车辆控制方法、车辆及设备与流程
本技术实施例涉及车辆工程,特别涉及一种车辆控制方法、车辆及设备。
背景技术:
1、随着车辆工程技术的逐渐成熟,车辆工程技术在满足日常出行的基础上,开始向自动驾驶技术方向发展。自动驾驶技术的发展是通过不断测试实现的,在测试目标车辆上的自动驾驶系统的性能时,常会出现自动驾驶系统的性能不符合预期的情况,针对该情况需要一种对目标车辆的车辆控制方法。
技术实现思路
1、本技术实施例提供了一种车辆控制方法、车辆及设备,可用于在自动驾驶系统的性能不符合预期的情况,对目标车辆进行控制。所述技术方案如下:
2、一方面,本技术实施例提供了一种车辆控制方法,应用于应急系统,所述方法包括:
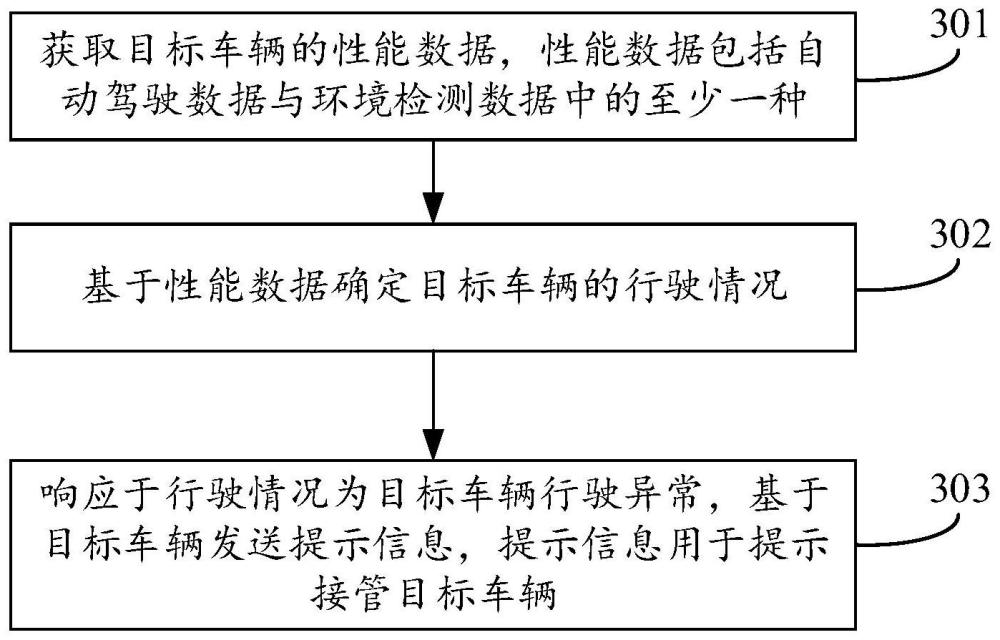
3、获取目标车辆的性能数据,所述性能数据包括自动驾驶数据与环境检测数据中的至少一种;
4、基于所述性能数据确定所述目标车辆的行驶情况;
5、响应于所述行驶情况为所述目标车辆行驶异常,基于所述目标车辆发送提示信息,所述提示信息用于提示接管所述目标车辆。
6、在一种可能的实现方式中,所述基于所述性能数据确定所述目标车辆的行驶情况,包括:
7、响应于所述性能数据包括所述环境检测数据,确定所述环境检测数据的获取时间与参考环境数据的获取时间之间的时间间隔,所述参考环境数据为前一次获取的环境检测数据,所述环境检测数据用于控制所述目标车辆的行驶;
8、基于所述时间间隔与第一阈值,确定所述环境检测数据的输出情况,基于所述环境检测数据的输出情况确定所述目标车辆的行驶情况。
9、在一种可能的实现方式中,所述基于所述时间间隔与第一阈值,确定所述环境检测数据的输出情况,基于所述环境检测数据的输出情况确定所述目标车辆的行驶情况,包括:
10、响应于所述时间间隔大于所述第一阈值,确定所述输出情况为所述环境检测数据输出异常,基于所述环境检测数据输出异常确定所述目标车辆的行驶情况为所述目标车辆行驶异常;
11、响应于所述时间间隔不大于所述第一阈值,确定所述输出情况为所述环境检测数据输出正常,基于所述环境检测数据输出正常确定所述目标车辆的行驶情况为所述目标车辆行驶正常。
12、在一种可能的实现方式中,所述基于所述性能数据确定所述目标车辆的行驶情况,包括:
13、响应于所述性能数据包括所述自动驾驶数据中的路径规划信息,确定所述路径规划信息与参考路径信息之间的距离差值,所述参考路径信息为前一次获取的路径规划信息,所述路径规划信息与所述参考路径信息基于所述目标车辆中的自动驾驶系统中的路径规划模块输出;
14、基于所述距离差值与第二阈值,确定所述路径规划模块的运行情况,基于所述路径规划模块的运行情况确定所述目标车辆的行驶情况。
15、在一种可能的实现方式中,所述基于所述距离差值与第二阈值,确定所述路径规划模块的运行情况,基于所述路径规划模块的运行情况确定所述目标车辆的行驶情况,包括:
16、响应于所述距离差值大于所述第二阈值,确定所述运行情况为所述路径规划模块运行异常,基于所述路径规划模块运行异常确定所述目标车辆的行驶情况为所述目标车辆行驶异常;
17、响应于所述距离差值不大于所述第二阈值,确定所述运行情况为所述路径规划模块运行正常,基于所述路径规划模块运行正常确定所述目标车辆的行驶情况为所述目标车辆行驶正常。
