一种智能求解车桥系统随机信号的方法
1.本发明涉及车桥耦合系统技术领域,具体为一种智能求解车桥系统随机信号的方法。
背景技术:
2.近些年来,由于国内经济的加速,基建的投入不断加大,各地的桥梁拔地而起,随着桥梁的不断增加,行车效应的问题不得不正视,尤其对于车桥耦合振动响应的研究显得十分必要,对于桥梁行车的舒适性、安全性、稳定性还是桥梁健康的研究都有着重要的作用。就比如列车行车频率增加、随着速度的不断提高列车与轨道冲击加大动能增大,以及施工新的技术、新材料等等。直接影响了桥梁的使用寿命,列车在桥梁上行驶时,会使得桥梁产生振动,也可以说桥梁的振动大部分就是由车辆引起的,速度的提高还会对列车的运行安全和平稳性带来了严峻的挑战,因此车桥耦合振动过程中就需要准确的评估系统的动力性能。计算车桥耦合振动的过程中依然会存在着各种问题,比如计算数量以及模型计算时包括的信息越多就越精确。在运算硬件水平一定的前提下,随着计算模型的不断提高,从二维到三维,再到精细化建模带来的算法上的挑战。
3.20世纪中叶以来,不确定车桥模型的分析获得长足的发展,在这之前在为模拟车桥相互作用(vehicle-bridge interaction vbi)系统的行为而建立的数值模型中,通常假定车辆和桥梁的参数是确定性的。时常通过在一定范围内设置一系列预定值来考虑参数的变化,具有确定性,然后结合不同值的参数进行分析。然而,在实际应用中,桥梁和车辆都受到各种不确定性的影响,这些不确定性通常难以预测。因此,这种参数离散值有限的确定性分析不一定代表不确定性vbi系统参数的特性。准确预测车桥系统响应需要合理考虑这些不确定性。目前分析不确定参数的方法有概率法、模糊方法、区间方法、人工神经网络算法。人工神经网络由于其强大的非线性映射能力,预计人工神经网络可以为工程的动态响应分析提供一种有前途的工具。近期越来越多的学者尝试开发深度神经网络模型来预测由风荷载或地震作用产生的结构动态响应。
4.现有的大多数基于神经网络的研究都是以确定性的方式进行的,这意味着神经网络代理模型只能在给定相应网络输入的情况下产生确定性的动态响应输出。此外,迄今为止,关于基于神经网络模型的桥梁车辆诱发振动预测的文献非常稀少。虽然动态相互作用涉及与车辆和桥梁相关的许多参数和复杂的机械机制,以及大量短时步长上的迭代数值积分,但不断发展的深度学习技术为研究车辆引起桥梁振动的有效方法提供了新工具分析。神经网络模型的参数是不确定性参数,并且随机参数的响应是从训练数据中获得的。
5.对于近些年来,工程项目的不断推进以及复杂程度的变化,迫切的需要一种简便合理且高效的算法用于解决环境和生产时给结构带来的参数不确定的问题。传统的方法对于计算不确定模型不仅费时费力且计算效率的低下足以让人望而却步,显然无法满足学者的需求。
技术实现要素:
6.针对上述问题,本发明的目的在于提供一种智能求解车桥系统随机信号的方法,设计了一个混合算法,将人工智能算法中的深度学习网络引用到车桥耦合系统响应的求解当中,有效的把人工智能算法和随机虚拟激励法进行结合,即spem-cnn-lstm。需要通过spem(software process engineering meta-model 软件过程工程元模型)计算得到不确定性车桥系统响应样本,把获得的不确定车桥系统响应样本作为输出数据,通过构造的随机虚拟激励样本作为输出数据,把输出数据和输入数据一同输入到卷积长短时组合神经网络中进行训练与预测。其集合了卷积神经网络和长短时记忆网络的优点,利用卷积的强大特征提取能力来克服车桥系统激励输入数据的高维性,并使用lstm(long short term memory长短期记忆)层的时间序列估计来实现时域桥梁振动的逐点预测。人工神经网络由于其强大的非线性映射能力,可以为工程的动态响应分析提供一种有前途的工具。