虹膜内边界定位方法、装置、存储介质及设备与流程
本发明涉及虹膜识别领域,特别是指一种虹膜内边界定位方法、装置、存储介质及设备。
背景技术:
1、现代社会的发展对人类自身身份识别的准确性、安全性与实用性提出了更高的要求。而身份识别是人们日常生活中遇到的一个普遍性问题,在生活中经常会发生需要证明自己的身份、鉴别别人的身份等情况。传统的依赖照片的身份识别方法己经远远落后于时代的要求,必须寻求更为安全可靠、使用方便的身份识别新途径。基于生物特征识别的身份鉴定技术具有以下优点:不易遗忘或丢失,防伪性能好,不易伪造或被盗,随身携带,随时随地可用等。
2、生物特征识别技术是指使用人体本身所固有的生理特征或行为特征进行身份认证,具有不可复制性、唯一性、普遍性和稳定性等特点。而虹膜具有随机的细节特征和纹理特征,且保持相当高的稳定性;具有内在的隔离和保护能力,不需要接触式采集等生理方面的优点,虹膜识别有着广泛的市场前景和科学研究价值。
3、虹膜是位于瞳孔和巩膜之间的,类似环形的结构,如图1中虹膜外圆和虹膜内圆的部分,图1中由于眼睑以及眼睫毛的遮挡,丢失了一部分虹膜信息。虹膜直径约为12mm,厚度约为0.5mm。从识别的角度来看,虹膜中那些相互交错的类似于细丝、条纹等形状的细微特征是虹膜唯一性的体现。这些特征通常为虹膜的纹理特征,用于虹膜识别。
4、虹膜定位是指确定虹膜的内、外边界,虹膜内边界是瞳孔和虹膜的边界,是一个类似于圆的边界。但是由于瞳孔的放缩、倾斜和其他一些疾病等原因,导致虹膜内边界并不是一个真正的圆形边界。在实际的应用中,现有技术是将虹膜内边界按照圆来定位的,这种按照圆形定位的方法导致虹膜内边界的定位不准确,尤其是对于图2所示的稍微斜视的虹膜图像或虹膜纹理比较浅的虹膜图像。虹膜识别属于一种精准的识别方式,尤其是虹膜内圈纹理比较丰富,含有信息量比较大,虹膜内边界定位一个像素的偏差会导致识别结果偏差比较大,导致虹膜识别不准确。
技术实现思路
1、为解决现有技术的缺陷,本发明提供一种虹膜内边界定位方法、装置、存储介质及设备,对非规则圆形的虹膜内边界和规则圆形的虹膜内边界均能实现定位,保证了定位的准确性,提高了虹膜识别的准确率。
2、本发明提供技术方案如下:
3、第一方面,本发明提供一种虹膜内边界定位方法,所述方法包括:
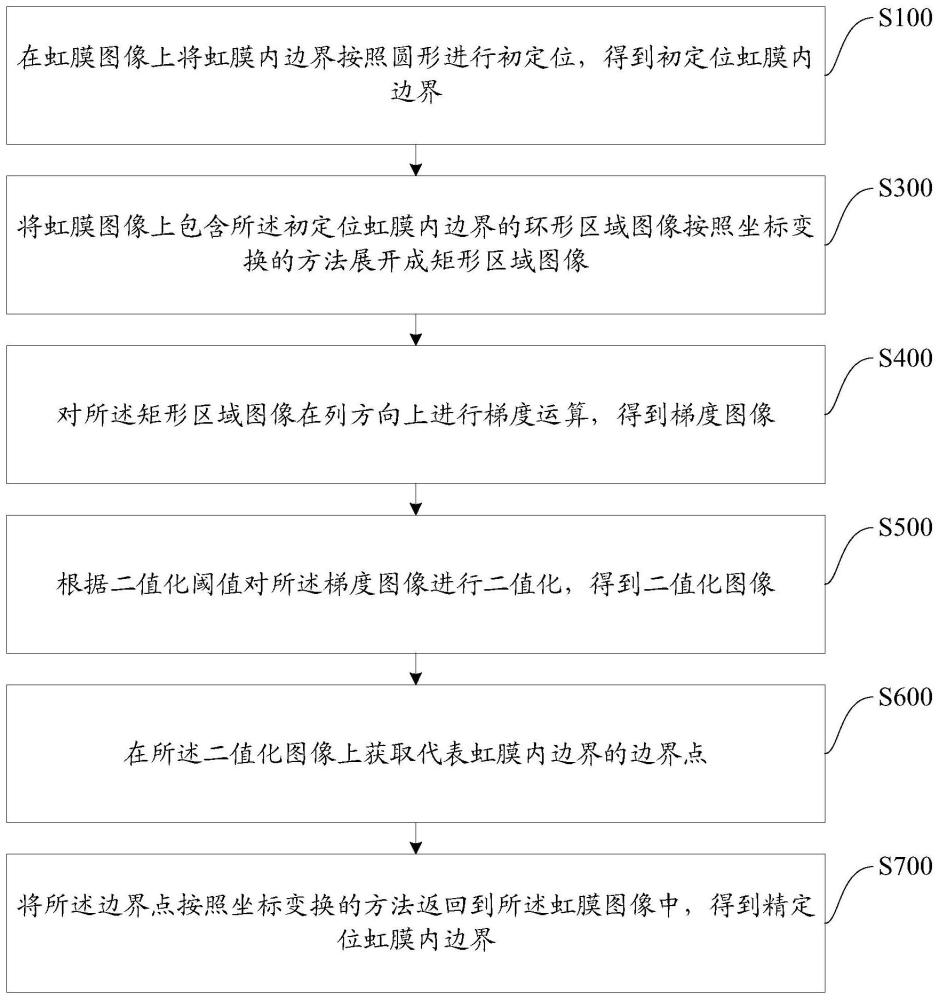
4、在虹膜图像上将虹膜内边界按照圆形进行初定位,得到初定位虹膜内边界;
5、将虹膜图像上包含所述初定位虹膜内边界的环形区域图像按照坐标变换的方法展开成矩形区域图像;
6、对所述矩形区域图像在列方向上进行梯度运算,得到梯度图像;
7、根据二值化阈值对所述梯度图像进行二值化,得到二值化图像;
8、在所述二值化图像上获取代表虹膜内边界的边界点;
9、将所述边界点按照坐标变换的方法返回到所述虹膜图像中,得到精定位虹膜内边界。
10、进一步的,所述对所述矩形区域图像在列方向上进行梯度运算,得到梯度图像,包括:
11、按照设定的滤波核对所述矩形区域图像进行滤波操作;
12、将滤波操作后的图像间隔一定行数作行相减运算;
13、将行相减运算后大于0的值保留,小于等于0的值设置为0,得到所述梯度图像。
14、进一步的,所述在所述二值化图像上获取代表虹膜内边界的边界点,包括:
