一种用于自动驾驶系统的HARA量化分析的方法及系统与流程
一种用于自动驾驶系统的hara量化分析的方法及系统
技术领域
1.本发明涉及一种用于自动驾驶系统的hara量化分析的方法及系统。
背景技术:
2.自动驾驶技术正在经历快速蓬勃的发展,国内外的大小汽车厂商、零部件供应商、解决方案提供商都在积极开展l2/l3/l4自动驾驶开发。自动驾驶汽车相比于传统汽车,其包含更复杂的电子电气架构和更多的控制器种类及数量,因此更容易引起由于电子电气故障而产生的危害,而功能安全旨在通过安全机制来将危害的风险降低至可接受范围内。
3.iso26262是从电子电气及可编程器件功能安全标准iec61508派生而来的适用于汽车行业的标准,其通过hara(hazard analysis and risk assessment,危害分析及风险评估)及v模型设计架构,使功能安全需求等级得到一致性的分析结果,以利汽车电子系统之生命周期考虑到所需失效防止技术与管理要求,并借由设计开发、查证(verification)及确认(validation)等能力成熟度模型集成(cmmi-dev)流程加以实现,使得产品之功能安全符合所需汽车安全完整性等级(asil)。
4.现阶段hara中的严重度(severity)、暴露度(exposure)、可控性(control lability)的打分都是基于工程师的个人经验,不同工程师的hara分析结果存在一定差异,主观性较强。
5.现阶段hara通常由工程师根据自身经验完成,通过考虑系统功能在不同功能场景中的故障模式,依据主观感受对严重度(severity)、暴露度(exposure)、可控性(control lability)三个指标进行评级,并根据iso26262标准确定asil等级,对asil等级为a/b/c/d的条目提取整车安全目标,用于后续的安全分析。这种hara分析方法具有工作量大、容易遗漏场景、依赖工程师经验、评级主观性较强等缺陷。
6.hara分析通常涉及较多的子功能故障及功能场景,因此体量庞大,包含较多的条目。而现有hara分析是由人工进行撰写,工作量较大且可能存在遗漏条目的情况,影响安全目标的完整性。
技术实现要素:
7.本发明提供一种用于自动驾驶系统的hara量化分析的方法及系统。
8.本发明提供一种用于自动驾驶系统的hara量化分析的方法,所述方法包括:根据自动驾驶系统的功能定义相应的功能场景;基于所述功能场景得到对应的子功能及子功能所影响的车辆参数;分析得到所述子功能的故障模式,确定各个故障模式对应的车辆参数的变化幅度;定义hara量化分析的分级标准;根据所述功能场景构建测试用例;在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变
化幅度,以得到仿真结果;根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级。
9.进一步的,上述方法中,所示功能场景包括:道路类型、道路结构和道路条件,其中,所示道路类型包括:高速道路、城市道路、国道、隧道、高速匝道和桥梁道路;道路结构包括:直路和弯路;道路条件包括:干燥路面和由于积雪导致的湿滑路面。
10.进一步的,上述方法中,根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级之后,还包括:生成hara表格;基于所述hara量化分析表格提取自动驾驶系统的安全目标。
11.进一步的,上述方法中,所述hara量化分析表格包括:测试用例、故障模式及其对应的仿真结果的严重度、暴露度、可控性和asil的等级。
12.进一步的,上述方法中,定义hara量化分析的分级标准,包括:定义严重度、暴露度、可控性和asil的分级标准。
13.进一步的,上述方法中,根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级,包括:根据所述分级标准对仿真结果进行评级,确认仿真结果的严重度、暴露度、可控性和asil的等级。
14.根据本发明的另一方面,还提供一种用于自动驾驶系统的hara量化分析的系统,其中,该系统包括:第一模块,用于根据自动驾驶系统的功能定义相应的功能场景;第二模块,用于基于所述功能场景得到对应的子功能及子功能所影响的车辆参数;第三模块,用于分析得到所述子功能的故障模式,确定各个故障模式对应的车辆参数的变化幅度;第四模块,用于定义hara量化分析的分级标准;第五模块,用于根据所述功能场景构建测试用例;第六模块,用于在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以得到仿真结果;第七模块,用于根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级。
15.进一步的,上述系统中,所示功能场景包括:道路类型、道路结构和道路条件,其中,所示道路类型包括:高速道路、城市道路、国道、隧道、高速匝道和桥梁道路;道路结构包括:直路和弯路;道路条件包括:干燥路面和由于积雪导致的湿滑路面。
