs引脚与控制器的cs引脚连接,所述三轴加速度传感器的int1引脚与控制器的唤醒引脚连接。
102.在本技术中,现场控制器的型号为fm33leox5;三轴加速度传感器的型号为da213b或adxl362或adxl346,fm33leox5的2号引脚pa15_svs2接电源模块,fm33leox5的36号引脚和37号引脚连接晶振电路,该晶振电路的频率为32768hz;fm33leox5的31号引脚接测试点;
fm33leox5的35号引脚可以连接重力传感器,通过重力传感器的信号实现唤醒功能。工作时:当所述三轴加速度传感器检测到的三轴加速度变换达到阈值时,唤醒端输出高或低有效信号,该信号用于唤醒现场控制器,当现场控制器被唤醒后,控制器接收三轴加速度传感器的数据;当所述三轴加速度传感器检测到的三轴加速度变换未达到阈值时,现场控制器未被唤醒,节约电能。
103.通过三个加速度数据计算三轴加速度传感器的倾斜角的具体公式为:
104.α=arctan(a
x
/squr(a
y2
+a
z2
));
105.β=arctan(ay/squr(a
x2
+a
z2
));
106.γ=arctan(az/squr(a
y2
+a
x2
));
107.其中:α为x轴加速度传感器和水平线的夹角;β为y轴加速度传感器和水平线的夹角;γ为z轴加速度传感器和水平线的夹角;a
x
是x轴加速度传感器的加速度值;ay是y轴加速度传感器的加速度值;az是z轴加速度传感器的加速度值;
108.通过三个加速度数据计算撞击加速度g的具体公式为:
109.g=a
x
·
sinα+ay·
sinβ+az·
sinγ。
110.请参阅图15,所述数据获取模块包括一个或多个滚珠倾斜开关,现场控制器的型号为gd32f130g6u6,所述滚珠倾斜开关的输出引脚与现场控制器连接;所述现场控制器连接有与外设进行数据交互的通信模块。
111.所述滚珠倾斜开关包括触发角度为a的第一滚珠倾斜开关、触发角度为b的第二滚珠倾斜开关、触发角度为c的第三滚珠倾斜开关;其中:a、b、c不相同。
112.请参阅图16,所述数据获取模块包括至少一个应变片组,每个应变片组包括x轴应变片、y轴应变片和z轴应变片;x轴、y轴和z轴相互垂直;所述远程数据处理模块提取应变片组的三个应变数据,并通过三个应变数据计算应变片组的倾斜角,将计算得到的应变片组的倾斜角转换为物流箱的倾斜角。
113.在本技术中:现场控制器的型号优选fm33le0x5;三路信号处理电路的输出电阻与现场控制器的adc1引脚、adc2引脚和adc4引脚连接;现场控制器fm33le0x5的osc_in引脚和osc_out引脚接晶振电路,在本优选实施例中,晶振电路的频率为32768hz。
114.信号采集电路包括与应变片依次串联的第四电阻、第五电阻和第十三电阻,应变片的上端通过第四电阻与电源连接;应变片的下端接地,同时依次通过第十三电阻、第五电阻与电源连接,应变片的上端为第一采集点,第五电阻和第十三电阻之间为第二采集点。
115.信号处理电路包括第一运放电路和第二运放电路,其中:第一采集点通过第七电阻与第一运放电路的同相端连接,第二采集点通过第十电阻与第一运放电路的反相端连接;所述第一运放电路的反相端通过第十一电阻与第一运放电路的输出引脚连接;所述第一运放电路的输出引脚通过第八电阻与第二运放电路的反相端连接,所述第二运放电路的反相端通过第九电阻与第二运放电路的反相端的输出端连接。所述第一运放电路和第二运放电路为tp09系列放大器。
116.通过三个应变数据计算应变片组的倾斜角的具体公式为:
117.α=arctan(t
x
/squr(t
y2
+t
z2
));
118.β=arctan(ty/squr(t
x2
+t
z2
));
119.γ=arctan(tz/squr(t
y2
+t
x2
));
120.其中:α为x轴应变片和水平线的夹角;β为y轴应变片和水平线的夹角;γ为z轴应变片和水平线的夹角;t
x
是x轴应变片的应变检测值;ty是y轴应变片的应变检测值;tz是z轴应变片的应变检测值;
121.通过三个应变数据计算撞击加速度g的具体公式为:
122.g=t
x
·
sinα+ty·
sinβ+tz·
sinγ。
123.所述数据获取模块包括电磁振动传感器。
124.由于手持终端的用户可以包括:发件方、收件方、运送方和监管平台方,为了实现各方之间权限和利益,所述远程控制器包括身份权限识别模块,所述手持终端包括与身份权限识别模块进行数据交互的登陆模块。
125.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1