技术方案如下:一种智能求解车桥系统随机信号的方法,包括以下步骤:步骤1:通过商业有限元软件ansys建立车辆模型和桥梁模型,根据解析解验证车辆模型的自振频率和桥梁模型自振频率,并根据计算得到的桥梁模型的自振频率及模态验证桥梁模型的正确性;步骤2:确定车辆模型和桥梁模型参数的变异系数cov,依据变异系数cov和均值通过monte carlo抽样获得随机参数;步骤3:明确车辆和桥梁不确定模型样本数量,将随机参数结合模型带入ansys中获得车辆和桥梁不确定模型模态和自振频率;步骤4:依据随机虚拟激励法原理,将车辆和桥梁不确定模型的模态数据与轨道不平顺激励样本代入车桥耦合随机振动系统中,求出车桥耦合随机振动系统响应数据;步骤5:根据构造的随机虚拟激励,把随机虚拟激励样本分为正弦和余弦激励样本,分别带入车桥耦合随机振动系统,并计算车桥耦合随机振动系统的正弦和余弦响应样本;步骤6:根据求解得到的正弦和余弦响应样本,结合空间频率进行梯形积分,得到系统响应统计量,得到大量响应样本;步骤7:随机选取若干条预定长度的轨道不平顺激励样本作为输入数据,将车桥耦合随机振动系统响应作为输出数据;步骤8:验证cnn-lstm深度学习组合网络的预测正确性,结合实际数据在训练之前对cnn-lstm深度学习组合网络进行超参数设置;步骤9:通过选定输入数据和输出数据将其代入cnn-lstm深度学习组合网络中,通过卷积层对所述若干条预定长度的轨道不平顺激励进行卷积运算,采用spem-cnn-lstm混合算法得到激励样本数据特征,最后输入lstm层进行时间序列训练;步骤10:完成训练后,依据需要对不确定车桥系统响应进行智能预测;步骤11:通过cnn-lstm深度学习组合网络得到更多的车桥耦合随机振动系统响应样本;根据响应样本求得其标准差或是方差。
7.进一步的,所述spem-cnn-lstm混合算法,包括两个模块,第一个模块为spem模块,用于求解出大量的随机系统响应,第二个模块为cnn-lstm模块,用于完成输入数据的特征
提取以及随机响应的预测工作;其中cnn-lstm模块包括5个卷积层和5个池化层、一个特征学习lstm层和一个lstm输出层,一个dropout layer用于防止过拟合,以及平滑和全连层;卷积核为20
×
20,通道数量为1,池化层的池化区域为1
×
2,通道为1,与卷积相对应。
8.更进一步的,所述步骤9中提取轨道不平顺激励样本数据特征具体为:所述spem-cnn-lstm混合算法中cnn-lstm神经网络由两个神经网络组合而成,其中一个为特征提取网络,另一为长短时记忆网络网,首先对构造的随机虚拟激励进行卷积运算,其提取的特征数据为:(1)式中,f(
·
)表示卷积网络输出层对应值,表示第l层第j个特征提取数据,代表第l-1层第i个数据虚拟激励数据,代表l层第i到j阶卷积核大小,*代表卷积核k在第l-1层所有关联的feature maps上做卷积运算,代表网络参数,mj为所属总的求和数量。
9.更进一步的,所述步骤10中对不确定车桥系统响应的智能预测具体为:通过卷积提取特征数据输入到lstm层进行预测,将公式(1)中获得的特征数据值输入到长短时记忆网络中,进行标记和预测,具体计算公式如下所示:(2)上式中,g(
·
)表示长短时记忆网络模型中的激励函数;wi代表输入数据的信号和单个神经元相连接的权重值;bf代表偏置值反映了神经元内部的状态;y
l
表示神经元的输出第l层的预测值。
10.与现有技术相比,本发明的有益效果是:本发明主要是通过spem计算得到不确定性车桥系统响应样本,把获得的不确定车桥系统响应样本作为输出数据,通过构造的随机虚拟激励样本作为输出数据,把输出数据和输入数据一同输入到卷积长短时组合神经网络中进行训练与预测。此法利用了卷积的强大特征提取能力来克服车桥系统激励输入数据的高维性,并使用lstm层的时间序列估计来实现时域桥梁振动的逐点预测。通过使用多层cnn网络提取轨道不平顺激励数据的空间特征,同时运用两层lstm网络捕捉序列的时间依赖数据特征,即一个特征学习lstm层和一个lstm输出层。通过深度学习将简化车辆模型和桥梁模型的建立以达到缩短计算时间的目的,同时能建立不确定模型,准确预测不确定车桥系统响应。通过此方法得到的样本预测误差在工程允许范围内,效果能达到实际需要,对于解决传统的建模难、计算过程复杂等问题提供了有效解决途径,将推动人工智能在传统工程中的应用。
