一种手臂运动跟踪装置及其运动捕捉方法与流程
1.本发明涉及运动跟踪技术领域,尤其涉及一种手臂运动跟踪装置及其运动捕捉方法。
背景技术:
2.运动跟踪一般指运动捕捉,运动捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备,它基于计算机图形学原理,通过排布在空间中的数个视频捕捉设备将运动物体(跟踪器)的运动状况以图像的形式记录下来,然后使用计算机对该图象数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标,从技术的角度来说,运动捕捉的实质就是要测量、跟踪、记录物体在三维空间中的运动轨迹。
3.典型的运动捕捉设备一般由传感器、信号捕捉、数据传输和数据处理几个部分组成,传感器是固定在运动物体特定部位的跟踪装置,它将向系统提供运动物体运动的位置信息,会随着捕捉的细致程度确定跟踪器的数目;信号捕捉负责捕捉、识别传感器的信号,负责将运动数据从信号捕捉设备快速准确地传送到计算机系统,这种设备会因系统的类型不同而有所区别,它们负责位置信号的捕捉,对于机械系统来说是一块捕捉电信号的线路板,对于光学系统则是高分辨率红外摄像机;数据传输是指特别是需要实时效果的系统需要将大量的运动数据从信号捕捉设备快速准确地传输到计算机系统进行处理,而数据传输设备就是用来完成此项工作的;数据处理是指经过系统捕捉到的数据需要修正,处理后还要有三维模型相结合才能完成计算机动画制作的工作,这就需要我们应用数据处理软件或硬件来完成此项工作,软件也好硬件也罢它们都是借助计算机对数据高速的运算能力来完成数据的处理,使三维模型真正,自然地运动起来,所以它是负责处理系统捕捉到的原始信号,计算传感器的运动轨迹,对数据进行修正,处理,并与三维角色模型相结合。
4.目前的手臂运动跟踪装置当需要将跟踪设备佩戴在手臂上时,不能够根据手臂的粗细对定位机构进行适当的调节,导致跟踪设备不便于佩戴在不同人员的手臂上,适用性不足。
技术实现要素:
5.基于手臂运动跟踪装置不便于佩戴在不同人员的手臂上、适用性不足的技术问题,本发明提出了一种手臂运动跟踪装置及其运动捕捉方法。
6.本发明提出的一种手臂运动跟踪装置,包括基座和绑紧带,所述基座顶部外壁一侧外壁开设有矩形活动孔,所述矩形活动孔相对一侧内壁固定连接有对称设置的固定块,两个所述固定块相对一侧外壁转动连接有同一个转动杆,所述绑紧带卷绕连接在转动杆外壁上,且绑紧带延伸至基座上方;
7.所述基座远离矩形活动孔的一侧设置有l形活动孔,所述绑紧带顶部外壁开设有对称设置的第一定位孔,所述基座一侧外壁开设有等距分布的第二定位孔,所述第一定位孔和第二定位孔孔径相同。
8.作为本发明的一种优选实施方式,所述基座一侧外壁开设有对称设置的通孔,且两个通孔内侧均设置有定位杆。
9.作为本发明的一种优选实施方式,两个所述定位杆一端均设置有螺纹段,两个所述螺纹段分别与两个第一定位孔和第二定位孔相适配。
10.作为本发明的一种优选实施方式,两个所述定位杆位于基座外侧的一端均固定连接有旋钮。
11.作为本发明的一种优选实施方式,所述基座顶部外壁开设有弧形槽,且弧形槽内壁固定连接有弧形结构的海绵垫。
12.一种手臂运动跟踪装置的运动捕捉方法,包括以下步骤:
13.s1:首先将运动传感器安装在基座上,运动传感器是固定在运动物体特定部位的跟踪装置,它将向系统提供运动物体运动的位置信息,会随着捕捉的细致程度确定跟踪器的数目;
14.s2:当运动传感器安装完成之后,将基座配合绑紧带的作用佩戴在手臂上,手臂表面放置于基座上的弧形槽内,并且和海绵垫相接触,使得手臂在佩戴时具有舒适性;
15.s3:当手臂放置在海绵垫上之后,将绑紧带经过固定块和转动杆的作用向矩形活动孔外侧拉动,并且绑紧带和手臂表面远离海绵垫的一侧相接触;
16.s4:当绑紧带和手臂表面接触之后,将绑紧带的一端延伸至l形活动孔内侧,并且穿过l形活动孔,使得绑紧带的顶端位于第二定位孔一侧,同时第一定位孔位于第二定位孔的一侧,并且可以根据手臂的粗细将第一定位孔移动至适当的第二定位孔一侧,具有较好的适用性;
17.s5:当第一定位孔位于第二定位孔一侧时,将定位杆从基座内取出,经过旋钮的作用将螺纹段螺接在第一定位孔内,并且螺纹段延伸螺接在第二定位孔内,达到对绑紧带的定位效果,使得基座佩戴在手臂上时具有较好的稳定性;
18.s6:当基座佩戴完成之后,根据运动传感器的作用进行手臂运动的信号捕捉,将手臂运动的运动数据从信号捕捉设备快速准确地传送到计算机系统,当运动数据从信号捕捉设备传送到计算机系统之后,利用数据传输系统对计算机系统进行处理;
19.s7:当数据传输完成之后,经过数据处理对系统捕捉到的数据进行修正,修正完成之后,利用三维模型系统相结合完成计算机动画制作的工作,使三维模型真正、自然地运动起来。
