一种数据驱动的流固耦合系统非线性降阶预测方法及装置
1.本发明涉及一种数据驱动的流固耦合系统非线性降阶预测方法及装置,该方法可以鲁棒,精确地对复杂流固耦合系统进行降阶并预测,属于复杂系统建模与预测领域。
背景技术:
2.流固耦合系统是一种非常常见的多物理场耦合系统,广泛存在于航空工程、海洋船舶、土木工程等实际应用领域。不同物理场之间相互作用,相互影响,从而产生了非常复杂且具有高度非线性的物理现象。例如:飞机机翼颤振问题,舰船流体、桨、轴系间耦合振动问题,高层建筑或者桥梁风致振动问题等等。1940年,美国塔科马悬索桥在低速风激励下发生颤振失稳而倒塌的事件引起了研究人员对流固耦合导致结构破坏问题的广泛关注。随后,冯
·
卡门证明了该事故主要的原因是涡致振动(vortex-induced vibration,viv)。
3.涡致振动通过流体在结构表面交替产生脱落涡,该时变脱落涡与结构固有特性之间相互响应,会降低钝体结构的稳定性甚至引发结构疲劳损伤。特别是当旋涡的脱落频率与结构固有频率非常接近时会产生锁定现象(lock-in),从而导致结构振幅会大幅度增加,使得结构疲劳失效,严重威胁到结构的稳定和安全,甚至会对结构体产生极大破坏。因此,对涡致振动现象的建模和预测在基础和应用研究中均有着重要的意义。
4.由于流固耦合系统非常复杂,早期对流固耦合系统的建模和预测主要是基于半经验模型,其中比较具有代表性的是尾流-振子耦合模型。这类模型由于诸多假设条件,因此仅限用于较大振动幅值中。半经验公式的局限性使我们迫切需要发展一套高效地基于cfd的流固耦合建模方法。而降阶建模技术是将高维、高精度模型投影到低维降阶空间中,从而通过捕捉复杂高维系统的主导动力学特征来极大地降低了高维、高精度模型的计算复杂度。因此,降阶模型即可以提供较高的精确度,而且适用性也更加广泛。
5.目前传统的降阶模型主要有:本征正交分解(pod)和动态模态分解(dmd)。其中,pod通过对流场数据进行正交分解可以得到该流场包含不同能量的模态,较大的能量模态表征了流动的主导特征。而dmd是将该流动系统视作一个线性动力学系统,通过对该线性动力学系统的状态矩阵进行奇异值分解,可以得到一组有一定频率和增长率的动力学模态。但是这两种降阶模型都是线性的,很难推广应用到复杂多物理场、多尺度等耦合系统中。
技术实现要素:
6.本发明针对现有流固耦合系统降阶建模和预测的局限性,提出了一种新型数据驱动的流固耦合系统非线性降阶预测方法。该发明将流固耦合系统的流体流动部分和振动响应部分分开建模。对于流体流动,首先通过vcae将高维流场投影到低维空间中。随后利用sindy算法对时序演化的低维表示进行稀疏辨识,得到该低维空间的非线性动力学方程。最后,通过所辨识的动力学方程和vcae的解码器即可预测该流固耦合系统在未来任一时刻的流场状态信息。对于结构响应,则直接利用sindy算法对时序演化的结构响应量(位移、速度、升力)进行稀疏辨识,所辨识到的非线性动力学方程可直接预测该流固耦合系统在未来
任一时刻的结构响应状态。该方法实现简单,精度高,通用性强,更加适合工程应用。相比较传统方法,本发明提出的方法具有鲁棒性和准确性更好。同时本发明还具有良好的通用性和可扩展性。
7.为了达到上述目的,本发明采用的技术方案如下:
8.一种新型数据驱动的流固耦合系统非线性降阶预测方法,该方法对流固耦合系统的流体流动部分和结构响应部分分别进行建模,包括:
9.通过数值模拟得到流固耦合系统在不同时刻的流场数据和结构响应数据,将流场数据映射到均匀的笛卡尔坐标上,构建得到流场数据集x和结构响应数据集a;
10.构建一深度神经网络,该网络由编码器和解码器组成,其中编码器用于将高维流场数据降维获得其低维表示z,解码器用于将低维表示z投影回高维流场;
