机器人重定位方法和装置、存储介质及电子装置与流程
【】本技术涉及机器人领域,具体而言,涉及一种机器人重定位方法和装置、存储介质及电子装置。
背景技术
0、
背景技术:
1、目前,在进行机器人的重定位时,一般采用机器人在原地进行点云到地图的匹配重定位,即,获取每次匹配的机器人位置及机器人点云与地图匹配的得分,将得分最高的位置(即,得分最高的解),确定为机器人当前所在的位置。
2、然而,采用上述机器人重定位的方式,只获取最高得分的解,对于地图上有相似环境的场景可能会出现重定位未成功的情况。由此可见,相关技术中的机器人重定位方法,存在由于易出现误匹配的情况导致的机器人重定位的准确性低的问题。
技术实现思路
0、
技术实现要素:
1、本技术的目的在于提供一种机器人重定位方法和装置、存储介质及电子装置,以至少解决相关技术中的机器人重定位方法存在由于易出现误匹配的情况导致的机器人重定位的准确性低的问题。
2、本技术的目的是通过以下技术方案实现:
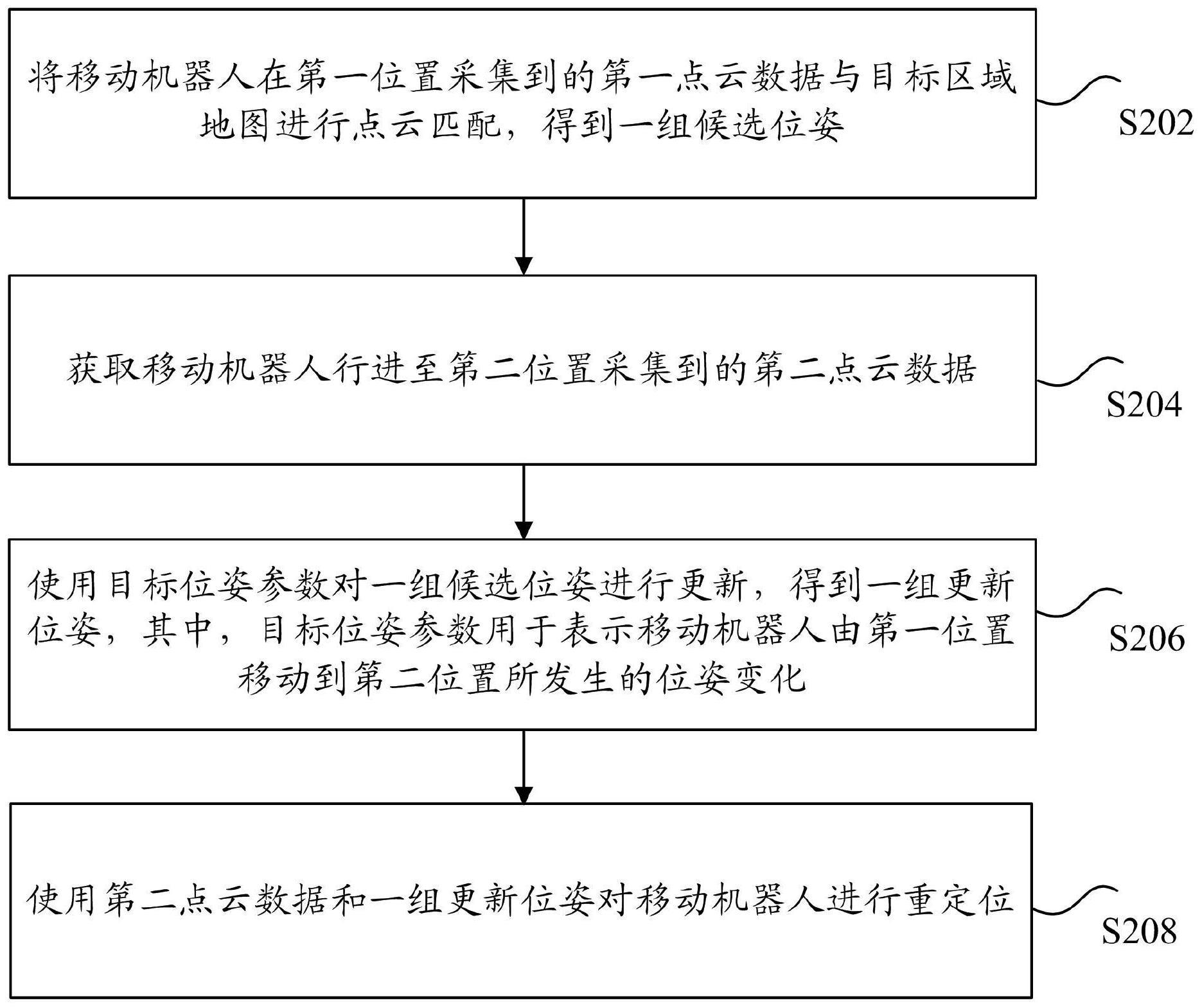
3、根据本技术实施例的一个方面,提供了一种机器人重定位方法,包括:将移动机器人在第一位置采集到的第一点云数据与目标区域地图进行点云匹配,得到一组候选位姿;获取所述移动机器人行进至第二位置采集到的第二点云数据;使用目标位姿参数对所述一组候选位姿进行更新,得到一组更新位姿,其中,所述目标位姿参数用于表示所述移动机器人由所述第一位置移动到所述第二位置所发生的位姿变化;使用所述第二点云数据和所述一组更新位姿对所述移动机器人进行重定位。
4、在一个示例性实施例中,根据以下方式获取所述移动机器人的所述目标位姿参数:通过所述移动机器人上的目标里程计获取所述移动机器人由所述第一位置移动到所述第二位置所产生的里程增量,得到目标里程信息,其中,所述目标位姿参数包括所述目标里程信息。
5、在一个示例性实施例中,所述使用所述第二点云数据和所述一组更新位姿对所述移动机器人进行重定位,包括:确定所述目标区域地图中与所述一组更新位姿中的每个更新位姿对应的点云数据;根据所述每个更新位姿对应的点云数据和所述第二点云数据的匹配度,对所述移动机器人进行重定位。
6、在一个示例性实施例中,所述根据所述每个更新位姿对应的点云数据和所述第二点云数据的匹配度,对所述移动机器人进行重定位,包括:依次对所述每个更新位姿执行以下操作,直到满足校验停止条件,其中,在执行以下操作的过程中,所述每个更新位姿为当前更新位姿,所述校验停止条件包括以下至少之一:所述移动机器人重定位成功,所有更新位姿均已完成校验:在所述当前更新位姿对应的点云数据和所述第二点云数据的匹配度大于或者等于匹配度阈值的情况下,确定对所述当前更新位姿校验通过,其中,所述移动机器人重定位到的位姿为所述当前更新位姿;在所述当前更新位姿对应的点云数据和所述第二点云数据的匹配度小于匹配度阈值的情况下,确定对所述当前更新位姿校验未通过,其中,所述移动机器人重定位到的位姿不是所述当前更新位姿。
