基于混合正则化策略的非线性结构冲击激励载荷识别方法
1.本发明属于非线性结构载荷识别与振动分析技术领域,涉及基于混合正则化策略的非线性结构冲击激励载荷识别方法。
背景技术:
2.随着机械装备运行性能要求以及结构复杂性的提高,尤其是对于先进轨道交通装备、海洋工程装备、航空航天装备等领域,机械装备中的非线性因素越来越受到人们的重视。此外,冲击激励载荷是机械设备中普遍存在的一类动载荷,作用在机械装备关键结构上的冲击激励载荷是对结构进行优化设计、可靠性分析、振动控制以及状态评估的关键指标,在不清楚结构的受到的冲击激励载荷作用情况下对上述问题的研究都带有一定的盲目性。然而,考虑到传感测量技术以及安装空间的限制,对于大多数机械结构,很难通过合适的传感器直接测量结构所受的冲击激励载荷。因此,研究冲击激励载荷作用下非线性机械结构的载荷识别方法具有重要的学术意义和工程价值。针对机械结构载荷识别的研究主要集中在线性结构上,即利用各类正则化方法解决在线性框架下建立的传递方程的不适定性问题,从而利用方便测量的结构振动响应反演得到待获取的载荷。
3.目前,逐渐有学者将传统的l2范数正则化方法推广到了非线性结构的简谐激励载荷识别中。然而,当激励载荷作用于非线性结构时,结构中包含的非线性因素会在非线性结构振动响应的作用下产生非线性力,使得激励载荷和非线性力可以一起视作扩展力作用在非线性结构上。当非线性结构的激励载荷为冲击激励载荷时,虽然冲击激励载荷具有稀疏性,但是由结构振动响应和非线性因素引起的非线性力通常不具有稀疏性,即作用在非线性结构上的扩展力不具有稀疏性。因此,无法直接利用l1范数稀疏正则化方法实现冲击激励载荷作用下的非线性结构的载荷识别。
技术实现要素:
4.本发明的目的是提供基于混合正则化策略的非线性结构冲击激励载荷识别方法,解决了现有技术中直接利用l1范数稀疏正则化方法导致的识别精度低、结果不稳定的问题。
5.本发明所采用的技术方案是,基于混合正则化策略的非线性结构冲击激励载荷识别方法,具体按照以下步骤实施:
6.步骤1,获取非线性机械结构中冲击激励位置与振动响应测点位置间的传递矩阵;
7.步骤2,测量待识别的冲击激励载荷作用下非线性机械结构的振动响应;
8.步骤3,构建稀疏表征模型;
9.步骤4,利用凸优化算法求解步骤3构建的稀疏表征模型,得到作用于非线性机械结构上的扩展力;
10.步骤5,从扩展力中提取冲击激励载荷和非线性力峰值信息;
11.步骤6,依据步骤5中得到的冲击激励载荷构建非线性响应传递方程,通过l2范数
正则化方法对非线性响应传递方程进行求解,得到非线性力的缓变趋势信息。
12.本发明的特点还在于
13.步骤1具体按照以下步骤实施:
14.步骤1.1,获取冲击激励位置与振动响应测点位置之间状态空间模型的系数矩阵ad、bd、cd和dd。
15.步骤1.2,依据步骤1.1获取的系数矩阵组装扩展力f
ex
(t)与振动响应测点间的总体传递矩阵tn,扩展力f
ex
(t)包含冲击激励载荷f(t)和非线性力f
nl
(t),并从总体传递矩阵tn中提取冲击激励位置与振动响应测点间的传递矩阵t
rf
,以及非线性力位置与振动响应测点间的传递矩阵t
rnl
;
16.步骤1.2中,扩展力f
ex
(t)与振动响应测点间的总体传递矩阵tn的组装规则如下:
[0017][0018]
其中,n表示振动响应的采样点总数,传递矩阵t
rf
依据冲击激励载荷f(t)在扩展力中的空间位置逐列从总体传递矩阵tn中提取得到,传递矩阵t
rnl
依据非线性力f
nl
(t)在扩展力中的空间位置逐列从总体传递矩阵tn中提取得到;
[0019]
冲击激励载荷f(t)和非线性力f
nl
(t)在扩展力中的空间位置如下:
[0020]fex
(t)={[f(0)f
nl
(0)]
t
[f(1)f
nl
(1)]
t
...[f(n-1)f
nl
(n-1)]
t
}
t
(2)
[0021]
公式(2)中,上标t表示转置运算。
[0022]
步骤2中,振动响应测点位置与步骤1中振动响应测点位置一致,非线性机械结构的振动响应通过振动传感器测量得到。