18、在一种可能的实现方式中,所述基于所述目标车辆发送提示信息之前,所述方法还包括:
19、基于所述目标车辆的性能数据确定所述目标车辆的异常原因对应的提示信息,所述异常原因对应的提示信息用于提示所述目标车辆的接管对象基于所述异常原因接管所述目标车辆。
20、在一种可能的实现方式中,所述基于所述目标车辆发送提示信息之后,所述方法还包括:
21、响应于在参考时间范围内所述目标车辆的接管对象未接管所述目标车辆,控制所述目标车辆重复发送所述提示信息。
22、在一种可能的实现方式中,所述环境检测数据包括所述目标车辆的周围路况信息、障碍物的类型与障碍物的大小中的至少一种,所述自动驾驶数据包括所述目标车辆的预测模块输出的障碍物的预测轨迹信息、路径规划模块输出的所述目标车辆的自车决策信息、所述路径规划模块输出的所述目标车辆的路径规划信息、控制模块输出的所述目标车辆的方向盘转角、所述控制模块输出的所述目标车辆的油门踏板开度与刹车踏板开度中的至少一种。
23、在一种可能的实现方式中,所述基于所述目标车辆发送提示信息,包括:
24、基于所述目标车辆上的信息链路,向所述目标车辆的车载终端发送所述提示信息,基于所述车载终端控制所述目标车辆发送提示信息,所述车载终端用于控制所述目标车辆的灯光和音频中的至少一种,所述提示信息用于提示所述目标车辆的接管对象接管所述目标车辆。
25、在一种可能的实现方式中,所述基于所述目标车辆发送提示信息,包括:
26、确定所述目标车辆对应的远端终端;
27、向所述远端终端发送提示信息,所述提示信息通过提示窗口进行显示,所述提示信息用于基于所述远端终端提示所述接管对象接管所述目标车辆。
28、另一方面,提供了一种车辆控制装置,所述装置包括:
29、获取模块,用于获取目标车辆的性能数据,所述性能数据包括自动驾驶数据与环境检测数据中的至少一种;
30、确定模块,用于基于所述性能数据确定所述目标车辆的行驶情况;
31、提示模块,用于响应于所述行驶情况为所述目标车辆行驶异常,基于所述目标车辆发送提示信息,所述提示信息用于提示接管所述目标车辆。
32、在一种可能的实现方式中,所述确定模块,用于响应于所述性能数据包括所述环境检测数据,确定所述环境检测数据的获取时间与参考环境数据的获取时间之间的时间间隔,所述参考环境数据为前一次获取的环境检测数据,所述环境检测数据用于控制所述目标车辆的行驶;基于所述时间间隔与第一阈值,确定所述环境检测数据的输出情况,基于所述环境检测数据的输出情况确定所述目标车辆的行驶情况。
33、在一种可能的实现方式中,所述确定模块,用于响应于所述时间间隔大于所述第一阈值,确定所述输出情况为所述环境检测数据输出异常,基于所述环境检测数据输出异常确定所述目标车辆的行驶情况为所述目标车辆行驶异常;响应于所述时间间隔不大于所述第一阈值,确定所述输出情况为所述环境检测数据输出正常,基于所述环境检测数据输出正常确定所述目标车辆的行驶情况为所述目标车辆行驶正常。
34、在一种可能的实现方式中,所述确定模块,用于响应于所述性能数据包括所述自动驾驶数据中的路径规划信息,确定所述路径规划信息与参考路径信息之间的距离差值,所述参考路径信息为前一次获取的路径规划信息,所述路径规划信息与所述参考路径信息基于所述目标车辆中的自动驾驶系统中的路径规划模块输出;基于所述距离差值与第二阈值,确定所述路径规划模块的运行情况,基于所述路径规划模块的运行情况确定所述目标车辆的行驶情况。