7、在一个示例性实施例中,所述根据所述每个更新位姿对应的点云数据和所述第二点云数据的匹配度,对所述移动机器人进行重定位,包括:将所述一组更新位姿中,对应的点云数据与第二点云数据的匹配度最高、且大于或者等于匹配度阈值的更新位姿,确定为所述移动机器人重定位到的位姿。
8、在一个示例性实施例中,所述将移动机器人在第一位置采集到的第一点云数据与目标区域地图进行点云匹配,得到一组候选位姿,包括:从所述目标区域地图中确定出一组待匹配栅格单元,其中,所述目标区域地图为栅格地图,所述一组待匹配栅格单元中的每个待匹配栅格单元为所述目标区域地图中允许所述移动机器人进入的栅格单元;将所述第一点云数据与所述每个待匹配栅格单元对应的点云数据进行点云匹配,得到所述一组候选位姿。
9、在一个示例性实施例中,所述方法还包括:确定多个候选移动方向,其中,所述多个候选移动方向中的每个候选移动方向为所述移动机器人在所述第一位置所允许的移动方向;从所述多个候选移动方向中选取对应的点云数据量最大的移动方向,得到目标移动方向;控制所述移动机器人沿着所述目标移动方向进行移动,直到所述第二位置。
10、根据本技术实施例的另一个方面,提供了一种机器人重定位装置,包括:匹配单元,用于将移动机器人在第一位置采集到的第一点云数据与目标区域地图进行点云匹配,得到一组候选位姿;第一获取单元,用于获取所述移动机器人行进至第二位置采集到的第二点云数据;更新单元,用于使用目标位姿参数对所述一组候选位姿进行更新,得到一组更新位姿,其中,所述目标位姿参数用于表示所述移动机器人由所述第一位置移动到所述第二位置所发生的位姿变化;重定位单元,用于使用所述第二点云数据和所述一组更新位姿对所述移动机器人进行重定位。
11、在一个示例性实施例中,所述装置还包括:第二获取单元,用于根据以下方式获取所述移动机器人的所述目标位姿参数:通过所述移动机器人上的目标里程计获取所述移动机器人由所述第一位置到所述第二位置所产生的里程增量,得到目标里程信息,其中,所述目标位姿参数包括所述目标里程信息。
12、在一个示例性实施例中,所述重定位单元包括:第一确定模块,用于确定所述目标区域地图中与所述一组更新位姿中的每个更新位姿对应的点云数据;重定位模块,根据所述每个更新位姿对应的点云数据和所述第二点云数据的匹配度,对所述移动机器人进行重定位。
13、在一个示例性实施例中,所述重定位模块包括:执行子模块,用于依次对所述每个更新位姿执行以下操作,直到满足校验停止条件,其中,在执行以下操作的过程中,所述每个更新位姿为当前更新位姿,所述校验停止条件包括以下至少之一:所述移动机器人重定位成功,所有更新位姿均已完成校验:第一确定子模块,用于在所述当前更新位姿对应的点云数据和所述第二点云数据的匹配度大于或者等于匹配度阈值的情况下,确定对所述当前更新位姿校验通过,其中,所述移动机器人重定位到的位姿为所述当前更新位姿;第二确定子模块,用于在所述当前更新位姿对应的点云数据和所述第二点云数据的匹配度小于匹配度阈值的情况下,确定对所述当前更新位姿校验未通过,其中,所述移动机器人重定位到的位姿不是所述当前更新位姿。