附图说明
11.图1为神经元模型图。
12.图2为长短时记忆网络图。
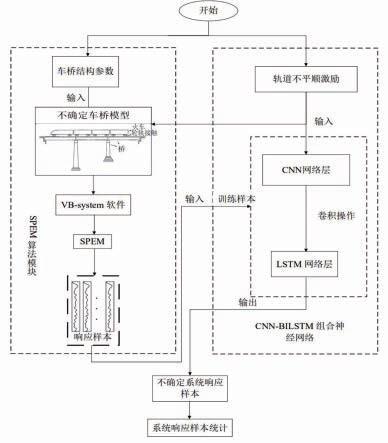
13.图3为基于spem-cnn-lstm混合算法计算流程图。
14.图4为spem-cnn-lstm神经网络架构图。
15.图5为 matlab中cnn-lstm网络流程图。
16.图6(a)为车桥系统响应误差和损失曲线图之桥梁竖向位移标准差。
17.图6(b)为车桥系统响应误差和损失曲线图之桥梁竖向加速度标准差。
18.图7为训练模型学习率下降图。
19.图8为cnn-lstm模型预测桥梁竖向位移图。
20.图9为cnn-lstm模型预测桥梁竖向加速度图。
21.图10为cnn-lstm模型预测车辆竖向位移图。
22.图11为cnn-lstm模型预测车辆竖向加速度图。
23.图12(a)为cnn-lstm模型预测桥梁系统均值及误差图之桥梁竖向位移均值。
24.图12(b)为cnn-lstm模型预测桥梁系统均值及误差图之桥梁位移均方根误差。
25.图12(c)为cnn-lstm模型预测桥梁系统均值及误差图之桥梁竖向加速度均值。
26.图12(d)为cnn-lstm模型预测桥梁系统均值及误差图之桥梁加速度均方根误差。
27.图13(a)为cnn-lstm模型预测车辆系统均值及误差图之车辆竖向位移均值。
28.图13(b)为cnn-lstm模型预测车辆系统均值及误差图之车辆位移均方根误差。
29.图13(c)为cnn-lstm模型预测车辆系统均值及误差图之车辆竖向加速度均值。
30.图13(d)为cnn-lstm模型预测车辆系统均值及误差图之车辆加速度均方根误差。
31.图14(a)为cnn-lstm模型预测桥梁系统标准差及误差图之桥梁竖向位移标准差。
32.图14(b)为cnn-lstm模型预测桥梁系统标准差及误差图之桥梁竖向位移绝对误差。
33.图14(c)为cnn-lstm模型预测桥梁系统标准差及误差图之桥梁竖向加速度标准差。
34.图14(d)为cnn-lstm模型预测桥梁系统标准差及误差图之桥梁竖向加速度绝对误差。
35.图15(a)为cnn-lstm模型预测车辆系统标准差及误差图之车辆竖向位移标准差。
36.图15(b)为cnn-lstm模型预测车辆系统标准差及误差图之车辆竖向位移绝对误差。
37.图15(c)为cnn-lstm模型预测车辆系统标准差及误差图之车辆竖向加速度标准差。
38.图15(d)为cnn-lstm模型预测车辆系统标准差及误差图之车辆竖向加速度绝对误差。
具体实施方式
39.下面结合附图和具体实施例对本发明做进一步详细说明。
40.本发明为了加快训练过程制定并实现了集成反向传播算法,所提出的方法在高速
铁路桥梁上进行了验证,经过实验验证的三维车桥耦合模型被用来生成训练数据集,使用本方法描述的概念来设计和开发一个spem-cnn-lstm混合算法。本算法分为二个重要模块,第一个模块为spem模块,目的是求解出大量的随机系统响应,第二个模块为卷积神经网络-长短时记忆网络(cnn-lstm)模块,是为了完成输入数据的特征提取以及随机响应的预测工作。需要通过spem计算得到不确定性车桥系统响应样本,把获得的不确定车桥系统响应样本作为输出数据,通过构造的随机虚拟激励样本作为输出数据,把输出数据和输入数据一同输入到卷积长短时组合神经网络中进行训练与预测。通过使用多层cnn网络提取轨道不平顺激励数据的空间特征,同时运用两层及以上的lstm网络捕捉依赖数据特征的时间序列以达到随机响应预测的目的。通过此方法得到的样本预测误差在工程允许范围内,效果能达到实际需要,对于解决传统的建模难、计算过程复杂等问题提供了有效解决途径。
41.1)本发明采用的技术方案步骤如下:步骤1:通过商业有限元软件ansys建立车辆模型和桥梁模型,根据解析解验证车辆模型的自振频率和桥梁模型自振频率,并根据计算得到的桥梁模型的自振频率及模态验证桥梁模型的正确性。