11.使用流场数据集x中的样本对所述深度神经网络进行训练,获得训练好的深度神经网络;并利用训练好的深度神经网络的编码器获得流场数据集x中每个样本的低维表示z;
12.使用sindy算法分别对所有样本的低维表示z和结构响应数据集a中的样本进行稀疏辨识,分别得到表征流体流动的动力学方程和结构响应的动力学方程
13.对表征流体流动的动力学方程进行积分获得未来任意时刻所述流固耦合系统的流体流动状态的低维表示预测值,并利用训练好的深度神经网络的解码器对低维表示预测值进行解码获得未来任意时刻所述流固耦合系统的流体流动状态预测值;对表征结构响应的动力学方程进行积分获得未来任意时刻所述流固耦合系统的结构响应预测值。
14.进一步地,所述流场数据集的每个样本为二维流场数据(二维空间中每个点的流场数据),对于三维流场数据(三维空间中每个点的流场数据),将三维流场数据在展向上进行均分成多份,每份作为独立的流场数据集,分别构建和训练对应的深度神经网络。
15.进一步地,所述结构响应数据包括结构位移、速度和/或升力。
16.进一步地,所述流固耦合系统为柔性圆柱涡致振动系统或者机翼颤振系统等。
17.进一步地,使用sindy算法分别对所有样本的低维表示z和结构响应数据集a中的样本进行稀疏辨识,分别得到表征流体流动的动力学方程和结构响应的动力学方程具体包括如下子步骤:
18.对所有样本的低维表示z和结构响应数据集a中的样本分别表示成m
×
n的矩阵,其中m表示流场数据和结构响应数据采集的时间采样数量,n表示样本的维度;
19.对矩阵求数值微分得到其导数矩阵;
20.基于矩阵建立一个备选非线性函数集;
21.将动力学方程表征为备选非线性函数集与一稀疏系数向量的积,通过回归求解稀疏系数向量获得动力学方程。
22.进一步地,所述备选非线性函数集为常数、多项式、三角函数中的一种或几种组合。
23.一种流固耦合系统非线性降阶预测装置,所述装置基于上述任一项所述数据驱动的流固耦合系统非线性降阶预测方法实现,包括:
24.数据获取模块,用于通过数值模拟得到流固耦合系统在不同时刻的流场数据和结构响应数据,将流场数据映射到均匀的笛卡尔坐标上,构建得到流场数据集x和结构响应数据集a;
25.训练模块,用于构建一深度神经网络,该网络由编码器和解码器组成,其中编码器用于将高维流场数据降维获得其低维表示z,解码器用于将低维表示z投影回高维流场;
26.使用流场数据集x中的样本对所述深度神经网络进行训练,获得训练好的深度神经网络;并利用训练好的深度神经网络的编码器获得流场数据集x中每个样本的低维表示z;
27.动力学方程构建模块,用于使用sindy算法分别对所有样本的低维表示z和结构响应数据集a中的样本进行稀疏辨识,分别得到表征流体流动的动力学方程和结构响应的动力学方程
28.预测模块,用于对表征流体流动的动力学方程进行积分获得未来任意时刻所述流固耦合系统的流体流动状态的低维表示预测值,并利用训练好的深度神经网络的解码器对低维表示预测值进行解码获得未来任意时刻所述流固耦合系统的流体流动状态预测值;对表征结构响应的动力学方程进行积分获得未来任意时刻所述流固耦合系统的结构响应预测值。
29.本发明的有益效果为:
30.1.本发明提出了一种新型基于深度学习的非线性降阶模型,对复杂非线性流固耦合系统可以捕捉到更多潜在流动信息,因此相较于传统降阶模型具有更好的降维和重构效果。
31.2.通过采用数据驱动的sindy算法对降阶空间和振动响应进行稀疏辨识,本发明提供的方法,相较于已有的方法,不仅提升了模型的预测精度和适用范围,还可以得到该流固耦合系统的潜在动力学控制方程,基于所辨识到的方程,可进一步进行一些物理机理的研究。
附图说明
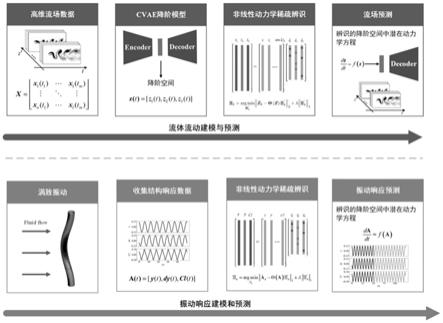
32.图1为本发明的方法框架图;