14、在一个示例性实施例中,所述重定位模块包括:第三确定子模块,用于将所述一组更新位姿中,对应的点云数据与第二点云数据的匹配度最高、且大于或者等于匹配度阈值的更新位姿,确定为所述移动机器人重定位到的位姿。
15、在一个示例性实施例中,所述匹配单元包括:第二确定模块,用于从所述目标区域地图中确定出一组待匹配栅格单元,其中,所述目标区域地图为栅格地图,所述一组待匹配栅格单元中的每个待匹配栅格单元为所述目标区域地图中允许所述移动机器人进入的栅格单元;匹配模块,用于将所述第一点云数据与所述每个待匹配栅格单元对应的点云数据进行点云匹配,得到所述一组候选位姿。
16、在一个示例性实施例中,所述装置还包括:确定单元,用于确定多个候选移动方向,其中,所述多个候选移动方向中的每个候选移动方向为所述移动机器人在所述第一位置所允许的移动方向;选取单元,用于从所述多个候选移动方向中选取对应的点云数据量最大的移动方向,得到目标移动方向;控制单元,用于控制所述移动机器人沿着所述目标移动方向进行移动,直到所述第二位置。
17、根据本技术实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述机器人重定位方法。
18、根据本技术实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述的机器人重定位方法。
19、在本技术实施例中,采用先基于点云匹配确定候选解、再通过进行短暂探索候选解进行筛选的方式,将移动机器人在第一位置采集到的第一点云数据与目标区域地图进行点云匹配,得到一组候选位姿;获取移动机器人行进至第二位置采集到的第二点云数据;使用目标位姿参数对一组候选位姿进行更新,得到一组更新位姿,其中,目标位姿参数用于表示移动机器人由第一位置移动到第二位置所发生的位姿变化;使用第二点云数据和一组更新位姿对移动机器人进行重定位,由于在机器人进行重定位的过程中,首先基于点云数据筛选出多个候选位姿(即,候选解),然后在控制机器人移动一段距离之后(即,短暂探索),基于发生的位姿变化更新候选位姿,并通过在移动到的位置所采集到的点云数据对候选位姿进行校验,从而对机器人进行重定位,通过进行短暂探索,对重定位的候选解进行筛选,可以实现降低出现误匹配的情况的目的,达到提高机器人重定位的准确性的技术效果,进而解决了相关技术中的机器人重定位方法存在由于易出现误匹配的情况导致的机器人重定位的准确性低的问题。
- 还没有人留言评论。精彩留言会获得点赞!