15、对所述二值化图像进行形态学运算;
16、对形态学运算后的图像的每一列,若该列的前景点数量大于设定数量,则将该列所有前景点的平均值作为该列的边界点,若该列的前景点数量小于等于设定数量,则对该列进行局部梯度运算,获取该列的边界点;
17、对形态学运算后的图像的每一列,若该列的前景点数量为0,则以该列前后最近若干列的边界点进行曲线拟合,得到该列的边界点。
18、进一步的,所述在虹膜图像上将虹膜内边界按照圆形进行初定位,得到初定位虹膜内边界之后,所述将虹膜图像上包含所述初定位虹膜内边界的环形区域图像按照坐标变换的方法展开成矩形区域图像之前,还包括:
19、获取所述虹膜图像的噪声区域,并将所述噪声区域从所述虹膜图像上去除。
20、进一步的,所述在虹膜图像上将虹膜内边界按照圆形进行初定位,得到初定位虹膜内边界,包括:
21、在所述虹膜图像上将虹膜内边界按照圆形进行初定位,得到表示所述初定位虹膜内边界的虹膜内圆圆心和虹膜内圆半径;
22、所述将虹膜图像上包含所述初定位虹膜内边界的环形区域图像按照坐标变换的方法展开成矩形区域图像,包括:
23、以所述虹膜内圆圆心为圆心,在所述虹膜图像上将半径范围为[r1,r2]的环形区域图像按照坐标变换的方法展开成矩形区域图像;其中,r1<ri<r2,ri为所述虹膜内圆半径。
24、或者,所述在虹膜图像上将虹膜内边界按照圆形进行初定位,得到初定位虹膜内边界,包括:
25、在所述虹膜图像上将虹膜内边界和虹膜外边界按照圆形进行初定位,得到表示所述初定位虹膜内边界的虹膜内圆圆心、虹膜内圆半径和表示初定位虹膜外边界的虹膜外圆圆心;
26、所述将虹膜图像上包含所述初定位虹膜内边界的环形区域图像按照坐标变换的方法展开成矩形区域图像,包括:
27、以所述虹膜内圆圆心和虹膜外圆圆心的平均值为圆心,在所述虹膜图像上将半径范围为[r1,r2]的环形区域图像按照坐标变换的方法展开成矩形区域图像;其中,r1<ri<r2,ri为所述虹膜内圆半径。
28、进一步的,r1=ri-t,r2=ri+t,t为设定的像素数;
29、或者,r1=a1ri,r2=a2ri,a1和a2为设定的系数,0<a1<1<a2。
30、进一步的,所述二值化阈值通过如下方法确定:
31、获取所述梯度图像上各个像素的最大值;
32、取所述最大值的设定百分比作为所述二值化阈值;
33、其中,0<所述设定百分比<100%。
34、第二方面,本发明提供一种虹膜内边界定位装置,所述装置包括:
35、初定位模块,用于在虹膜图像上将虹膜内边界按照圆形进行初定位,得到初定位虹膜内边界;
36、第一坐标变换模块,用于将虹膜图像上包含所述初定位虹膜内边界的环形区域图像按照坐标变换的方法展开成矩形区域图像;
37、梯度计算模块,用于对所述矩形区域图像在列方向上进行梯度运算,得到梯度图像;
38、二值化模块,用于根据二值化阈值对所述梯度图像进行二值化,得到二值化图像;
39、边界点获取模块,用于在所述二值化图像上获取代表虹膜内边界的边界点;
40、第二坐标变换模块,用于将所述边界点按照坐标变换的方法返回到所述虹膜图像中,得到精定位虹膜内边界。
41、进一步的,所述梯度计算模块包括:
42、滤波单元,用于按照设定的滤波核对所述矩形区域图像进行滤波操作;