16.进一步的,上述系统中,还包括:第八模块,用于生成hara表格;基于所述hara量化分析表格提取自动驾驶系统的安全目标。
17.进一步的,上述系统中,所述hara量化分析表格包括:测试用例、故障模式及其对应的仿真结果的严重度、暴露度、可控性和asil的等级。
18.进一步的,上述系统中,所述第四模块,用于定义严重度、暴露度、可控性和asil的
分级标准。
19.进一步的,上述系统中,所述第七模块,用于根据所述分级标准对仿真结果进行评级,确认仿真结果的严重度、暴露度、可控性和asil的等级。
20.根据本发明的另一面,还提供一种计算机可读介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现上述任一项所述的方法。
21.根据本发明的另一方面,还提供一种用于在网络设备端信息处理的设备,该设备包括用于存储计算机程序指令的存储器和用于执行程序指令的处理器,其中,当该计算机程序指令被该处理器执行时,触发该设备执行上述任一项所述的方法。
22.本发明可以基于仿真测试系统自动完成hara分析,能够遍历所有的功能场景及子功能故障,保证hara条目的完整性,只需定义完整子功能故障模式及功能场景即可。本发明通过前期的功能场景、故障模式、评级标准等,由仿真测试系统遍历所有功能场景和故障模式并根据仿真结果进行hara量化分析评级,最终可以得到完整和客观的hara表格。因此,该发明能解决在传统hara分析中功能安全目标缺失、评级主观性较强等缺陷,为自动驾驶系统的设计和改进提供参考。
附图说明
23.图1是本发明一实施例的用于自动驾驶系统的hara量化分析的方法的原理图;图2是本发明一实施例的自动驾驶系统与仿真测试系统的配合示意图;图3是本发明一实施例的仿真测试系统的原理图。
具体实施方式
24.下面结合附图对本发明作进一步详细描述。
25.在本技术一个典型的配置中,终端、服务网络的设备和可信方均包括一个或多个处理器 (cpu)、输入/输出接口、网络接口和内存。
26.内存可能包括计算机可读介质中的非永久性存储器,随机存取存储器 (ram) 和/或非易失性内存等形式,如只读存储器 (rom) 或闪存(flash ram)。内存是计算机可读介质的示例。
27.计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存 (pram)、静态随机存取存储器 (sram)、动态随机存取存储器 (dram)、其他类型的随机存取存储器 (ram)、只读存储器 (rom)、电可擦除可编程只读存储器 (eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器 (cd-rom)、数字多功能光盘 (dvd) 或其他光学存储、 磁盒式磁带,磁带磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括非暂存电脑可读媒体 (transitory media),如调制的数据信号和载波。
28.如图1所示,本发明涉及一种用于自动驾驶系统的hara量化分析的方法,所述方法包括:步骤s1~步骤s7。
29.步骤s1,根据自动驾驶系统的功能定义相应的功能场景;
。
34.步骤s6,在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以得到仿真结果;在此,仿真测试系统可以自动化开展仿真测试,在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以得到仿真结果;仿真测试系统在每个测试用例下分别向自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以遍历完成全部测试。
35.步骤s7,根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级。
36.在此,仿真测试系统可以依据预先定义的分级标准对仿真结果进行评级,自动化确认严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级。
37.本发明可以基于仿真测试系统自动完成hara分析,能够遍历所有的功能场景及子功能故障,保证hara条目的完整性,只需定义完整子功能故障模式及功能场景即可。本发明通过前期的功能场景、故障模式、评级标准等,由仿真测试系统遍历所有功能场景和故障模式并根据仿真结果进行hara量化分析评级,最终可以得到完整和客观的hara表格。因此,该发明能解决在传统hara分析中功能安全目标缺失、评级主观性较强等缺陷,为自动驾驶系统的设计和改进提供参考。
38.如图2所示,本发明提供自动驾驶系统在环的仿真测试系统,仿真测试系统可以根据预先定义的功能场景构建具体测试用例,由自动驾驶系统向仿真测试系统提供车辆控制参数,仿真测试系统向自动驾驶系统反馈仿真环境信息和车辆自身状态,实现对虚拟车辆的闭环控制,以模拟真实自动驾驶汽车在场景中的表现。