[0023]
步骤3中,稀疏表征模型为:
[0024][0025][0026]
其中,g(α)为目标函数,y表示测量的非线性机械结构的振动响应,λ为稀疏正则化参数,φi(t)表示三次b样条函数,αi表示稀疏表征系数,φ=[φ1,φ2,...,φn]表示由三次b样条函数构成的字典矩阵,α=[α1,α2,...,αn]
t
表示待求解的稀疏表征系数。
[0027]
步骤4中,采用的凸优化算法为两步迭代阈值算法,对步骤3中的稀疏表征模型求解得到稀疏表征系数α,再通过关系式f
ex
(t)=φα得到扩展力f
ex
(t)。
[0028]
步骤5中,依据步骤4中识别得到的扩展力f
ex
(t),结合冲击激励载荷以及非线性力在扩展力中的空间位置,得到冲击激励载荷f(t)和非线性力得到的冲击激励载荷f(t)作为非线性机械结构冲击激励载荷的识别结果,得到的非线性力作为反映非线性力峰值信息的识别结果。
[0029]
步骤6具体按照以下步骤实施:
[0030]
步骤6.1,从测量的非线性机械结构振动响应中提取仅由非线性力引起的非线性响应y
nl
;
[0031]
非线性响应y
nl
的提取公式为:
[0032]ynl
=y-t
rffnl
(t)(5);
[0033]
步骤6.2,确定非线性响应的非零区间[j0,js];
[0034]
所述步骤6.2中通过非线性响应y
nl
的幅值,确定非零幅值在非线性响应中的位置区间[j0,js];
[0035]
步骤6.3,依据非零区间[j0,js]对非线性响应y
nl
和传递矩阵t
rnl
进行缩减;
[0036]
步骤6.4,构建非线性响应传递方程;
[0037]
构建的非线性力响应传递方程为:
[0038][0039]
其中,f
nl_re
(t)为缩减的非线性力,f
nl_re
(t)仅包含了原始非线性力f
nl
(t)的第j0个值到js个值。
[0040]
步骤6.5,利用l2范数吉洪诺夫正则化方法求解得到非线性力缓变趋势信息。
[0041]
步骤6.3中依据非零区间[j0,js],仅保留非线性响应y
nl
的第j0个值到js个值得到缩减的非线性响应向量y
nl_re
,仅保留非线性力与振动响应测点间的传递矩阵t
rnl
的第j0列值到js列值得到缩减的传递矩阵
[0042]
步骤6.5中,利用l2范数吉洪诺夫正则化方法对步骤6.4构建的非线性响应传递方程进行求解,得到缩减的非线性力识别结果再依据非零区间[j0,js]通过补充0元素的方式得到完整的非线性力的方式得到完整的非线性力作为反映非线性力缓变趋势信息的识别结果,与步骤5中得到的反映非线性力峰值信息的识别结果结合,完整的反映冲击激励载荷作用下非线性机械结构所产生的非线性力的完整信息。
[0043]
步骤1.1中,振动响应测点位置包含非线性位置,振动响应测点数量等于非线性因素数量与冲击激励数量之和,状态空间模型的系数矩阵ad、bd、cd和dd通过低激励水平下的振动测试结合子空间识别方法来获取,或是通过建立非线性机械结构去除非线性因素后的基础线性结构的有限元模型来获取。
[0044]
本发明的有益效果是:本发明充分利用非线性机械结构的振动特征,将l1范数稀疏正则化方法与l2范数吉洪诺夫正则化方法结合,解决了冲击激励载荷作用下非线性机械结构的载荷识别精度低、结果不稳定的问题;不仅能实现非线性机械结构的冲击激励载荷的识别,还能准确获取非线性力的峰值信息和缓变趋势信息,为监测结构非线性因素的状态提供基础;通过非线性振动响应的非零幅值信息进行模型缩减,极大的降低了传递矩阵逆运算的规模,具有计算效率高的优点;本发明适用性好,不受非线性位置、非线性种类以及冲击激励位置等的限制。
附图说明
[0045]
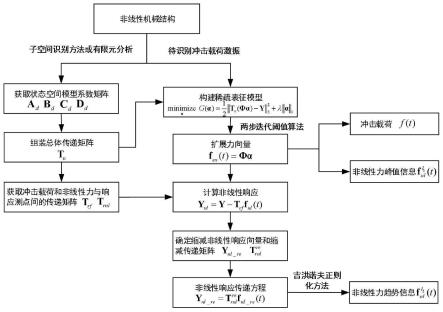
图1是本发明基于混合正则化策略的非线性结构冲击激励载荷识别方法的流程图;
[0046]
图2是本发明一个实施例中含间隙非线性悬臂梁系统的冲击载荷识别结果示意图;
[0047]
图3是本发明一个实施例中含间隙非线性悬臂梁系统的非线性力峰值信息识别结果示意图;