43、行相减单元,用于将滤波操作后的图像间隔一定行数作行相减运算;
44、筛选单元,用于将行相减运算后大于0的值保留,小于等于0的值设置为0,得到所述梯度图像。
45、进一步的,所述边界点获取模块包括:
46、形态学运算单元,用于对所述二值化图像进行形态学运算;
47、边界点计算单元,用于对形态学运算后的图像的每一列,若该列的前景点数量大于设定数量,则将该列所有前景点的平均值作为该列的边界点,若该列的前景点数量小于等于设定数量,则对该列进行局部梯度运算,获取该列的边界点;
48、边界补齐单元,用于对形态学运算后的图像的每一列,若该列的前景点数量为0,则以该列前后最近若干列的边界点进行曲线拟合,得到该列的边界点。
49、进一步的,所述装置还包括:
50、噪声获取模块,用于获取所述虹膜图像的噪声区域,并将所述噪声区域从所述虹膜图像上去除。
51、进一步的,所述初定位模块包括:
52、第一定位单元,用于在所述虹膜图像上将虹膜内边界按照圆形进行初定位,得到表示所述初定位虹膜内边界的虹膜内圆圆心和虹膜内圆半径;
53、所述第一坐标变换模块包括:
54、第一变换单元,用于以所述虹膜内圆圆心为圆心,在所述虹膜图像上将半径范围为[r1,r2]的环形区域图像按照坐标变换的方法展开成矩形区域图像;其中,r1<ri<r2,ri为所述虹膜内圆半径。
55、或者;
56、所述初定位模块包括:
57、第二定位单元,用于在所述虹膜图像上将虹膜内边界和虹膜外边界按照圆形进行初定位,得到表示所述初定位虹膜内边界的虹膜内圆圆心、虹膜内圆半径和表示初定位虹膜外边界的虹膜外圆圆心;
58、所述第一坐标变换模块包括:
59、第二变换单元,用于以所述虹膜内圆圆心和虹膜外圆圆心的平均值为圆心,在所述虹膜图像上将半径范围为[r1,r2]的环形区域图像按照坐标变换的方法展开成矩形区域图像;其中,r1<ri<r2,ri为所述虹膜内圆半径。
60、进一步的,r1=ri-t,r2=ri+t,t为设定的像素数;
61、或者,r1=a1ri,r2=a2ri,a1和a2为设定的系数,0<a1<1<a2。
62、进一步的,所述二值化阈值通过如下过程确定:
63、获取所述梯度图像上各个像素的最大值;
64、取所述最大值的设定百分比作为所述二值化阈值;
65、其中,0<所述设定百分比<100%。
66、第三方面,本发明提供一种用于虹膜内边界定位的计算机可读存储介质,包括用于存储处理器可执行指令的存储器,所述指令被所述处理器执行时实现包括第一方面所述的虹膜内边界定位方法的步骤。
67、第四方面,本发明提供一种用于虹膜内边界定位的设备,包括至少一个处理器以及存储计算机可执行指令的存储器,所述处理器执行所述指令时实现第一方面所述的虹膜内边界定位方法的步骤。
68、本发明具有以下有益效果:
69、本发明首先对虹膜内边界按照圆形进行初定位,然后将包含初定位虹膜内边界的环形区域图像展开成矩形区域图像,接着在矩形区域图像的列方向上进行梯度运算并进行二值化处理,在得到的二值化图像上确定虹膜内边界的边界点;最后将边界点返回到虹膜图像中,得到精定位虹膜内边界。本发明是一种通用的虹膜内边界的定位方式,对非规则圆形的虹膜内边界和规则圆形的虹膜内边界均能实现定位,并且保证了定位的准确性,提高了虹膜识别的准确率。
- 还没有人留言评论。精彩留言会获得点赞!