39.本发明的于自动驾驶系统的hara量化分析的方法一实施例中,步骤s7,根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级之后,还包括:步骤s8,生成hara表格;步骤s9,基于所述hara量化分析表格提取自动驾驶系统的安全目标。
40.在此,可以基于仿真测试系统输出hara表格提取整车安全目标,用于后续车辆的准确、可靠的安全分析。
41.本发明的于自动驾驶系统的hara量化分析的方法一实施例中,步骤s4,定义hara量化分析的分级标准,包括:定义严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的分级标准。
42.在此,可以基于已有数据,依据j2980和iso26262中参考意见,定义严重度(severity)、暴露度(exposure)和可控性(control lability)的分级标准,为后续仿真结果提供可靠的评价标准。
43.本发明的于自动驾驶系统的hara量化分析的方法一实施例中,步骤s7,根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级,包括:
根据所述分级标准对仿真结果进行评级,确认仿真结果的严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级。
44.在此,仿真测试系统可以根据分级标准对sec进行评级,结果示例如下所示:,通过本实施例,可以准确、可靠的确认仿真结果的严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级。
45.本发明的于自动驾驶系统的hara量化分析的方法一实施例中,步骤s8中,所述hara量化分析表格包括:测试用例、故障模式及其对应的仿真结果的严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级。
46.在此,仿真测试系统输出hara量化分析表格,可以包含上述测试用例、故障模式以及仿真结果的严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级,可以根据hara量化分析表格,高效、可靠的提取整车安全目标,整车安全目标例如可以是:车辆在车速高于60kph时应避免非预期扭矩;车辆在车速高于30kph时应避免丧失制动力。
47.本发明的仿真测试系统具体可如图3所示。
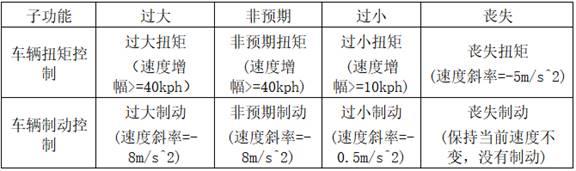
48.根据本发明的另一方面,还提供一种用于自动驾驶系统的hara量化分析的系统,其中,该系统包括:第一模块,用于根据自动驾驶系统的功能定义相应的功能场景;在此,可以自动驾驶系统的功能定义相应的功能场景,用于后续仿真系统的测试,功能场景应包含大多数典型驾驶场景;本发明以acc(adaptive cruise control,汽车自适应巡航控制)功能为例对实施例进行说明:acc功能的功能场景可以包含:道路类型、道路结构和道路条件,其中,道路类型可以包括:高速道路、城市道路、国道、隧道、高速匝道、桥梁道路等;道路结构可以包含:直路和弯路;道路条件可以考虑:干燥路面、由于积雪导致的湿滑路面等;第二模块,用于基于所述功能场景得到对应的子功能及子功能所影响的车辆参数;在此,工程师可以根据步骤s1定义好的功能场景,定义完整的子功能,及各个子功能所影响的具体车辆参数;acc功能的子功能及其所影响的车辆参数如下表所示:;第三模块,用于分析得到所述子功能的故障模式,确定各个故障模式对应的车辆
参数的变化幅度;在此,仿真测试系统可以自动化进行hazop分析,步骤s2得到子功能后,可以在步骤s3得到完整的子功能的故障模式的基础上,筛选必要的故障模式,并明确各个必要的故障模式对应的车辆参数的变化幅度;筛选后的部分hazop表格如下所示:;第四模块,用于定义hara量化分析的分级标准;在此,可以基于已有数据,依据j2980和iso26262中参考意见,定义hara量化分析的分级标准,为后续仿真结果提供评价标准;第五模块,用于根据所述功能场景构建测试用例;在此,自动驾驶系统在环的仿真测试系统,可以根据预先定义的功能场景构建测试用例;仿真测试系统根据功能场景构建的部分测试用例可示例如下:;第六模块,用于在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以得到仿真结果;在此,仿真测试系统可以自动化开展仿真测试,在每个测试用例下分别为自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以得到仿真结果;仿真测试系统在每个测试用例下分别向自动驾驶系统注入各个故障模式对应的车辆参数的变化幅度,以遍历完成全部测试;第七模块,用于根据所述分级标准对仿真结果进行评级,确认hara量化分析的等级。