42.所述桥梁模型为:(1)式中,mb、cb、kb分别表示桥梁质量矩阵、桥梁阻尼矩阵和桥梁刚度矩阵,分别表示桥梁加速度、速度和位移响应,fb表示桥梁受到的外力作用。
43.所述车辆模型为:(2)式中,mv、cv、kv分别表示车辆的质量矩阵、阻尼矩阵和刚度矩阵,分别表示车辆运动的加速度、速度和位移向量;fv表示作用在车辆上的外部激励力或荷载。
44.步骤2:确定车辆模型和桥梁模型参数的变异系数cov,依据变异系数cov和均值通过monte carlo抽样获得随机参数。
45.步骤3:明确车辆和桥梁不确定模型样本数量,将随机参数结合模型带入ansys中获得车辆和桥梁不确定模型模态和自振频率。
46.步骤4:依据随机虚拟激励法原理,将车辆和桥梁不确定模型的模态数据与轨道不平顺激励样本代入车桥耦合随机振动系统中,求出车桥耦合随机振动系统响应数据。
47.结构受平稳激励作用下其运动方程为:(3)其中,[m]、[c]、[k]分别表示n阶随时间变化的系统质量、阻尼和刚度矩阵,分别表示车桥系统响应的加速度、速度和位移向量,[p]表示作用力分布状况的n
×
m阶矩阵;{x(t)}表示为零均值平稳随机过程,其功率谱密度为[s
xx
(ω)]。
[0048]
线性系统受到自谱密度为s
xx
(ω)的单点平稳随机激励x(t)时,其响应y的自功率谱s
yy
(ω)应为:
(4)式中,h(ω)表示线性时不变系统的频率响应函数,代表输入、输出信号为同频率的简谐波,ω代表空间圆频率,a为服从高斯正态分布的随机振幅参数的变量。
[0049]
根据(4)式,将系统响应{y}的功率谱密度函数矩阵写为:(5)式中,[h(ω)]为系统频率响应函数矩阵,其中带*字符的为其共轭矩阵,带t的为其转置矩阵,其中激励功率谱密度函数矩阵为hermitian矩阵,对它进行分解得到以下关系:(6)式中,为自谱功率谱密度函数矩阵的激励分解矩阵,[a]为激励的下三角矩阵,为[a]的第k列矩阵,m表示总的阶数,t代表计算时长,e
iwt
与e-iwt
为复变函数,其中,i表示虚数,∑表示求和,这里是对向量进行求和。
[0050]
将式(6)代入(5)式中:(7)在结构平稳随机系统中,构造随机虚拟激励为:(8)式中,为零均值平稳随机过程,由欧拉公式得到,即。
[0051]
步骤5:根据构造的随机虚拟激励,把随机虚拟激励样本分为正弦和余弦激励样本,分别带入车桥耦合随机振动系统,并计算车桥耦合随机振动系统的正弦和余弦响应样本。
[0052]
随机激励作用下的第j阶第k列系统的响应为:(9)式中,表示第j阶振型参与系数。
[0053]
则第k阶随机激励作用下的随机振动响应为:(10)式中,r表示响应向量总数;表示第j阶的模态信息,表示第j阶线性时不变系统的频率响应函数。
[0054]
得到在随机激励作用下的结构随机虚拟响应:
(11)式中,表示第j阶第k列的结构响应。
[0055]
步骤6:根据求解得到的正弦和余弦响应样本,结合空间频率进行梯形积分,得到系统响应统计量,得到大量响应样本。
[0056]
将结构随机虚拟响应的统计量表示为:(12)式中,sign(
·
)为符号函数,为向量的转置向量,表示对a取绝对值。
[0057]
根据公式(8)得到非平稳的随机虚拟激励为:(13)式中,是服从零均值高斯分布的随机过程,g(t)表示非平稳特征的时变调制函数;进而得到非平稳随机虚拟激励作用下的系统响应:(14)式中,τ表示任意时刻;h(t-τ)表示脉冲响应函数、g(τ)任意时刻的调制函数;i(ω,t)表示调制简谐激励。
[0058]
则系统响应统计量为:(15)式中,sign(α)表示关于a的符号函数。
[0059]
步骤7:随机选取512条长度为600的轨道不平顺激励样本作为输入数据,将车桥耦合随机振动系统响应作为输出数据。
[0060]
步骤8:验证cnn-lstm深度学习组合网络的预测正确性,结合实际数据在训练之前对cnn-lstm深度学习组合网络进行超参数设置。
[0061]