35、在一种可能的实现方式中,所述确定模块,用于响应于所述距离差值大于所述第二阈值,确定所述运行情况为所述路径规划模块运行异常,基于所述路径规划模块运行异常确定所述目标车辆的行驶情况为所述目标车辆行驶异常;响应于所述距离差值不大于所述第二阈值,确定所述运行情况为所述路径规划模块运行正常,基于所述路径规划模块运行正常确定所述目标车辆的行驶情况为所述目标车辆行驶正常。
36、在一种可能的实现方式中,所述确定模块,还用于基于所述目标车辆的性能数据确定所述目标车辆的异常原因对应的提示信息,所述异常原因对应的提示信息用于提示所述目标车辆的接管对象基于所述异常原因接管所述目标车辆。
37、在一种可能的实现方式中,所述提示模块,还用于响应于在参考时间范围内所述目标车辆的接管对象未接管所述目标车辆,控制所述目标车辆重复发送所述提示信息。
38、在一种可能的实现方式中,所述环境检测数据包括所述目标车辆的周围路况信息、障碍物的类型与障碍物的大小中的至少一种,所述自动驾驶数据包括所述目标车辆的预测模块输出的障碍物的预测轨迹信息、路径规划模块输出的所述目标车辆的自车决策信息、所述路径规划模块输出的所述目标车辆的路径规划信息、控制模块输出的所述目标车辆的方向盘转角、所述控制模块输出的所述目标车辆的油门踏板开度与刹车踏板开度中的至少一种。
39、在一种可能的实现方式中,所述提示模块,用于基于所述目标车辆上的信息链路,向所述目标车辆的车载终端发送所述提示信息,基于所述车载终端控制所述目标车辆发送提示信息,所述车载终端用于控制所述目标车辆的灯光和音频中的至少一种,所述提示信息用于提示所述目标车辆的接管对象接管所述目标车辆。
40、在一种可能的实现方式中,所述提示模块,用于确定所述目标车辆对应的远端终端;向所述远端终端发送提示信息,所述提示信息通过提示窗口进行显示,所述提示信息用于基于所述远端终端提示所述接管对象接管所述目标车辆。
41、另一方面,提供了一种车辆,所述车辆包括应急系统,所述应急系统用于执行上述任一所述的车辆控制方法。
42、另一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述计算机设备实现上述任一所述的车辆控制方法。
43、另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现上述任一所述的车辆控制方法。
44、另一方面,还提供了一种计算机程序产品或计算机程序,所述计算机程序产品或计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中。计算机设备的处理器从所述计算机可读存储介质读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行上述任一所述的车辆控制方法。
45、本技术实施例提供的技术方案至少带来如下有益效果:
46、通过目标车辆的性能数据确定目标车辆的行驶情况,并在目标车辆行驶异常时,通过提示信息及时提示接管目标车辆,以辅助规范目标车辆的接管时机,提高了目标车辆接管的及时性与准确性,交互体验感强。
- 还没有人留言评论。精彩留言会获得点赞!