33.图2为神经网络cvae模型结构图;
34.图3为三维流场预测结果与直接数值模拟对比图;
35.图4为结构振动响应预测结果图。
具体实施方式
36.下面结合附图对本发明进行详细的描述。
37.本实施例为雷诺数re=100下的三维柔性圆柱涡致振动系统。圆柱长12.56m,直径为1m。该流场的尾迹为一个充分发展的涡量场,圆柱仅在y方向(垂直于来流方向)自由振动。
38.本发明提供的一种新型数据驱动的流固耦合系统非线性降阶预测方法,如图1所示,本发明将流固耦合系统的流体流动和振动响应分开建模,该方法具体包括:
39.步骤s1:通过谱元法求解n-s方程和弹簧结构方程直接数值模拟得到流场(涡量场)数据,由于该系统是三维的,在该实例中,将该三维模型在展向上均分32份,每一份为包括x,y坐标的二维数据,将32组二维数据分别映射到均匀的笛卡尔坐标上,本实例中,将流场数据映射到200
×
200的笛卡尔坐标上,坐标范围为(x,y)=[-5,20]
×
[-5,5],选取的流场时间序列的间隔为δt=5
×
10-2
,训练数据集采用1000个时间切片,构建所需要的32份流场数据集x=[x];同时采集1000个时间步,时间步长为δt=5
×
10-2的结构响应(位移,速度和升力)数据构造结构响应数据集a;
[0040]
步骤s2,构建一个深度神经网络,该网络由两组结构类似的卷积神经网络组成:编码器和解码器编码器用于将高维流场数据样本x降维获得其低维表示z,解码器用于将低维投影回高维流场如图2所示。本实例设置降维空间中低维表示维度为3,采用的深度神经网络为过卷积变分自编码器(vcae),具体模型参数如下表所示:
[0041][0042][0043]
步骤s3,使用流场数据集x对cvae深度神经网络进行训练,该神经网络训练的最优参数w可由优化问题:高维流场与其对应的高维流场数据样本x的误差获得,误差可以通过均方误差、等表示,本实施例中采用l2范数,优化问题具体表示为:其中,训练好的网络即可从编码器的输出得到该流固耦合系统中每个高维流场数据样本x流体流动的低维表示z,在该实施例中,由于三维系统在展向均分为了32组,每一组都需要训练cvae深度神经网络,故共训练了32个cvae深度神经网络模型。
[0044]
步骤s4,使用sindy算法分别对该流固耦合系统中流体流动的低维表示z和结构响应a进行稀疏辨识,分别得到表征流体流动的动力学方程和结构响应的动力学方程
[0045]
该步骤具体包括如下子步骤:
[0046]
步骤s4.1,将步骤s1得到的结构振动响应数据集a或者步骤s3得到的流动低维表示z按分别表示成m
×
n的矩阵:
[0047][0048]
其中,y表示结构振动响应数据集a或所有样本的流动低维表示z的集合,y表示对应结构振动响应数据集a中的样本或流动低维表示z,m表示流场数据和结构响应数据采集的时间采样数量,m表示样本的维度;
[0049]
在该实施例中:低维表示的维度n为3,结构响应数据的维度n也为3,时间采样数量m为1000;
[0050]
步骤s4.2,对上述矩阵求数值微分得到其导数矩阵:
[0051][0052]
步骤s4.3,基于观测状态变量矩阵y建立一个备选非线性函数集:
[0053][0054]
其中,备选非线性函数集θ(y)可以为常数、多项式、三角函数等,也可以是这些不同类型函数的组合。在该实施例中,选取3阶多项式和2阶三角函数作为备选非线性函数集。
[0055]
步骤s4.4,将动力学方程表征为备选非线性函数集与一稀疏系数向量的积;
[0056][0057]
其中,稀疏系数向量ξ用来定义哪一项函数项将被激活。稀疏系数向量ξ可以定义为一个稀疏回归问题,该稀疏回归问题如下:
[0058][0059]
其中,||
·
||1和||