[0048]
图4是本发明一个实施例中含间隙非线性悬臂梁系统的非线性力缓变趋势信息识别结果示意图。
具体实施方式
[0049]
下面结合附图和具体实施方式对本发明进行详细说明。
[0050]
本发明基于混合正则化策略的非线性结构冲击激励载荷识别方法的流程图,如图1所示,具体按照以下步骤实施:
[0051]
步骤1,获取非线性机械结构中冲击激励位置与振动响应测点位置间的传递矩阵;
[0052]
步骤1具体按照以下步骤实施:
[0053]
步骤1.1,获取冲击激励位置与振动响应测点位置之间状态空间模型的系数矩阵ad、bd、cd和dd。
[0054]
步骤1.1中,振动响应测点位置包含非线性位置,振动响应测点数量等于非线性因素数量与冲击激励数量之和,状态空间模型的系数矩阵ad、bd、cd和dd通过低激励水平下的振动测试结合子空间识别方法来获取,或是通过建立非线性机械结构去除非线性因素后的基础线性结构的有限元模型来获取。
[0055]
步骤1.2,依据步骤1.1获取的系数矩阵组装扩展力f
ex
(t)与振动响应测点间的总体传递矩阵tn,扩展力f
ex
(t)包含冲击激励载荷f(t)和非线性力f
nl
(t),并从总体传递矩阵tn中提取冲击激励位置与振动响应测点间的传递矩阵t
rf
,以及非线性力位置与振动响应测点间的传递矩阵t
rnl
;
[0056]
步骤1.2中,扩展力f
ex
(t)与振动响应测点间的总体传递矩阵tn的组装规则如下:
[0057][0058]
其中,n表示振动响应的采样点总数,传递矩阵t
rf
依据冲击激励载荷f(t)在扩展力中的空间位置逐列从总体传递矩阵tn中提取得到,传递矩阵t
rnl
依据非线性力f
nl
(t)在扩展力中的空间位置逐列从总体传递矩阵tn中提取得到;
[0059]
冲击激励载荷f(t)和非线性力f
nl
(t)在扩展力中的空间位置如下:
[0060]fex
(t)={[f(0)f
nl
(0)]
t
[f(1)f
nl
(1)]
t
...[f(n-1)f
nl
(n-1)]
t
}
t
(2)
[0061]
公式(2)中,上标t表示转置运算。
[0062]
步骤2,测量待识别的冲击激励载荷作用下非线性机械结构的振动响应;
[0063]
步骤2中,振动响应测点位置与步骤1中振动响应测点位置一致,非线性机械结构的振动响应通过振动传感器测量得到。
[0064]
步骤3,构建稀疏表征模型,用于非线性机械结构扩展力识别;
[0065]
步骤3中,稀疏表征模型为:
[0066][0067][0068]
其中,g(α)为目标函数,y表示测量的非线性机械结构的振动响应,λ为稀疏正则化
参数,φi(t)表示三次b样条函数,αi表示稀疏表征系数,φ=[φ1,φ2,...,φn]表示由三次b样条函数构成的字典矩阵,α=[α1,α2,...,αn]
t
表示待求解的稀疏表征系数。
[0069]
步骤4,利用凸优化算法求解步骤3构建的稀疏表征模型,得到作用于非线性机械结构上的扩展力;
[0070]
步骤4中,采用的凸优化算法为两步迭代阈值算法,对步骤3中的稀疏表征模型求解得到稀疏表征系数α,再通过关系式f
ex
(t)=φα得到扩展力f
ex
(t)。
[0071]
步骤5,从扩展力中提取冲击激励载荷和非线性力峰值信息;
[0072]
步骤5中,依据步骤4中识别得到的扩展力f
ex
(t),结合冲击激励载荷以及非线性力在扩展力中的空间位置,得到冲击激励载荷f(t)和非线性力得到的冲击激励载荷f(t)作为非线性机械结构冲击激励载荷的识别结果,得到的非线性力作为反映非线性力峰值信息的识别结果。
[0073]
步骤6,依据步骤5中得到的冲击激励载荷构建非线性响应传递方程,通过l2范数正则化方法对非线性响应传递方程进行求解,得到非线性力的缓变趋势信息。
[0074]
步骤6具体按照以下步骤实施:
[0075]
步骤6.1,从测量的非线性机械结构振动响应中提取仅由非线性力引起的非线性响应y
nl
;
[0076]
非线性响应y
nl
的提取公式为:
[0077]ynl
=y-t