步骤9:通过选定输入数据和输出数据将其代入cnn-lstm深度学习组合网络中,通过卷积层对512条激励进行卷积运算最后得到16条长度为600的特征激励,采用spem-cnn-lstm混合算法得到激励样本数据特征,最后输入lstm层进行时间序列训练。
[0062]
根据本发明设计的spem-cnn-lstm算法,其中cnn-lstm神经网络由两个神经网络组合而成,其中一个为特征提取网络,另一为长短时记忆网络网,首先对利用公式(8)构造的随机虚拟激励进行卷积运算,其提取的特征数据为:(16)式中,表示卷积网络输出层对应值,表示第l层第j个特征提取数据,上标l代表l层,l层对应有j个数据,代表第l-1层第i个数据虚拟激励数据,代表l层第i到j阶卷积核大小,*代表卷积核k在第l-1层所有关联的feature maps上做卷积运算,代表网络参数,mj为所属总的求和数量。
[0063]
本发明提出了一种混合算法,基于卷积和长短时记忆网络原理,依托matlab建立cnn-lstm神经网络模型,将spem与cnn-lstm神经网络进行组合。需要通过spem计算获得不确定性车桥系统响应样本,将获得的不确定车桥系统响应样本作为输出数据,通过构造的随机虚拟激励样本作为输出数据,把输出数据和输入数据一同输入到卷积长短时组合神经网络中进行训练与预测。不确定车桥耦合振动模型使用spem-cnn-lstm深度学习模型实现,具体见图3。此次模型采用了5个卷积层和5个池化层、一个特征学习lstm层和一个lstm输出层,一个dropout layer防止过拟合,最后是平滑和全连层。其中卷积核为20
×
20,通道数量为1,池化层的池化区域为1
×
2,通道为1,这与卷积相对应,如图4所示。本发明采用此神经网络算法对不确定车桥系统响应进行分析和预测,随机选取512条长为600的轨道不平顺激励作为输入数据。通过5层卷积和池化处理过后得到16条轨道不平顺特征数据,由于采用德国ice高速列车模型进行验证,一节车厢刚好有8个车轮,在仅考虑几何不平顺中的高低和方向不平顺,也就是每个轮子需要考虑两条激励,则一节车厢恰好需要16条随机轨道不平顺激励样本,正好与之对应。
[0064]
如图5所示,展示了matlab中spem-cnn-lstm组合网络完整的流程图,从轨道不平顺激励样本的输入到车桥系统响应样本的输出,一共经历了29个节点,对整个训练、预测过
程进行了可视化处理,这样可以根据每一个节点直观看出网络中存在的错误,以便自检。
[0065]
步骤10:完成训练后,依据需要对不确定车桥系统响应进行智能预测。
[0066]
通过卷积提取特征数据输入到lstm层进行预测,如图2所示为lstm原理图,将公式(16)获得的特征数据值输入到长短时记忆网络中,进行标记和预测,具体计算公式如下所示:(17)上式中,表示长短时记忆网络模型中的激励函数;wi代表输入数据的信号和单个神经元相连接的权重值;bf代表偏置值反映了神经元内部的状态;y
l
表示神经元的输出第l层的预测值。神经元模型图如图1所示。
[0067]
步骤11:通过cnn-lstm深度学习组合网络得到更多的车桥耦合随机振动系统响应样本;根据响应样本求得其标准差或是方差。
[0068]
系统响应统计量的方差具体为:平稳过程的均值和方差为:(18)(19)非平稳过程的均值和方差为:(20)(21)式中,e[α]表示a的数学期望或是均值,e[α]=0,v[α]表示a的方差值;r
yy
[0]表示零均值随机过程的方差值。
[0069]
2)误差分析为了验证本方法的可行性,需要对模型预测的误差进行系统的分析,误差分析作为重要的验证手段不可忽视,因此误差分析在深度学习中是非常重要的环节。即需要对神经网络模型生成的预测值进行误差分析,在数学中比较常用的有绝对误差(absolute error)、相对误差(relative error)还有均方根误差(root mean square error),其表达式如下:绝对误差:(22)相对误差:
(23)均方根误差:(24)上式中,ae代表绝对误差,re代表相对误差,rmse代表均方根误差,x
pred
