视频AI识别车辆的拥堵状态的系统的制作方法
视频ai识别车辆的拥堵状态的系统
技术领域
1.本发明涉及人工智能车辆检测领域,具体涉及一种视频ai识别车辆拥堵的系统。
背景技术:
2.在社区、园区、商业体、景区等业态下,由于车流过大、故障或道路障碍物等引起车辆拥堵是常见的现象,导致用户出行体验差、引起交通和安全问题,甚至造成经济损失。
3.在传统的管控车辆拥堵的方案中,通常是通过人工通报、传统视频监控巡查道路情况等方式来处理,都面临着更高的项目用人成本,以及处理效率等问题。
4.因此开发准确率高的一种视频ai识别车辆拥堵的系统就显得很有必要。
技术实现要素:
5.为克服现有技术的不足,本发明的目的在于提供一种视频ai识别车辆拥堵的系统、电子装置和存储介质,通过灵活设置检测拥堵车辆数,触发拥堵触发时长,检测结果以告警事件形式输出自动通知相关管理人员,并支持联动控制对应的疏导装置,实现车辆自动导流的目的。
6.本发明通过以下的技术方案来实现:一种视频ai识别车辆的拥堵状态系统,包括,视频图像转换模块,将视频图像转换成图像信息;车辆位置计算模块,计算车辆在所述图像信息中的图像位置及置信度;拥堵状态识别模块,具有窗口计算单元、车辆颜色计算单元、数据缓存单元和拥堵状态计算单元,所述窗口计算单元将时间段按照图像输入频率划分成多段,所述车辆颜色计算单元识别处于重叠区域位置的叠放车辆颜色是否一致,所述数据缓存单元存储缓存车辆列表中的车辆位置信息,所述车辆拥堵计算单元根据当前所述车辆位置计算模块计算的车辆在所述图像信息中的图像位置及置信度比对所述缓存单元中的缓存车辆列表数据信息,计算获得车辆的拥堵状态。
7.进一步地,所述窗口计算单元将时间段按照图像输入频率划分成多段具体为将多个时间点计算结果反馈为时间段的计算结果的方法。
8.进一步地,所述车辆颜色判断单元识别处于重叠区域位置的叠放车辆颜色是否一致的方法具体为步骤s1:转换车辆图像颜色,从bgr转换为hsv;步骤s2:拆分hsv蒙皮,根据蒙皮得到颜色面板和亮度面板;步骤s3:3.循环图像每一个像素,得到hsv直方图和亮度直方图;步骤s4:统计直方图中每种颜色规定的范围,最高者为车辆颜色。
9.进一步地,所述车辆拥堵计算单元根据当前所述车辆位置计算模块计算的车辆在所述图像信息中的图像位置及置信度比对所述缓存单元中的缓存数据,计算获得车辆的拥堵状态的方法具体为:
10.步骤s10:当所述车辆位置计算模块计算出的置信度低于设定参考值α的车辆位置信息,面积设为x0,x1,
……
,xn;
11.步骤s20:从所述缓存数据单元中获取时间窗口内最后一次车辆列表,面积设为y0,y1,
……
,ym;
12.步骤s30:循环所述车辆位置计算模块中的车辆位置列表,与缓存车辆列表的每一个位置进行交集,设交集面积为xn∩ym,则交集率计算:
[0013][0014]
如果找到缓存车辆列表中其中一个位置,交集率大于设定参考值β,且颜色一致,则覆盖缓存信息,设定当前时间点为真;
[0015]
如果找不到,在缓存车辆列表中新增一个车辆,并设定当前时间点为真;
[0016]
如果缓存车辆列表中没有被覆盖的位置设定当前时间点为假;
[0017]
步骤s40:计算每个位置在当前时间窗口内每个时间点的真假状态,每出现一个全为真的位置设定总数加1;当总数大于设定参考值γ时判断车辆处于拥堵状态。
[0018]
进一步地,所述视频图像转换模块包括视频接入单元、定时执行单元、图像采集单元、图像存储单元和本地消息队列,所述视频接入单元能够获取接入市场主流的视频设备输出信号,所述定时执行单元按照一定的时间间隔控制所述图像采集单元获取视频图像,所述图像采集单元通过设备抓图获取图像或者解析视频流获取图像,所述图像存储单元将所述图像采集单元获取的图像存入本地并向本地消息队列推送图像获取消息。
[0019]
进一步地,所述视频设备为任意支持国标gb28181、onvif、rtmp、rtp、webrtc等视频协议的视频设备,解析视频流获取图像具体为通过视频流解析后,从流中截取出图像,推送图像获取消息包括图像本地存储地址和设备信息。
[0020]
