一种基于人体识别的运动动作判定方法与流程
1.本发明涉及运动动作判定技术领域,具体是一种基于人体识别的运动动作判定方法。
背景技术:
2.随着现代中小学生体质健康数据持续下滑,中小学生近视率、肥胖率持续增高。中小学生在进行体质锻炼的运动动作一般是跟随着教学视频或者老师学习的,在学生自主的进行体质锻炼时,无法的判断自己的运动动作是否正确,不掌握正确的体质锻炼技巧,体质健康也无法得到良好的提升效果。为此,我们提出一种基于人体识别的运动动作判定方法。
技术实现要素:
3.本发明的目的在于提供一种基于人体识别的运动动作判定方法,以解决现有技术中的问题。
4.为实现上述目的,本发明提供如下技术方案:一种基于人体识别的运动动作判定方法,包括以下步骤:
5.s1:对于待识别对象人员,采用ai识别捕捉该待识别对象的图像,在该图像中是识别待识别对象的多个骨骼关键点的三维位置坐标z及四元数位置坐标,将捕捉的骨骼关节特征点与真实骨骼进行动作联动,将头部特征点与人体运动动作进行联动;
6.s2:利用获得的骨骼关键点的三维位置坐标z,计算待识别对象骨骼关键点的运动轨迹t1;然后利用获得的运动轨迹计算每段骨骼的运动角度α,根据科学政策设置判别指标的值域,将处理后的结果与值域进行判定;
7.s3:通过ai识别采集人体深度图像信息,结合骨骼关节四元数位置坐标,利用3d图形学进行数据处理,获得运动类型、运动量、运动动作;并以此作为判别指标进行运动动作判断识别;
8.s4:通过骨骼追踪捕获到的覆盖人体的15个骨骼关节特征点示意图,实现关节点捕捉、图像数据输出、三维空间位置数据输出以及四元数位置数据输出,输出对象为覆盖人体的15个骨骼特征点。
9.优选的,所述s3具体包括如下步骤:
10.s31:选择目标骨骼关节特征点以及其父关节点,方向为子关节指向父关节;
11.s32:利用3d图形学进行数据处理,使将关节特征点的四元数转化为三个欧拉角;
12.s33:结合被测人体与ai识别设备的位置和角度,选定地面坐标系与旋转坐标系位置和方向,确定欧拉角的位置;
13.s34:分析骨骼关节点的欧拉角角度信息,结合两个坐标系确定一对父子关节之间的骨骼三向旋转角度,以此进行人体运动动作判断识别;
14.s35:将上述判别指标及其判别结果进行分析处理,由此对人体运动动作进行综合识别。
15.优选的,所述s33中的欧拉角包括俯仰角、偏航角、翻滚角。
16.优选的,所述s1中选定体外地面基准点的位置,将双脚置于预设参考点处,由于人体为立体模型,故头部骨骼关节点坐标视为基准点空间坐标。
17.优选的,所述s1中将跳跃运动以双脚到地面参考点的距离作为运动动作离地距离的判别指标,将双肩特征点与手部动作进行联动作为运动类型的判别指标,以双肩高度差作为运动成绩的判别指标,以胸椎-腰椎-尾椎的夹角作为运动动作标准的判别指标,利用几何学和参考点坐标得到特征点相关的不同参数,并以此作为动作识别判定指标。采用ai识别捕捉该待识别对象的图像。
18.与现有技术相比,本发明的有益效果是:运用智能ai识别,通过人体骨骼关键节点、动作识别技术来提醒锻炼者在锻炼过程中保持正确的运动动作,为中小学生的体质健康提升提供帮助,具有相当的实际意义;
19.通过采用ai识别捕捉人骨骼关键点、三维位置坐标,利用上述捕捉的结果对人体运动动作判断,准确性和方便性高,同时成本低廉,高效的解决了中小学生运动动作判定的问题;
20.本发明实现关节点捕捉、图像数据输出、三维空间位置数据输出以及四元数位置数据输出,通过ai识别采集人体深度图像信息,结合三维骨骼关节特征坐标,利用几何学进行数据处理,并将处理结果作为判别指标进行运动动作判断。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
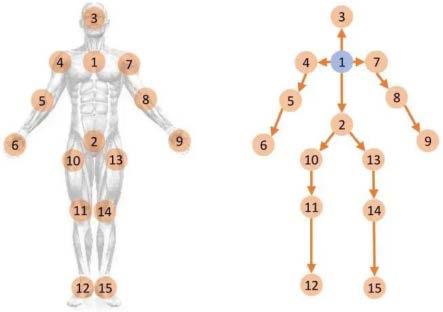
22.图1是本发明的骨骼关节特征点示意图;
23.图2是本发明运动的运动图。
具体实施方式
24.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