·
||2分别表示l1范数和l2范数,λ表示权重;
[0060]
回归求解获得稀疏系数向量ξ后,代入动力学方程表示,即可获得对应的表征流体
流动的动力学方程和结构响应的动力学方程
[0061]
在该实施例中,由于三维系统的流场数据在展向均分为了32组,每一组也都要稀疏辨识,共得到了32组表征流体流动的非线性动力学方程。
[0062]
步骤s5,一旦辨识出两组动力学方程和则该流固耦合系统在未来任意时刻的流体流动状态即可通过方程和cvae深度神经网络的解码器部分预测得到:
[0063]
对未来任意时刻t’,对表征流体流动的动力学方程进行积分获得未来任意时刻t’所述流固耦合系统的流体流动状态的低维表示预测值并利用训练好的深度神经网络的解码器对低维表示预测值进行解码获得未来任意时刻t’所述流固耦合系统的流体流动状态预测值。
[0064]
而该流固耦合系统在任意时刻的结构响应可直接对方程积分而预测得到:
[0065]
对未来任意时刻t’,对表征结构响应的动力学方程进行积分获得未来任意时刻所述流固耦合系统的结构响应预测值
[0066]
本实例对该涡致振动系统的三维流场预测结果如图3所示,可以看出在t=99.95s(训练集之外),预测的涡量场与高精度数值模拟的结构非常接近。同时该涡致振动系统的结构振动预测结果如图4所示。由图4可得,虽然随着时间的推移,模型预测的误差稍许增大,但是最大误差也在0.06以下,该误差是在可接受的范围内。图3和图4说明本发明提供的方法可以精确地对复杂三维涡致振动系统流场状态和结构响应,该结果具有较高的可信度,因此本发明可为复杂物理场结构失效的预测提供有效的模型支撑。
[0067]
与前述一种数据驱动的流固耦合系统非线性降阶预测方法的实施例相对应,本发明还提供了一种数据驱动的流固耦合系统非线性降阶预测装置的实施例。该装置基于前述新型数据驱动的流固耦合系统非线性降阶预测方法实现,包括:
[0068]
数据获取模块,用于通过数值模拟得到流固耦合系统在不同时刻的流场数据和结构响应数据,将流场数据映射到均匀的笛卡尔坐标上,构建得到流场数据集x和结构响应数据集a;
[0069]
训练模块,用于构建一深度神经网络,该网络由编码器和解码器组成,其中编码器用于将高维流场数据降维获得其低维表示z,解码器用于将低维投影回高维流场;
[0070]
使用流场数据集x中的样本对所述深度神经网络进行训练,获得训练好的深度神经网络;并利用训练好的深度神经网络的编码器获得流场数据集x中每个样本的低维表示z;
[0071]
动力学方程构建模块,用于使用sindy算法分别对所有样本的低维表示z和结构响应数据集a中的样本进行稀疏辨识,分别得到表征流体流动的动力学方程和结构
响应的动力学方程
[0072]
预测模块,用于对表征流体流动的动力学方程进行积分获得未来任意时刻所述流固耦合系统的流体流动状态的低维表示预测值,并利用训练好的深度神经网络的解码器对低维表示预测值进行解码获得未来任意时刻所述流固耦合系统的流体流动状态预测值;对表征结构响应的动力学方程进行积分获得未来任意时刻所述流固耦合系统的结构响应预测值。
[0073]
对于装置实施例而言,由于其基本对应于方法实施例,所以相关之处参见方法实施例的部分说明即可。以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本发明方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0074]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化或变动。这里无需也无法把所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1