进一步地,所述车辆位置计算模块包括图像接收单元,图像预处理单元和人工智能模型推理单元,所述图像接收单元从本地消息队列获取图像信息,所述图像预处理单元将所述图像接收单元获取的图像裁剪出目标推理区域和缩放为人工智能模型输入的像素组合与通道数,人工智能模型推理单元接收预处理后的图像信息并推理出车辆在图像位置及置信度。
[0021]
进一步地,所述人工智能模型为基于深度学习网络mobilenet object_detection_v2模型,并通过大量采集车辆图片进行模型的优化训练,目标推理区域为系统启动时配置的矩形区域,人工智能模型输入的像素组合与通道数为图像像素值与通道数为,图像位置为相对于图像像素值的矩形区域,置信度为图像为车辆且出现在图像位置的可信程度,在0到1之间浮动。
[0022]
进一步地,还包括:物联网模块和智能联动模块,所述物联网模块接收所述拥堵状态识别模块的输入结果并上传至智能联动模块,所述智能联动模块根据接收到的车辆拥堵状态信息的态势变化实时联动周边车辆疏导装置。
[0023]
相比于现有技术,本发明能达到的有益效果为:
[0024]
由于本发明灵活设置检测拥堵车辆数,设置触发拥堵触发时长,检测结果以告警事件形式输出自动通知相关管理人员,并支持联动控制对应的疏导装置,实现车辆自动导流。比较传统管理方案,通过该技术降低管理的用人成本,提升故障处理响应时间,让车辆通行更顺畅。
附图说明
[0025]
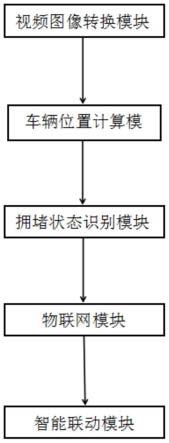
图1所示为本发明视频ai识别车辆的拥堵状态的系统流程示意图;
[0026]
图2所示为本发明视频ai识别车辆的拥堵状态的系统中示意图视频图像转换模块工作示意图;
[0027]
图3所示为本发明视频ai识别车辆的拥堵状态的系统中物联网模块和智能联动模块工作示意图。
具体实施方式
[0028]
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0029]
如图1所示,本发明实施例公开了一种视频ai识别车辆的拥堵状态的系统的流程图。本实施例提供的视频ai识别车辆的拥堵状态的方法适用于进行高效的车辆拥堵管理,实现车辆的自动导流,具体应用于包括终端设备、网络和服务器构成的招聘信息匹配系统,其中网络为用于在终端设备和服务器直接提供通信链路的介质,其可以包括各种连接类型,例如有线、无线通信链路或者光纤电缆等等;终端设备上的操作系统可以包括手持设备操作系统(iphone operating system,ios系统)、安卓系统或其他操作系统,终端设备通过网络连接到服务器以实现交互,从而进行接收或发送数据等操作,具体可以是具有显示屏并且支持网页浏览的各种电子设备,包括但不限于智能手机、平板电脑、便携式计算机和台式服务器等等。本实施例可适用于人工智能管理车辆拥堵转态的情况,实现大数据车辆同行调度。典型的适用于社区、园区、商业体、景区管理。该视频ai识别车辆的拥堵状态系统可以由软件和/或硬件的方式实现。在执行本视频ai识别车辆的拥堵状态的系统之前,先预设置信度参考值α,具体的参考值α为识别结果的可信程度,根据实际检测环境与人工需要的准确率要求,配置0到1之间的小数值;交集率参考值参考值β,具体的参考值β表示两次识别结果的重叠程度:设定1需要两者包含关系,设定0则不需要相交即认定为同一位置,设定0到1之间则需要相交才能认定为同一位置;数值越大,认定同一位置要求重叠的面积就越大,拥堵状态车辆的临界参考值γ,具体的参考值γ为指定需求的拥堵的车辆最小值,例如设定5台车,则该路段出现6台车以上为判断拥堵的必要条件。
[0030]
参见图1,本实施例提供视频ai识别车辆的拥堵状态的系统,包括:
[0031]
视频图像转换模块,将视频图像转换成图像信息;具体的,如图2所示,在本实施例中,所述视频图像转换模块包括视频接入单元、定时执行单元、图像采集单元和图像存储单元,所述视频接入单元能够获取接入市场主流的视频设备输出信号,所述定时执行单元按照一定的时间间隔控制所述图像采集单元获取视频图像,所述图像采集单元通过设备抓图获取图像或者解析视频流获取图像,所述图像存储单元将所述图像采集单元获取的图像存入本地形成本地消息队列并推送图像获取消息。进一步,为增加本系统通用性,所述视频设备为任意支持国标gb28181、onvif、rtmp、rtp、webrtc等视频协议的视频设备,解析视频流获取图像具体为通过视频流解析后,从流中截取出图像,推送图像获取消息包括图像本地存储地址和设备信息。