25.请参阅图1-2,本发明实施例中,一种基于人体识别的运动动作判定方法,包括以下步骤:
26.s1:对于待识别对象人员,采用ai识别捕捉该待识别对象的图像,在该图像中是识别待识别对象的多个骨骼关键点的三维位置坐标z及四元数位置坐标,将捕捉的骨骼关节特征点与真实骨骼进行动作联动,将头部特征点与人体运动动作进行联动;
27.s2:利用获得的骨骼关键点的三维位置坐标z,计算待识别对象骨骼关键点的运动
轨迹t1;然后利用获得的运动轨迹计算每段骨骼的运动角度α,根据科学政策设置判别指标的值域,将处理后的结果与值域进行判定;
28.s3:通过ai识别采集人体深度图像信息,结合骨骼关节四元数位置坐标,利用3d图形学进行数据处理,获得运动类型、运动量、运动动作;并以此作为判别指标进行运动动作判断识别;
29.s4:通过骨骼追踪捕获到的覆盖人体的15个骨骼关节特征点示意图,实现关节点捕捉、图像数据输出、三维空间位置数据输出以及四元数位置数据输出,输出对象为覆盖人体的15个骨骼特征点。
30.优选的,所述s3具体包括如下步骤:
31.s31:选择目标骨骼关节特征点以及其父关节点,方向为子关节指向父关节;
32.s32:利用3d图形学进行数据处理,使将关节特征点的四元数转化为三个欧拉角;
33.s33:结合被测人体与ai识别设备的位置和角度,选定地面坐标系与旋转坐标系位置和方向,确定欧拉角的位置;
34.s34:分析骨骼关节点的欧拉角角度信息,结合两个坐标系确定一对父子关节之间的骨骼三向旋转角度,以此进行人体运动动作判断识别;
35.s35:将上述判别指标及其判别结果进行分析处理,由此对人体运动动作进行综合识别。
36.优选的,所述s33中的欧拉角包括俯仰角、偏航角、翻滚角。
37.优选的,所述s1中选定体外地面基准点的位置,将双脚置于预设参考点处,由于人体为立体模型,故头部骨骼关节点坐标视为基准点空间坐标。
38.优选的,所述s1中将跳跃运动以双脚到地面参考点的距离作为运动动作离地距离的判别指标,将双肩特征点与手部动作进行联动作为运动类型的判别指标,以双肩高度差作为运动成绩的判别指标,以胸椎-腰椎-尾椎的夹角作为运动动作标准的判别指标,利用几何学和参考点坐标得到特征点相关的不同参数,并以此作为动作识别判定指标。采用ai识别捕捉该待识别对象的图像。
39.如图2所示,图中是将头部与四肢进行动作联动后,人体运动动作的判别指标示意图,将捕捉的骨骼关节特征点与真实骨骼进行动作联动。由于头部的活动幅度不明显,故将双肩特征点与人体四肢动作进行联动,在数据库查找,找到运动类型,并利用几何学得到双脚到地面参考点的距离,得出离地距离差,以作为运动运动的判别指标,如跳跃运动正常中小学生离地距离差基准点绝对距离在200mm~400mm之间即为正常值,双肩抖动幅度<15
°
,参数不在范围之内,属于成绩无效,反之成绩有效上传至智能中枢系统,并且生成运动处方,优化中小学生运动动作方式。
40.本发明的工作原理是:s1:对于待识别对象人员,采用ai识别捕捉该待识别对象的图像,在该图像中是识别待识别对象的多个骨骼关键点的三维位置坐标z及四元数位置坐标,将捕捉的骨骼关节特征点与真实骨骼进行动作联动,将头部特征点与人体运动动作进行联动;s2:利用获得的骨骼关键点的三维位置坐标z,计算待识别对象骨骼关键点的运动轨迹t1;然后利用获得的运动轨迹计算每段骨骼的运动角度α,根据科学政策设置判别指标的值域,将处理后的结果与值域进行判定;s3:通过ai识别采集人体深度图像信息,结合骨骼关节四元数位置坐标,利用3d图形学进行数据处理,获得运动类型、运动量、运动动作;并
以此作为判别指标进行运动动作判断识别;s4:通过骨骼追踪捕获到的覆盖人体的15个骨骼关节特征点示意图,实现关节点捕捉、图像数据输出、三维空间位置数据输出以及四元数位置数据输出,输出对象为覆盖人体的15个骨骼特征点。
41.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1