20.本发明中的有益效果为:
21.1、本发明中,首先将运动传感器安装在基座上,当运动传感器安装完成之后,将基座配合绑紧带的作用佩戴在手臂上,手臂表面放置于基座上的弧形槽内,并且和海绵垫相接触,使得手臂在佩戴时具有舒适性,当手臂放置在海绵垫上之后,将绑紧带经过固定块和转动杆的作用向矩形活动孔外侧拉动,并且绑紧带和手臂表面远离海绵垫的一侧相接触。
22.2、本发明中,当绑紧带和手臂表面接触之后,将绑紧带的一端延伸至l形活动孔内侧,并且穿过l形活动孔,使得绑紧带的顶端位于第二定位孔一侧,同时第一定位孔位于第二定位孔的一侧,并且可以根据手臂的粗细将第一定位孔移动至适当的第二定位孔一侧,具有较好的适用性,当第一定位孔位于第二定位孔一侧时,将定位杆从基座内取出,经过旋钮的作用将螺纹段螺接在第一定位孔内,并且螺纹段延伸螺接在第二定位孔内,达到对绑
紧带的定位效果,使得基座佩戴在手臂上时具有较好的稳定性。
附图说明
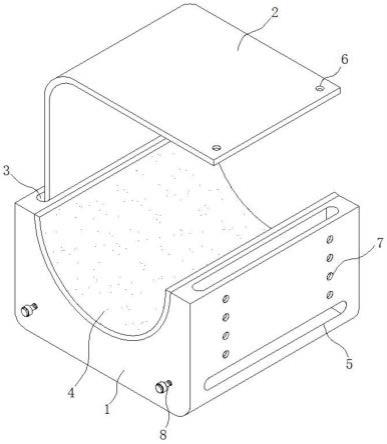
23.图1为本发明提出的一种手臂运动跟踪装置的立体结构示意图;
24.图2为本发明提出的一种手臂运动跟踪装置的局部俯视结构示意图;
25.图3为本发明提出的一种手臂运动跟踪装置的局部侧视剖视结构示意图;
26.图4为本发明提出的一种手臂运动跟踪装置的定位杆结构示意图;
27.图5为本发明提出的一种手臂运动跟踪装置的运动捕捉方法的流程示意图。
28.图中:1、基座;2、绑紧带;3、矩形活动孔;4、海绵垫;5、l形活动孔;6、第一定位孔;7、第二定位孔;8、定位杆;9、固定块;10、转动杆;11、螺纹段;12、旋钮。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.参照图1-5,一种手臂运动跟踪装置,包括基座1和绑紧带2,基座1顶部外壁一侧外壁开设有矩形活动孔3,矩形活动孔3相对一侧内壁固定连接有对称设置的固定块9,两个固定块9相对一侧外壁转动连接有同一个转动杆10,绑紧带2卷绕连接在转动杆10外壁上,且绑紧带2延伸至基座1上方;
31.基座1远离矩形活动孔3的一侧设置有l形活动孔5,绑紧带2顶部外壁开设有对称设置的第一定位孔6,基座1一侧外壁开设有等距分布的第二定位孔7,第一定位孔6和第二定位孔7孔径相同。
32.在具体实施方式中,基座1一侧外壁开设有对称设置的通孔,且两个通孔内侧均设置有定位杆8,两个定位杆8一端均设置有螺纹段11,两个螺纹段11分别与两个第一定位孔6和第二定位孔7相适配,两个定位杆8位于基座1外侧的一端均固定连接有旋钮12,基座1顶部外壁开设有弧形槽,且弧形槽内壁固定连接有弧形结构的海绵垫4。
33.一种手臂运动跟踪装置的运动捕捉方法,包括以下步骤:
34.s1:首先将运动传感器安装在基座1上,运动传感器是固定在运动物体特定部位的跟踪装置,它将向系统提供运动物体运动的位置信息,会随着捕捉的细致程度确定跟踪器的数目;
35.s2:当运动传感器安装完成之后,将基座1配合绑紧带2的作用佩戴在手臂上,手臂表面放置于基座上的弧形槽内,并且和海绵垫4相接触,使得手臂在佩戴时具有舒适性;
36.s3:当手臂放置在海绵垫4上之后,将绑紧带2经过固定块9和转动杆10的作用向矩形活动孔3外侧拉动,并且绑紧带2和手臂表面远离海绵垫4的一侧相接触;
37.s4:当绑紧带2和手臂表面接触之后,将绑紧带2的一端延伸至l形活动孔5内侧,并且穿过l形活动孔5,使得绑紧带2的顶端位于第二定位孔7一侧,同时第一定位孔6位于第二定位孔7的一侧,并且可以根据手臂的粗细将第一定位孔6移动至适当的第二定位孔7一侧,具有较好的适用性;
38.s5:当第一定位孔6位于第二定位孔7一侧时,将定位杆8从基座1内取出,经过旋钮12的作用将螺纹段11螺接在第一定位孔6内,并且螺纹段11延伸螺接在第二定位孔7内,达
到对绑紧带2的定位效果,使得基座1佩戴在手臂上时具有较好的稳定性;
39.s6:当基座1佩戴完成之后,根据运动传感器的作用进行手臂运动的信号捕捉,将手臂运动的运动数据从信号捕捉设备快速准确地传送到计算机系统,当运动数据从信号捕捉设备传送到计算机系统之后,利用数据传输系统对计算机系统进行处理;
40.s7:当数据传输完成之后,经过数据处理对系统捕捉到的数据进行修正,修正完成之后,利用三维模型系统相结合完成计算机动画制作的工作,使三维模型真正、自然地运动起来。
41.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
42.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
43.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1