49.在此,仿真测试系统可以依据预先定义的分级标准对仿真结果进行评级,自动化确认严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级。
50.本发明可以基于仿真测试系统自动完成hara分析,能够遍历所有的功能场景及子功能故障,保证hara条目的完整性,只需定义完整子功能故障模式及功能场景即可。本发明通过前期的功能场景、故障模式、评级标准等,由仿真测试系统遍历所有功能场景和故障模式并根据仿真结果进行hara量化分析评级,最终可以得到完整和客观的hara表格。因此,该发明能解决在传统hara分析中功能安全目标缺失、评级主观性较强等缺陷,为自动驾驶系统的设计和改进提供参考。
51.进一步的,上述系统中,所示功能场景包括:道路类型、道路结构和道路条件,其中,所示道路类型包括:高速道路、城市道路、国道、隧道、高速匝道和桥梁道路;道路结构包括:直路和弯路;道路条件包括:干燥路面和由于积雪导致的湿滑路面。
52.进一步的,上述系统中,还包括:第八模块,用于生成hara表格;基于所述hara量化分析表格提取自动驾驶系统的安全目标。
53.在此,可以基于仿真测试系统输出hara表格提取整车安全目标,用于后续车辆的准确、可靠的安全分析。
54.进一步的,上述系统中,所述hara量化分析表格包括:测试用例、故障模式及其对应的仿真结果的严重度、暴露度、可控性和asil的等级。
55.在此,仿真测试系统输出hara量化分析表格,可以包含上述测试用例、故障模式以及仿真结果的严重度(severity)、暴露度(exposure)、可控性(control lability)和asil的等级,可以根据hara量化分析表格,高效、可靠的提取整车安全目标,整车安全目标例如可以是:车辆在车速高于60kph时应避免非预期扭矩;车辆在车速高于30kph时应避免丧失制动力。
56.本发明的仿真测试系统具体可如图3所示。
57.进一步的,上述系统中,所述第四模块,用于定义严重度、暴露度、可控性和asil的分级标准。
58.在此,可以基于已有数据,依据j2980和iso26262中参考意见,定义严重度(severity)、暴露度(exposure)和可控性(control lability)的分级标准,为后续仿真结果提供可靠的评价标准。
59.进一步的,上述系统中,所述第七模块,用于根据所述分级标准对仿真结果进行评级,确认仿真结果的严重度、暴露度、可控性和asil的等级。
60.在此,仿真测试系统可以根据分级标准对sec进行评级,结果示例如下所示:。
61.根据本发明的另一面,还提供一种计算机可读介质,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现上述任一项所述的方法。
62.根据本发明的另一方面,还提供一种用于在网络设备端信息处理的设备,该设备包括用于存储计算机程序指令的存储器和用于执行程序指令的处理器,其中,当该计算机程序指令被该处理器执行时,触发该设备执行上述任一项所述的方法。
63.本发明各设备实施例的详细内容具体可参见各方法实施例的对应部分,在此,不再赘述。
64.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
65.需要注意的是,本发明可在软件和/或软件与硬件的组合体中被实施,例如,可采用专用集成电路(asic)、通用目的计算机或任何其他类似硬件设备来实现。在一个实施例中,本发明的软件程序可以通过处理器执行以实现上文所述步骤或功能。同样地,本发明的软件程序(包括相关的数据结构)可以被存储到计算机可读记录介质中,例如,ram存储器,磁或光驱动器或软磁盘及类似设备。另外,本发明的一些步骤或功能可采用硬件来实现,例如,作为与处理器配合从而执行各个步骤或功能的电路。
66.另外,本发明的一部分可被应用为计算机程序产品,例如计算机程序指令,当其被计算机执行时,通过该计算机的操作,可以调用或提供根据本发明的方法和/或技术方案。而调用本发明的方法的程序指令,可能被存储在固定的或可移动的记录介质中,和/或通过广播或其他信号承载媒体中的数据流而被传输,和/或被存储在根据所述程序指令运行的计算机设备的工作存储器中。在此,根据本发明的一个实施例包括一个装置,该装置包括用于存储计算机程序指令的存储器和用于执行程序指令的处理器,其中,当该计算机程序指令被该处理器执行时,触发该装置运行基于前述根据本发明的多个实施例的方法和/或技术方案。
67.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化涵括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。此外,显然“包括”一词不排除其他单元或步骤,单数不排除复数。装置权利要求中陈述的多个单元或装置也可以由一个单元或装置通过软件或者硬件来实现。第一,第二等词语用来表示名称,而并不表示任何特定的顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1