基于广义时变系统辨识模型的数据滤波加速梯度搜索参数估计算法
1.本发明涉及一种基于广义时变系统辨识模型的数据滤波加速梯度搜索参数估计算法。
背景技术:
2.随着新能源技术的发展,直流电动机作为执行机构重要的驱动单元,广泛应用在工程实践中。直流电动机其控制系统具有随机干扰,非线性,时变等特点,而且,电动机工作在高温、潮湿、复杂的环境下,内部变量测量极为困难,且参数随负载变化产生时变特性。其实验分析有时是无法实现的。用数值分析法建立直流电动机的数学模型,从而实现在运行范围和不同负载条件下对直流电动机系统进行仿真、分析和控制,从而进行系统参数的估计。
3.广义时变系统的时变参数受扰动量的影响,可表示为扰动量的函数,在化工、电力拖动等实践过程中广泛存在,其可以分析时变系统的参数变化规律,在系统辨识中受到了广泛的关注。广义时变系统的辨识模型适用范围广还可以对时不变系统,双线性系统进行建模,对各种系统具有很好的描述效果。本发明采用数据滤波的加速梯度搜索算法对基于广义时变系统辨识模型的他励直流电动机调速系统进行参数辨识。
技术实现要素:
4.本发明旨在用一种基于广义时变系统辨识模型的数据滤波加速梯度搜索参数估计算法对他励直流电动机的调速系统模型参数进行估计。
5.本发明的技术解决方案是:应用数据滤波技术,设计一个线性滤波器对测量数据进行滤波,将原始识别模型转化为滤波识别模型和噪声识别模型,并在梯度搜索算法中增加动量项来提高算法的收敛速度。
6.1)构建基于广义时变系统的辨识模型,具体步骤如下:
7.第一步:广义时变系统模型表达式如下:
[0008][0009][0010][0011][0012]
上述公式中各符号的含义:u(t)和o(t)分别是系统的输入和输出,xi(t)和yi(t)是系统的时变参数,x
ij
和y
ij
是参数的系数,ρi(t)是系统的扰动,w(t)为有色噪声,v(t)是一个零均值为零、方差为σ2且满足高斯分布的白噪声。
[0013]
第二步:构建广义时变系统模型的中间变量o1(t)、w(t)的关系式如下:
[0014]
o1(t)=φ
t
(t)ξψ(t)+v(t),
[0015]
w(t)=ξ
t
(t)θ+v(t).
[0016]
第三步:得到广义时变系统的辨识模型为:
[0017]
o(t)=φ
t
(t)ξψ(t)+ξ
t
(t)θ+v(t).
[0018]
第四步:构建数据滤波器:
[0019][0020]
第五步:使用数据滤波器过滤输入输出数据:
[0021][0022][0023][0024]
第六步:得到广义时变系统滤波后的辨识模型为:
[0025][0026]
2)构建数据滤波加速梯度搜索参数估计算法流程:
[0027]
第一步:启动辨识算法;
[0028]
第二步:令k=0,设置相关中间变量的初始值;
[0029]
第三步:采集他励直流电动机的电枢电压,输出角速度和励磁电流数据作为模型的输入输出数据和可测扰动数据,并进行数据滤波处理,构造和
[0030]
第四步:令k=0,构建信息向量和可测干扰向量ψ(t);
[0031]
第五步:计算步长μ1;
[0032]
第六步:构建滤波后信息向量
[0033]
第七步:计算步长μ2;
[0034]
第八步:更新系数矩阵和参数向量
[0035]
第九步:计算和
[0036]
第十步:若k=k+1并重复第六步到第九步。否则,得到参数估计和
[0037]
第十一步:结束流程。
[0038]
其中各变量的定义如下:
[0039]
定义输入量u(t),输出量o(t),扰动量ρi(t);
[0040]
定义w(t)为有色噪声中间变量,v(t)是一个均值为零、方差为σ2且满足高斯分布的白噪声;
[0041]
定义ξ为系数矩阵,θ为参数向量;
[0042]
定义为滤波后的系统输出,为滤波后的系统输出;
[0043]
定义为系数矩阵ξk第k次迭代的估计值;为系数向量θ第k次迭代的估计值;
[0044]
3)根据数据滤波加速梯度辨识算法流程,构建其算法:
[0045][0046][0047][0048]
[0049][0050][0051][0052][0053][0054][0055][0056][0057][0058]
φ(t)=[-o(t-1),-o(t-2),
···
,-o(t-n
x
),u(t-1),u(t-2),
···
,u(t-ny)]
t
,(14)
[0059][0060]
ψ(t)=[1,ρ1(t),ρ2(t),
···
,ρ
p-1
]
t
.(16)
[0061]
上述算法的具体步骤:
[0062]
1.启动辨识算法,令k=0,数据长度为l,设置初始值:n1=n
x
+ny,n2=nr+nq,,p0=106,其中p0是一个极大的数值,设置ε=10-3
。
[0063]
2.获取他励直流电动机的电枢电压数据作为输入数据,电动机输出角速度数据作为输出数据,励磁电流数据作为可测扰动数据,并进行数据滤波。
[0064]
3.通过式(14)、(15)和(16)计算φ(t)、和ψ(t);
[0065]
4.通过式(7)计算μ2;
[0066]
5.通过式(13)构造
[0067]
6.通过式(5)计算μ1;
[0068]
7.通过式(3)、(4)和(8)计算hk,mk和ek(t);
[0069]
8.通过式(2)、式(7)刷新迭代所估计的
[0070]
9.通过式(9)、式(10)计算噪声估计序列
[0071]
10.k加1并重复第5步到第9步;否则,进行第11步;
[0072]
11.获得系数矩阵估计和参数向量估计
[0073]
12.结束辨识;
[0074]
其中各变量的定义如下:
[0075]
定义输入量u(t),输出量o(t),扰动量ρi(t);
[0076]
定义ψ(t)是扰动量构成的可测干扰向量;
[0077]
定义ξ为系数矩阵;
[0078]
定义θ为参数向量;
[0079]
定义为第k次迭代ξ的估计值;为第k次迭代θ的估计值;
[0080]
定义为噪声估计;
[0081]
定义μ1,μ2表示两个迭代步长。
[0082]
本发明估计精度高,收敛速度快,可适用于他励直流电动机广义时变辨识模型的参数估计。
附图说明
[0083]
下面结合附图和实施例对本发明作进一步说明。
[0084]
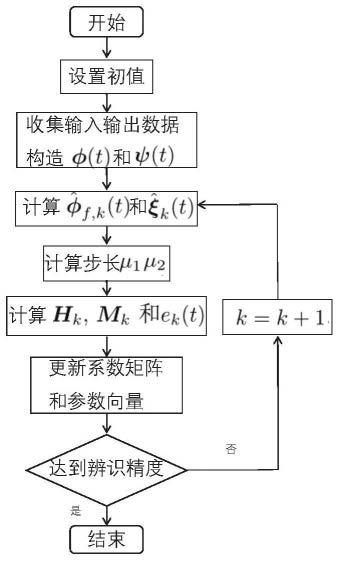
图1是该系统的数据滤波加速梯度搜索估计算法的流程图。
[0085]
图2是本发明方法的具体实例示意图。把大量收集的直流电动机的电枢电压数据作为输入数据,输出角速度作为输出数据,励磁电流作为扰动量,进行数据预处理之后,采用该参数估计算法运行之后,得到如图2所示,其中δ为参数估计误差,η为算法中的动量因子。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1