[0032]
车辆位置计算模块,计算车辆在所述图像信息中的图像位置及置信度;具体的,所述车辆位置计算模块包括图像接收单元,图像预处理单元和人工智能模型推理单元,所述图像接收单元从本地消息队列获取图像信息,所述图像预处理单元将所述图像接收单元获
取的图像裁剪出目标推理区域和缩放为人工智能模型输入的像素组合与通道数,人工智能模型推理单元接收预处理后的图像信息并推理出车辆在图像位置及置信度;所述人工智能模型为基于深度学习网络mobilenet object_detection_v2模型,并通过大量采集车辆图片进行模型的优化训练,获得更优的推理效果;目标推理区域为系统启动时配置的矩形区域,可以减少图像上无效数据的影响;人工智能模型输入的像素组合与通道数为图像像素值与通道数为640
×
640
×
3,图像位置为相对于图像像素值的矩形区域,置信度为图像为车辆且出现在图像位置的可信程度,在0到1之间浮动,当置信度越接近于1时,表示车辆且出现在图像位置越接近车辆的实际真实位置,结果越可信。
[0033]
拥堵状态识别模块,具有窗口计算单元、车辆颜色计算单元、数据缓存单元和拥堵状态计算单元,所述窗口计算单元将时间段按照图像输入频率划分成多段,所述车辆颜色计算单元识别处于重叠区域位置的叠放车辆颜色是否一致,所述数据缓存单元存储缓存车辆列表中的车辆位置信息,所述车辆拥堵计算单元根据当前所述车辆位置计算模块计算的车辆在所述图像信息中的图像位置及置信度比对所述缓存单元中的缓存车辆列表数据信息,计算获得车辆的拥堵状态。
[0034]
具体的,所述窗口计算单元将时间段按照图像输入频率划分成多段具体为将多个时间点计算结果反馈为时间段的计算结果的方法;所述车辆颜色判断单元识别处于重叠区域位置的叠放车辆颜色是否一致的方法具体为步骤s1:转换车辆图像颜色,从bgr转换为hsv;步骤s2:拆分hsv蒙皮,根据蒙皮得到颜色面板和亮度面板;步骤s3:3.循环图像每一个像素,得到hsv直方图和亮度直方图;步骤s4:统计直方图中每种颜色规定的范围,最高者为车辆颜色;所述车辆拥堵计算单元根据当前所述车辆位置计算模块计算的车辆在所述图像信息中的图像位置及置信度比对所述缓存单元中的缓存数据,计算获得车辆的拥堵状态的方法具体为:
[0035]
步骤s10:当所述车辆位置计算模块计算出的置信度低于设定参考值α的车辆位置信息,面积设为x0,x1,
……
,xn;
[0036]
步骤s20:从所述缓存数据单元中获取时间窗口内最后一次车辆列表,面积设为y0,y1,
……
,ym;
[0037]
步骤s30:循环所述车辆位置计算模块中的车辆位置列表,与缓存车辆列表的每一个位置进行交集,设交集面积为xn∩ym,则交集率计算:
[0038][0039]
如果找到缓存车辆列表中其中一个位置,交集率大于设定参考值β,且颜色一致,则覆盖缓存信息,设定当前时间点为真;
[0040]
如果找不到,在缓存车辆列表中新增一个车辆,并设定当前时间点为真;
[0041]
如果缓存车辆列表中没有被覆盖的位置设定当前时间点为假;
[0042]
步骤s40:计算每个位置在当前时间窗口内每个时间点的真假状态,每出现一个全为真的位置设定总数加1;当总数大于设定参考值γ时判断车辆处于拥堵状态。
[0043]
另外,为增加本系统的智能性和功能性,如图3所示,本系统还包括:物联网模块和智能联动模块,所述物联网模块接收所述拥堵状态识别模块的输入结果并上传至智能联动模块,所述智能联动模块根据接收到的车辆拥堵状态信息的态势变化实时联动周边车辆疏
导装置,实现车辆量智能调度,缓解拥堵情况。进一步的,所述车辆疏导装置为指示灯、道闸等任意用于引导、放行车辆的设备或系统;所述智能联动模块为通过接收物联网模块上报的车辆拥堵状态数据,动态调度和控制车辆疏导装置进入相应运行状态,实现车辆量智能调度,缓解拥堵情况,提升通行效率。
[0044]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1