代表神经网络的预测值,x
real
代表训练的输出值,n代表数量。本发明采用了均方根误差和相对误差作为主要的误差分析方法。
[0070]
3)实例分析采用德国ice高速列车模型,在车辆模型和桥梁模型的具体参数可以参考表2和表1。其中车辆模型为15个自由度。基于德国ice高速列车模型进行训练、预测,选取车身质量为随机参数mc=44000kg,变异系数为cov=0.035。采用spem计算5000个样本。根据spem计算得到的不确定车桥系统响应样本作为cnn-lstm网络的训练输出output,将轨道不平顺作为input输入数据。采用传统的monte carlo方法模拟产生不确定车桥响应样本与cnn-lstm预测样本进行对比。案例计算步长为0.004s,总步长为600步,车辆行驶速度为200km/h,轨道不平顺的空间频率区间为0.0016
·2·
π~0.2387
·2·
π。
[0071]
表1三跨简支桥梁参数表2弹性悬挂车辆模型参数
如图6(a)~图6(b)所示,显示了预测数据的均方根误差和总损失随着训练周期的变化而变化,为了保证模型的精度选择采用900个周期来训练cnn-lstm组合神经网络模型。在桥梁竖向位移、加速度以及车辆竖向位移、加速度中的相关损失随着模型迭代次数的不断增加变得越来越小,并且在第55个周期后缓慢下降。在给定模型的初始学习率为0.02,学习率下降周期为40,学习率下降因子为0.8,cnn-lstm模型会在设置的初始学习率的基础上不断调整每个迭代周期的学习率。如图7所示,展示了本次训练的过程中通过900次周期后学习率随着迭代周期增加而减小的趋势图。可以发现,在经过345次周期后学习率下降变得缓慢。
[0072]
通过将预测的结果抽取500条进行绘图,选取车桥系统中的位移、加速度数据绘制其样本图。如图8~图9所示,从桥梁系统响应图中可以看出,通过cnn-lstm深度学习模型训练得出来的系统响应样本,在均值线上下浮动,图中其曲线的变化也是随着系统响应均值的变化而变化,曲线的变化规律和系统响应均值一致。通过不确定桥梁系统响应的分析,可以发现车辆系统响应也同样是在均值上下浮动,如图10~图11所示。
[0073]
如图12(a)~图12(d)所示,桥梁跨中竖向位移能和cnn-lstm模型生成的数据吻
合,其中均方根误差最大出现在第261个样本处,其值为0.0275。而在桥梁竖向加速中,最大均方根误差为0.0529,出现在cnn-lstm模型生成的第32个样本处。同时可以看出,桥梁竖向位移的均方根误差值要比桥梁竖向加速度的均方根误差值小,其中500个桥梁竖向位移样本的均方根误差值围绕纵坐标为0.01上下浮动,而桥梁竖向加速度则是在0.02左右变化。
[0074]
在如图13(a)~图13(d)中,预测的车辆竖向位移均值曲线与monte carlo法得到的曲线能够很好的吻合,其过程中在第82个样本处产生了最大均方根误差为0.085。车辆竖向加速度在第448个样本处出现了最大均方根误差为0.1126。可以看出车辆竖向位移的rmse最大值都小于车辆竖向加速度的均方根误差值,且500个车辆竖向位移样本的均方根误差值整体是在0.01上下浮动,而500个车辆竖向加速度样本的均方根误差值是稳定在0.02左右。
[0075]
桥梁跨中竖向位移、加速度预测及误差曲线见图14(a)~图14(d)所示。图中实线曲线表示cnn-lstm模型深度学习预测结果,虚线曲线表示monte carlo法模拟结果,通过对比可以发现基本能够吻合。桥梁跨中竖向位移标准差最大误差出现在车辆刚起步的时候,误差为0.00008m,整个过程中误差曲线始终是围绕0上下振荡,很接近0。桥梁跨中竖向加速度曲线中,误差同样是出现在第一步时,达到了0.0125m/s2。在cnn-lstm模型的不断学习以及不断的调整学习率的情况下,精准度也在不断的提高。如图15(a)~图15(d)所示,车辆系统预测值吻合度较高,误差也同样满足要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1