rffnl
(t)(5);
[0078]
步骤6.2,确定非线性响应的非零区间[j0,js];
[0079]
通过非线性响应y
nl
的幅值,确定非零幅值在非线性响应中的位置区间[j0,js]。
[0080]
步骤6.3,依据非零区间[j0,js]对非线性响应y
nl
和传递矩阵t
rnl
进行缩减;
[0081]
依据非零区间[j0,js],仅保留非线性响应y
nl
的第j0个值到js个值得到缩减的非线性响应向量y
nl_re
,仅保留非线性力与振动响应测点间的传递矩阵t
rnl
的第j0列值到js列值得到缩减的传递矩阵
[0082]
步骤6.4,构建非线性响应传递方程;
[0083]
构建的非线性力响应传递方程为:
[0084][0085]
其中,f
nl_re
(t)为缩减的非线性力,f
nl_re
(t)仅包含了原始非线性力f
nl
(t)的第j0个值到js个值。
[0086]
步骤6.5,利用l2范数吉洪诺夫正则化方法求解得到非线性力缓变趋势信息;
[0087]
步骤6.5中,利用l2范数吉洪诺夫正则化方法对步骤6.4构建的非线性响应传递方程进行求解,得到缩减的非线性力识别结果再依据非零区间[j0,js]通过补充0元素的方式得到完整的非线性力的方式得到完整的非线性力作为反映非线性力缓变趋势信息的识别结果,与步骤5中得到的反映非线性力峰值信息的识别结果结合,完整的反映冲击激励载荷作用下非线性机械结构所产生的非线性力的完整信息。
[0088]
在本发明基于混合正则化策略的非线性结构冲击激励载荷识别方法中,通过低激励水平下的振动测试结合子空间识别方法或通过建立非线性机械结构去除非线性因素后
的基础线性结构的有限元模型获取非线性机械结构的状态空间模型系数矩阵,组装激励位置与振动响应测点位置间的传递矩阵,并从中提取冲击激励载荷与振动响应测点间的传递矩阵,以及非线性力位置与振动响应测点间的传递矩阵。
[0089]
利用传感器测量待识别冲击激励载荷作用下非线性机械结构的振动响应,构建稀疏表征模型,并通过两步迭代阈值算法得到扩展力,从中提取得到冲击激励载荷和非线性力,提取得到的冲击激励载荷作为非线性机械结构冲击载荷的识别结果,提取得到的非线性力作为反映非线性力峰值信息的识别结果。利用得到的冲击激励载荷计算仅由非线性力引起的非线性响应,结合非线性响应的非零区间,构建非线性响应传递方程,通过吉洪诺夫正则化方法得到反映非线性力缓变趋势信息的识别结果。
[0090]
实施例
[0091]
利用本发明基于混合正则化策略的非线性结构冲击激励载荷识别方法,进行仿真验证,以含间隙非线性的悬臂梁模型为例,冲击激励载荷幅值和加载时间为30n和0.2s,悬臂梁长度l=1m,冲击激励载荷作用位置lf=0.2m,间隙非线性作用位置lc=0.8m。通过本发明基于混合正则化策略的非线性结构冲击激励载荷识别方法,非线性结构的冲击激励载荷识别结果,如图2所示,冲击激励载荷识别值在冲击非加载区域趋于0,在冲击加载区域与冲击激励载荷的理论值接近。因此本发明能够准确的实现非线性机械结构冲击激励载荷的识别。间隙非线性力的峰值信息识别结果,如图3所示,从图3中的局部放大图可以看出,非线性力识别值的峰值与对应的理论值接近,但是在非线性力曲线变化缓慢的部分存在差异。间隙非线性力的缓变趋势信息,如图4所示,图4给出的结果可以看出在非线性力曲线变化缓慢的部分,识别结果与理论结果的吻合度较好。因此,结合反映非线性力峰值信息的图3以及反映非线性力缓变趋势信息的图4来实现非线性力完整信息的准确观测。
[0092]
本发明充分利用非线性机械结构的振动特征,将l1稀疏正则化方法与l2正则化方法结合,对冲击激励载荷作用下非线性机械结构进行冲击激励载荷和非线性力识别,识别结果准确,不仅能实现非线性机械结构的冲击激励载荷的识别,还能准确获取非线性力的峰值信息和缓变趋势信息,有助于了解非线性机械结构振动产生以及传递机制,为机械结构的优化设计以及状态监测奠定基础。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1